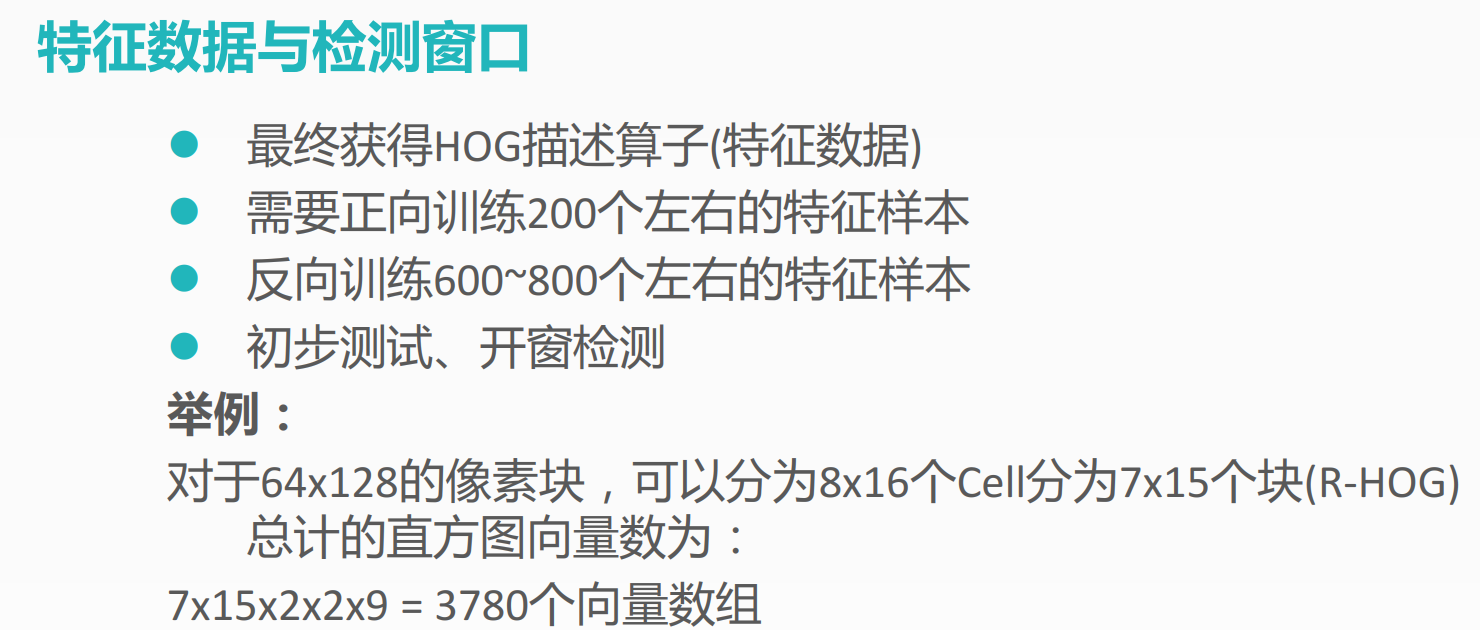
OpenCV——HOG特征检测

API:
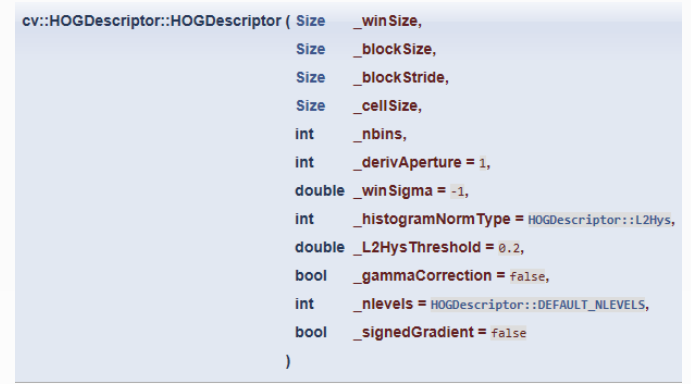
HOGDescriptor(Size _winSize, ---:窗口大小,即检测的范围大小,前面的64*128
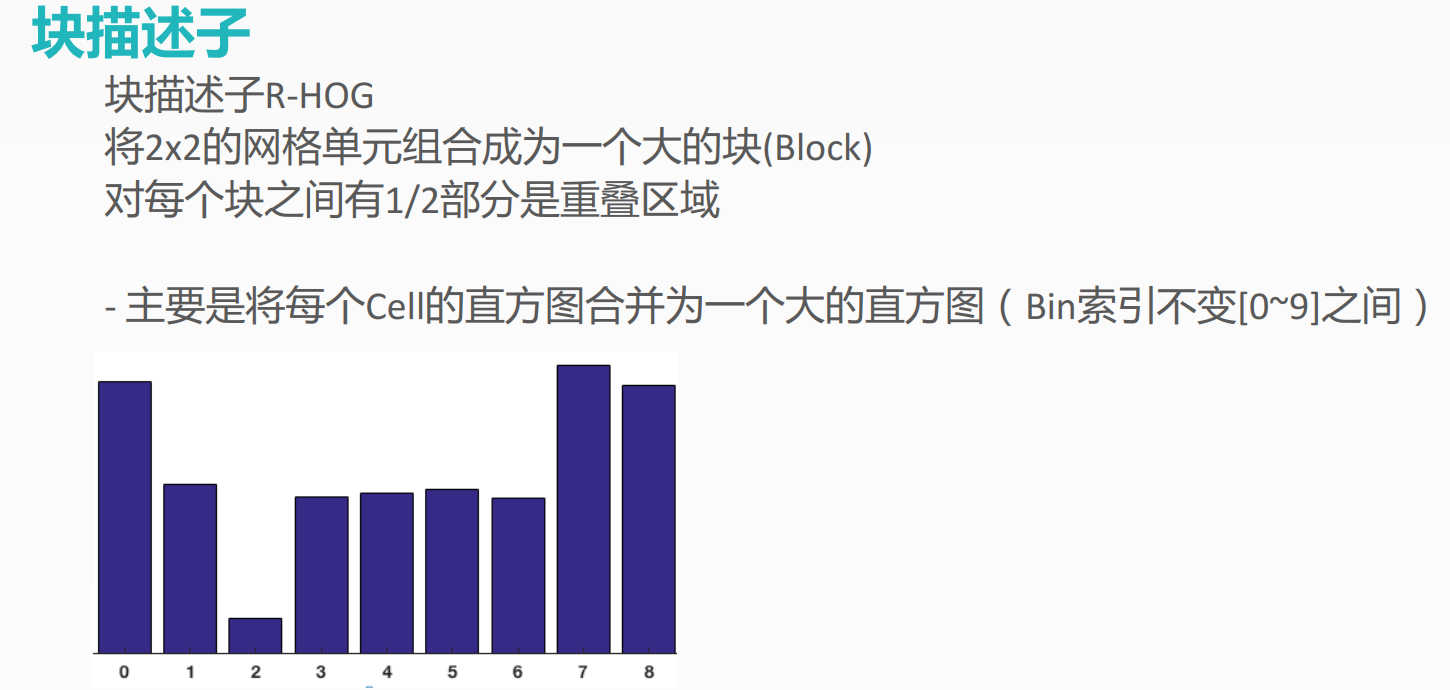
Size _blockSize,--- 前面的2*2的cell,即cell的数量,这里要填像素值Size(16,16)
Size _blockStride,---每次block移动的步长,以像素计,为一个cell像素块大小
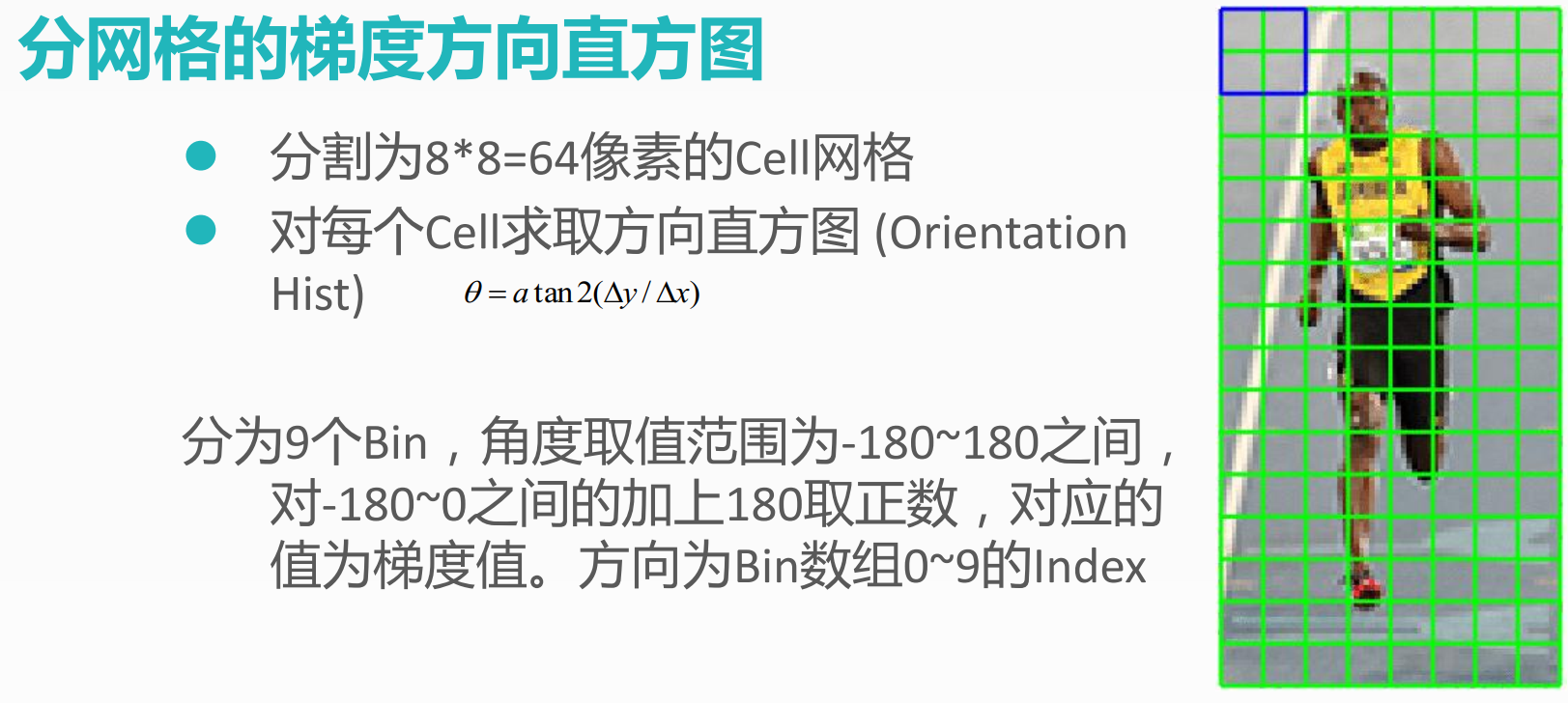
Size _cellSize, ---cell的大小,前面的8*8
int _nbins, ----直方图的组数
int _derivAperture=1, --梯度计算的参数
double _winSigma=-1, --梯度计算的参数
int _histogramNormType=HOGDescriptor::L2Hys,---归一化的方法
double _L2HysThreshold=0.2,
bool _gammaCorrection=false, ---是否要伽马校正
int _nlevels=HOGDescriptor::DEFAULT_NLEVELS,
bool _signedGradient=false)
#include <opencv2/opencv.hpp>
//#include <opencv2/xfeatures2d.hpp>
#include <iostream> using namespace cv;
