Arduino I2C + 三轴加速度计ADXL345
ADXL345是ADI公司生产的三轴数字加速度计芯片,与ST的LIS3DH功能接近。主要特性有:
- 工作电压:2.0 ~ 3.6V
- 功耗:待机功耗0.1μA;工作时与数据输出频率(ODR)有关,如ODR<10 Hz时30μA
- 接口:I2C;三线/四线制SPI
- 分辨率:可选择,最大13-bit
- 内置FIFO
- single tap/double tap检测
- 自由落体检测
- 两个可编程中断输出脚
- 封装:3 x 5 x 1 mm LGA
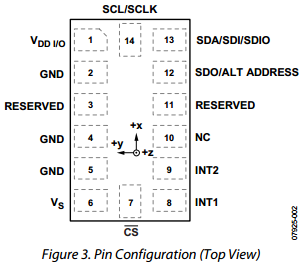
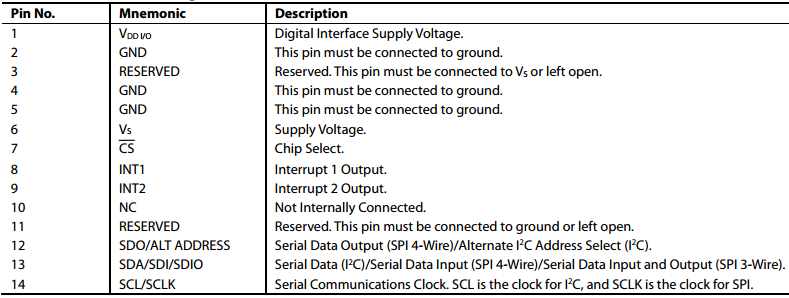
管脚定义
与Arduino的连接
用工作于3.3V/8MHz版本的Arduino Pro Mini进行调试。管脚定义、连接方法与调试LIS3DH时类似。采用I2C接口进行通讯,未利用FIFO和INT1、INT2中断引脚。
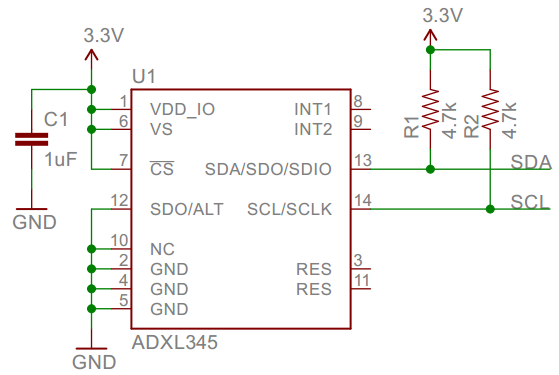
ADXL345 Pro Mini (3.3V)
VDD <------> 3.3V
GND <------> GND
SCL <------> A5 (SCL)
SDA <------> A4 (SDA)
功能调试
1. 操作方法亦和LIS3DH类似。但ADXL345似乎没有与LIS3DH的STATUS_REG寄存器,而是设定DATA_READY中断,然后利用INT_SOURCE寄存器判断是否有中断事件发生,从而判断是否有新的测量值。
2. 留意设置的ODR频率不要超出I2C总线的数据读取速率。如Arduino的I2C总线时钟频率为100kHz,则可设置的最大ODR为200Hz。
测试代码
/*
Measurement of acceleration values using motion sensor ADXL345
*/
#include <Wire.h> #define ADDRESS_ADXL345 0x53
#define DATA_FORMAT 0x31
#define BW_RATE 0x2C
#define POWER_CTL 0x2D
#define INT_ENABLE 0x2E
#define INT_SOURCE 0x30
#define DATAX0 0x32 byte buffer[];
byte intSource; boolean ready = false; int outX, outY, outZ;
float xVal, yVal, zVal; void setup()
{
Wire.begin();
Serial.begin(); delay(); // set scale = +/- 2g, 13-bit mode
Wire.beginTransmission(ADDRESS_ADXL345);
Wire.write(DATA_FORMAT);
Wire.write(0x08);
Wire.endTransmission();
// set ODR = 1.56 Hz
Wire.beginTransmission(ADDRESS_ADXL345);
Wire.write(BW_RATE);
Wire.write(0x04);
Wire.endTransmission(); // start measurement
Wire.beginTransmission(ADDRESS_ADXL345);
Wire.write(POWER_CTL);
Wire.write(0x08);
Wire.endTransmission(); // enable DATA_READY interrupt
Wire.beginTransmission(ADDRESS_ADXL345);
Wire.write(INT_ENABLE);
Wire.write(0x80);
