我的大学,我的SPR机器人队
时间过的真快,我这个在协会呆了好多年的老油条今年都毕业了,在石油大学大学七年几乎三分之二的时间就是在协会度过的。实话说在北京这是我最亲切的地方,这里有我喜欢的各种设备,有亲爱的老师和一起奋斗的队友,在这里收获成功的喜悦与失败的无奈,在这里开始我真正的大学生活,也从这里为梦想启航。此文主要分享的是我这几年的在大学里的经历以及协会的发展过程,以回顾这几年的青春时光。
我的大一生活是迷茫的,天天学习高等数学、C语言然后考试,虽然都是考了九十多的高分,但是还是不明白实际运用中有啥用,或许这也是老师的悲哀,讲一门知识却不跟学生讲明白这门知识在实际中的具体作用。你要早告诉我Unsigned Char变量对应的寄存器的状态对应八个LED灯,对这个Unsigned Char型的变量左移或者右移能够来个流水灯这么酷炫的效果我肯定会在C语言启蒙的时候有更好的认识。我也经常在图书馆自己看看微机原理,但是那时候看这个东西感觉有点难,看不懂,看懂了也不知道怎么操作,所以仍旧是很迷茫,我的四年要这么过吗?
我是阴差阳错知道学校有个机器人协会这么高大上的社团的。大一结束有个综合测评,有各种加分,但我们宿舍的几个大一除了学习、吃饭、睡觉、看《凡人修仙传》就没有别的项目了,所以综合测评没占优势。舍友何胜听他老乡学长说,学校有个机器人协会,在那里不但能够学到专业知识,而且参加机器人比赛对综合测评还有加分。至此关于机器人协会和机器热比赛的了解我还是听他偷偷摸摸的跟我说的,有那么点神圣感,但是我那是在开始忙着带家教了,并没有把他的话放在心上,因为大二开始的时候我决定要自己赚钱经济独立了,这可能比较现实吧,所以对他说的不是很兴奋。2011年校内赛报名的时候,他凑人数报名组成了一个队,没跟我说就把我的名字加上去了。当时的校内赛分为两个环节,第一个是画图比赛,第二个是循迹小车比赛。一开始协会给我们开了个专门的solidworks培训,主要讲解这个软件是怎么操作的。迟到的我进门的时候恰好看见刘阳学长在进行装配体配合,我简直兴奋无比,天呐,世界上竟然有比AutoCAD2004这种奇葩的软件更好用的建模软件!于是我慢慢有点兴趣了。第一个环节主要就是以solidwoks为基础,针对2012年的比赛中的手动机器人(此届手动机器人要求人坐在上面)进行机械方案设计,一个月之后上交作品。一开始的一个星期我们组的是三个人都在讨论方案,查阅了许多机构学的书籍(建议一开始看"机构学"的书籍会很好入门,一开始就开始看"机械原理"有点抽象),然后上自习的时候就拿着草稿纸在纸上画想法(其实后来觉得初版阶段拿草稿纸画方案还是很好的选择),那种感觉简直爽爆了。一个星期过后我的其他两个舍友就不怎么对这个热情了,说让我画图,画好了跟他们讨论下,他们一个打游戏去了(说大二新买的电脑要磨合磨合),另外一个和妹子约着上自习去了,我呢是越画图越兴奋,当然最后结果还是可喜的,我们通过了第一轮的考核。
第二轮考核是循迹小车比赛,在一个专用的赛道上让小车沿着白线行驶,最快到达终点者获胜。这也是第二次让我心潮澎湃的过程,第一次我知道了十六进制干啥用的,第一次知道了C语言的魅力,第一次调试AVR单片机,第一次给一个命令电机就动起来了,哇塞,简直太爽了!最终我们队的成绩是第六名,拿了个二等奖,太激动了。大家好,我要向大家隆重介绍下,这是我的爱车!