//using namespace cv::xfeatures2d;
using namespace std; int main(int argc, char** argv) {
Mat src = imread("test.jpg");
if (src.empty()) {
printf("could not load image...\n");
return -;
}
namedWindow("input image", CV_WINDOW_AUTOSIZE);
imshow("input image", src); Mat dst, dst_gray;
resize(src,dst,Size(,));// 改变大小 cvtColor(dst,dst_gray,COLOR_BGR2GRAY); HOGDescriptor detector(Size(, ), Size(, ), Size(, ), Size(, ),);
vector<float> descriptors;//直方图向量
vector<Point>locations;
detector.compute(dst_gray, descriptors,Size(,),Size(,),locations);
printf("number of HOG descriptors :%d", descriptors.size()); waitKey();
return ;
}
使用OpenCV已经训练好的模型实现行人检测
#include <opencv2/opencv.hpp>
#include <iostream> using namespace cv;
using namespace std; int main(int argc, char** argv) {
Mat src = imread("行人.jpg");
if (src.empty()) {
printf("could not load image...\n");
return -;
}
namedWindow("input image", CV_WINDOW_AUTOSIZE);
imshow("input image", src); //使用opencv已经训练好的模型,实现行人检测
HOGDescriptor hog= HOGDescriptor();
hog.setSVMDetector(hog.getDefaultPeopleDetector()); vector<Rect> foundLocations;
hog.detectMultiScale(src, foundLocations,,Size(,),Size(,),1.05,);//在多尺度上寻找
for (size_t t = ; t < foundLocations.size(); t++) {
rectangle(src, foundLocations[t],Scalar(,,),,,);
} namedWindow("HOG行人检测",CV_WINDOW_AUTOSIZE);
imshow("HOG行人检测",src); waitKey();
return ;
}
OpenCV——HOG特征检测的更多相关文章
- Opencv HOG特征检测
HOGDescriptor hogDescriptor = HOGDescriptor(); hogDescriptor.setSVMDetector(hogDescriptor.getDefault ...