Wire.endTransmission();
} void loop()
{
// check data ready
while(ready == false)
{
Wire.beginTransmission(ADDRESS_ADXL345);
Wire.write(INT_SOURCE);
Wire.endTransmission();
Wire.requestFrom(ADDRESS_ADXL345, );
if (Wire.available() >= )
{
intSource = Wire.read();
}
if (bitRead(intSource, ) == ) //new data available
{
ready = true;
}
}
if (bitRead(intSource, ) == )
{
Serial.println("Some data have been overwritten.");
} //read the result
Wire.beginTransmission(ADDRESS_ADXL345);
Wire.write(DATAX0); //read multiple bytes
Wire.endTransmission();
Wire.requestFrom(ADDRESS_ADXL345, );
if (Wire.available() >= )
{
for (int i = ; i < ; i++)
{
buffer[i] = Wire.read();
}
} //calculation
outX = (buffer[] << ) | buffer[];
outY = (buffer[] << ) | buffer[];
outZ = (buffer[] << ) | buffer[];
xVal = outX *3.9;
yVal = outY *3.9;
zVal = outZ *3.9; Serial.print("outX: "); Serial.print(xVal); Serial.print(" ");
Serial.print("outY: "); Serial.print(yVal); Serial.print(" ");
Serial.print("outZ: "); Serial.println(zVal); ready = false;
}
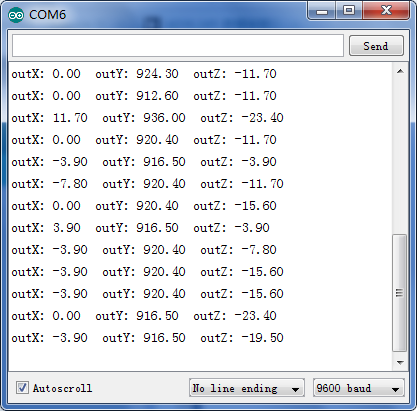
ODR设定为1.56Hz,通过串口打印三个维度的加速度值,单位为mg。
参考资料
Arduino I2C + 三轴加速度计ADXL345的更多相关文章
- Arduino I2C + 三轴加速度计LIS3DH
LIS3DH是ST公司生产的MEMS三轴加速度计芯片,实现运动传感的功能.主要特性有: 宽工作电压范围:1.71 ~ 3.6V 功耗:低功耗模式2μA:正常工作模式.ODR = 50Hz时功耗11μA ...
- [每日电路图] 8、三轴加速度计LIS3DH电路图及功耗等指标
看TI的官网资料:http://www.st.com/web/en/catalog/sense_power/FM89/SC444/PF250725 一.初次接触关注的信息: 1.1.概述中的关键信息 ...
- LIS3DH三轴加速度计-实现欧拉角(俯仰角,横滚角)
1. LIS3DH管脚定义 PS:LIS3DH和mpu6050的X和Y方向是相反的, mpu6050如下图所示: 2.LIS3DH加速度计介绍 由于LIS3DH只可以得到XYZ加速度,无法获取角速度, ...
- 【雕爷学编程】Arduino动手做(48)---三轴ADXL345模块
37款传感器与模块的提法,在网络上广泛流传,其实Arduino能够兼容的传感器模块肯定是不止37种的.鉴于本人手头积累了一些传感器和模块,依照实践(动手试试)出真知的理念,以学习和交流为目的,这里准备 ...