大二的第二学期,过完年,接到机器人协会主席的电话问我有没有意愿跟他们一起参加全国大学生机器人大赛,说也和其他学校的学生一起比一比,当时我高兴坏了,就这样我加入了手动机器人的机械设计组。那时候我天天下完晚自习就搬着电脑去润杰九楼,粘着组长进一步学习机械机构以及三维绘图,那段时间我的绘图能力进步的很大,也和队员们越来越熟悉。后来组长看我进步很大,就开始让我负责手动机器人的机械手设计,其实就是一个夹具,夹起一个15mm厚度的一个塑料道具。那是我第一次画加工图,第一次跑加工厂,那段时间感觉很充实,白天上课,下课了就直接去协会,十一点宿舍关门的时候回宿舍。比赛的日子一天天接近了,我们的任务也越来越近,机器人最后装上了我设计的机械手机构去比赛了,甚是欣慰,同时也很感谢当时队长陆映辉对我的支持与栽培。12年的主题是"平安大吉",
参赛双方分为红队和蓝队,每队有三台机器人(一台手动机器人和两台自动机器人)。其中一台大自动机器人负责托运另外一台小自动机器人越过障碍到台阶处,然后小机器人自动登上两级台阶实现抓取道具的任务。
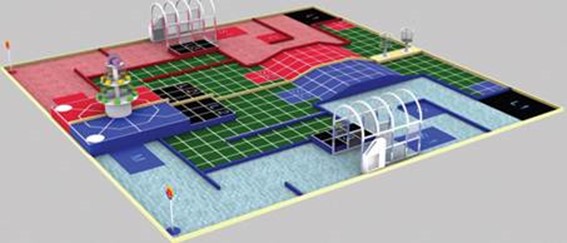
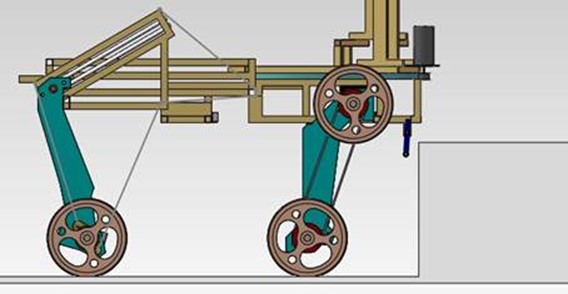
其中最难的机械设计我觉得就是小自动机器人怎么爬台阶的设计了,最后刘阳学长带领的自动机器人组从救护车上的担架床得出灵感(可见细心观察生活的重要性),设计出了带有"狗腿"的结构,使小机器人实现了爬台阶的动作(后来robomasters也面临登岛问题,其实差不多)。ROBOCON的比赛一直都是三分钟结束比赛,当时我们的想法就是三分钟内完成任务就行了。赛前在家里联调的时候,实现了好几次完成任务,大家开心坏了,出发去哈尔滨前也是信心满满。关于2012年的比赛的准备过程,中央电视台也对我校机器人队进行了跟踪报到。
(亚太大学生机器人大赛国内选拔活动http://www.cup.edu.cn/news/sdsp/ztsp/81348.htm)。
此次我校参赛队总共参加了三场小组赛的竞技,分别是与北京邮电大学、厦门大学和哈尔滨工程大学2队对阵。其中与北京邮电大学的比赛中,我们的自动机器人始终未能成功地爬上桥面,导致了比赛任务未能完成;与厦门大学的比赛中,由于我们及时的修正了上一场比赛中的问题,自动机器人虽然成功的爬上了桥面,但是收集机器人的触发开关突然失效,又导致了收集机器人无法启动,从而也未能完成比赛任务;在最后一场和哈尔滨工程大学2队的对阵中,由于我们手动机器人的手柄控制芯片失效,致其无法正常启动,从而也导致了本场比赛的失败。虽然在实验室调试的过程中,我们的机器人只在短短的几天内便取得了两分十秒就能完成比赛任务的不错成绩,但是纵观这三场比赛,我校上场的三个机器人各出现一次重大的失误,直接导致了三场比赛均惨遭失败,无一完成任务。而纵观这三次失误,可以发现我们最大的失误并不是在技术上,而基本上是参赛人员的疏漏,属于重大的非技术性失误,是完全可以避免的因素。因此,我们队也就提前出局了,没有进16强。如果说是技术上的差距,我觉得是我们的车体加工的太沉了,几乎都是不锈钢焊接而成,而哈工大、电科灯强队都是以一身的全铝焊接惊艳全场。