- OpenCV4.1.0实践(2) - Dlib+OpenCV人脸特征检测
待更! 参考: python dlib opencv 人脸68点特征检测
- OpenCV——SIFT特征检测与匹配
SIFT特征和SURF特征比较 比较项目 SIFT SURF 尺度空间极值检测 使用高斯滤波器,根据不同尺度的高斯差(DOG)图像寻找局部极值 使用方形滤波器,利用海森矩阵的行列式值检测极值,并利用积 ...
- OpenCV 之 特征检测
特征,也称 兴趣点 或 关键点,如下:蓝框内区域平坦,无特征:黑框内有"边缘",红框内有"角点",后二者都可视为"特征" 角点作为一种特征, ...
- 学习OpenCV——HOG+SVM
#include "cv.h" #include "highgui.h" #include "stdafx.h" #include < ...
- opencv图像特征检测之斑点检测
前面说过,图像特征点检测包括角点和斑点,今天来说说斑点,斑点是指二维图像中和周围颜色有颜色差异和灰度差异的区域,因为斑点代表的是一个区域,所以其相对于单纯的角点,具有更好的稳定性和更好的抗干扰能力. ...
- OpenCV——Brisk特征检测、匹配与对象查找
检测并绘制特征点: #include <opencv2/opencv.hpp> #include <opencv2/xfeatures2d.hpp> #include < ...
- OpenCV——ORB特征检测与匹配
原文链接:https://mp.weixin.qq.com/s/S4b1OGjRWX1kktefyHAo8A #include <opencv2/opencv.hpp> #include ...
- OpenCV——SURF特征检测、匹配与对象查找
SURF原理详解:https://wenku.baidu.com/view/2f1e4d8ef705cc1754270945.html SURF算法工作原理 选择图像中的POI(Points of i ...
随机推荐
- 【C#数据结构系列】线性表
一:线性表 1.1:定义:零个或多个数据元素的有限序列 1.2: 线性表元素个数n定义为线性表的长度,n = 0称为空表,i 为数据元素ai在线性表中的位序. 1.3:满足线性表的条件:(1):有序, ...
- Android-事件分发(ViewGroup)
http://blog.csdn.net/guolin_blog/article/details/9153747 http://blog.csdn.net/lmj623565791/article/d ...
- Android使用AOP
这里不讲aop的概念,网上资料很多,这里只讲如何配置aop和自定义plugin. 1.使用场景 在android中,有些业务是公共的,例如:登录判断.获取权限.网络判断等一些公用的业务逻辑,这些都可以 ...
- Maven构建的Spring项目需要哪些依赖?
Maven构建的Spring项目需要哪些依赖? <!-- Spring依赖 --> <!-- 1.Spring核心依赖 --> <dependency> <g ...
- python学习之老男孩python全栈第九期_day008作业
1. 文件a.txt内容:每一行内容分别为商品名字,价钱,个数,求出本次购物花费的总钱数apple 10 3tesla 100000 1mac 3000 2lenovo 30000 3chicken ...
- JavaSE——线程通信
线程通信: 如果线程A和线程B持有同一个MyObject类的对象object,这两个线程会去调用不同的方法,但是它们是同步执行的,比如:线程B需要等待线程A执行完了methodA()方法之后,它才能执 ...
- 微信小程序< 1 > ~ Hello 微信小程序
简介 微信小程序,最近声音比较大,开始慢慢学习一下这个小东西,从安装开发工具开始吧,不会JS,学起来会不会很吃力呢? 注册账号 参考官方网站 开发工具 1.微信Web开发工具 2.官方下载地址,针对自 ...
- SLAM产品化的一些思考
这两年一直在做SLAM产品化的一些工作,有些感触,想和大家分享一下.很多想法只是个人浅见,不当之处还望大家指正. 我这两年分别做了AR眼镜和辅助驾驶方向的开发,说实话,挫折大于成果.SLAM产品化之难 ...
- 大数据【六】ZooKeeper部署
这是一个分布式服务框架,阿帕奇的一个子项目.关于ZooKeeper我只简单的部署一下,以便后面的HBase. 一 概述 ZooKeeper 分布式服务框架是 Apache Hadoop 的一个子项目 ...
- 安装google,多试试
对于谷歌Chrome32位版本,使用如下链接: wget https://dl.google.com/linux/direct/google-chrome-stable_current_i386.de ...