- STC8H开发(七): I2C驱动MPU6050三轴加速度+三轴角速度检测模块
目录 STC8H开发(一): 在Keil5中配置和使用FwLib_STC8封装库(图文详解) STC8H开发(二): 在Linux VSCode中配置和使用FwLib_STC8封装库(图文详解) ST ...
- STC8H开发(六): SPI驱动ADXL345三轴加速度检测模块
目录 STC8H开发(一): 在Keil5中配置和使用FwLib_STC8封装库(图文详解) STC8H开发(二): 在Linux VSCode中配置和使用FwLib_STC8封装库(图文详解) ST ...
- 三轴陀螺仪与加速度计如何辅助 iPhone 定位的
在所有之前解释一下陀螺仪 根据Wiki的定义:「陀螺仪是用于测量角度或维持方向的设备,基于角动量守恒原理.」 这句话的要点是测量角度或维持方向,这是 iPhone 4 为何搭载此类设备的原因.机械陀螺 ...
- 开源三轴云台EVVGC(simple BGC)分析
一. 主程序分析 主程序结构清晰,流程如图所示,下面将对每个部分做详细分析 二. 系统初始化 系统初始化部分的流程如上图所示,下面对每部分做具体分析 1. 时钟初始化 该部分主要是使能DWT,用DWT ...
- 单片机实验: 三轴磁场模块 GY-271
最近买了一块三轴磁场模块进行实验 名称:HMC5883L模块(三轴磁场模块) 型号:GY-271 使用芯片:HMC5883L 供电电源:3-5v 通信方式:IIC通信协议 测量范围:±1.3-8 高斯 ...
随机推荐
- vue-cli 自定义过滤器的使用
vue-cli 自定义过滤器的使用 vue2.0将内置过滤器去除,所以过滤器需要自己编写. Vue.js 允许你自定义过滤器,可被用作一些常见的文本格式化.过滤器可以用在两个地方:mustache 插 ...
- Django xadmin的使用 (三)
关于报错: 1.在页面添加好新的用户后登录报错 解决方法: 新建一个app,名叫app D:\myfiles\study\python\django\datas>python manage.py ...
- rails 部署 nginx + passenger
转自 http://segmentfault.com/a/1190000002911605 https://ruby-china.org/topics/16245 运行 RAILS_ENV=produ ...
- node / npm 配置问题
安装nodejs 后运行 npm 命令无响应处理方法 安装和卸载过nodejs, 也编辑过 C:\Users\{账户}\下的.npmrc文件. 再全新安装nodejs ,运行npm 命令,无响应. 处 ...
- MySQL用变量的方法添加伪序号列(自增序列)
在进行数据筛选时,可能会用到给每一条数据配上一个唯一的序号,便于进行定位. 方法: 序号的设置: @rownum :=@rownum + 1 AS rownum 获取序号的伪表[必须]: (S ...
- 自定义javascript日历控件
Web页中的日历一般离不开表格,通常都使用表格装载指定月的日期等信息.所以,要编写JS日历,首先必须解决的问题是表格的行与列问题.列是固定的,七列,因为一周有七天.行需要动态计算,因为,每一个月的第一 ...
- java 多线程下载文件 以及URLConnection和HttpURLConnection的区别
使用 HttpURLConnection 实现多线程下载文件 注意GET大写//http public class MultiThreadDownload { public static void m ...
- 我的MBTI性格测试
写在前面: 很多人争论MBTI靠谱不靠谱.一个人的性格肯定不能只用这么几个维度就能描述的,一个人的性格也肯定不是通过这么几个问题就能测出来的,一个人的性格也肯定不是一成不变的,所以MBTI的准确度肯定 ...
- 303. Range Sum Query 范围求和系列
Immutable [抄题]: Given an integer array nums, find the sum of the elements between indices i and j (i ...
- spring与mybatis五种整合方法
1.采用数据映射器(MapperFactoryBean)的方式 不用写mybatis映射文件,采用注解方式提供相应的sql语句和输入参数. (1)Spring配置文件: <!-- 引入jdbc ...