我当时是组委会的裁判,所以咱们学校比完了之后我还在现场,负责拍摄各校机构。就在拍摄过程中,总会出现一下小插曲,在拍哈工大的结构的时候,人家直接大声说了,再拍就把相机砸了,还趾高气昂的问我是哪个学校的。加上当时学校机器人比赛失败,当时我的心情非常低落,感觉在别的学校面前抬不起头似的,这种感觉很不好,我心里默默咬牙,总有一天我们会牛逼起来让你们瞧瞧。当时队里有个留学生叫王家豪,负责控制的,晚上找我喝酒聊天安慰我,说咱们好好搞还是有机会的,就差那么一点点。我们住在哈工程的一个宾馆里,他的名字我现在都还记得,叫"枫林晚"(哈哈),那一晚也认识了华广的兄弟魏基栋,我们在哈工程路边的草坪上聊了一夜关于比赛,关于队伍如何发展的问题。第二天晚上我们租了个大巴回学校,回来的路上大家都是沉默的,现在都不能想想是怎么回到学校的。

2012年暑假,老队员王家豪给我们几个培训了一下控制的东西,然后和之前的几个老队员都撤离了,有的是因为毕业有的是因为要准备考研,九楼开始变得空荡荡的。我也开始从从事控制部分的学习了,一切放佛是从零开始,前辈留下的只有一行行代码。上一届留下的队员包括我在内只有五个人,两个大四的,三个大三的。
2013年的ROBOCON主题是"绿化星球",主要的难点是全场定位以及其中的一个发射机构的设计。2013年在我看来是我经历过的协会最暗淡的一年,一方面好多都是新人没有人带领,另外一方面大四的队员太忙基本心思不在比赛上,下图是比赛前的几天晚上还在装配的情景。

结果可想而知。其实在去长沙(2013年在长沙的国防科技大学举办比赛)之前,每个晚上大家都在熬夜,熬的不行了就去楼道里面去抽烟,然后又继续干。去之前大家的心就死了,再加上小组赛被抽到了死亡小组:电科、哈工大、太原工业,中国石油,结果又是提前出局了,不过这次和2012年不一样,这次没有一点遗憾你懂吗,因为2012年大家心连心付出了太多,整个队伍的心的聚在一块的。当时我们私下都在埋怨某几个队员,没有及时的完成任务而拖累了大家,其实后来我反思这件事,问题应该出在管理层上,没有指定一个很好的项目安排而是一个懒散的管理风气,所以出现这样的局面也是情有可原。虽然我当时看到了一些不好的风气时没有及时表明自己的态度,以为这样会伤了和气,所以对于学长们不对的做法也就睁一只眼闭一只眼了。我后来也很后悔,当初如果我狠心提出问题,事情也就不会到后来那么个程度了吧?所以后来我当队长的时候,我总是想让每个队员发表一下看法,遇到问题观点不对的要敢"吵",一个队伍不吵吵我觉得都不正常,都不能迸发出思维的火花。
2013年比赛回来,队伍只剩下三个人,耿鹏、阿曼别克和我。三个人的暑假就是在润杰综合楼九楼硕大的300平米左右的实验室度过的,我们经常开玩笑说,在北京能住这么大的房子真是太享受了。在这年暑假,我向老师申请买了一台铝焊机,虽然2013年没有在减重问题上头疼,但是我觉得这种东西还是自己掌握了比较好,外面找师傅焊接真是太浪费来回跑路的时间了。我用了3瓶氩气,从焊接不锈钢开始练习起,往返于学校和水屯不锈钢加工厂,每天焊接2小时,到开学的时候终于掌握了铝焊接技术,当时真的是激动,当然双手也烫伤了不知道多少次。
大四第一学期,我们三个月内推了一下,我来当队长,其他两个人当副队长。为了能够很好的胜任这个职位,我在图书馆学习了大量的关于项目管理的知识,我始终认为,机器人比赛其实就是一个项目,按照科学的项目管理的方法肯定能取得更好的成果。一个队伍就像一个军队一样,如果作风懒散肯定大不了胜仗。不得不说,当队长队人特别能锻炼人的能力,我也非常感谢这一年带给我的成长。

第一件面对的问题是纳新。当年宣传的同学不干了,没办法我就用美图秀秀做了一张海报,主题是走的"理想"路线,标题是"如果你有一个梦想, go to protect it!",就是想要吸引那些不甘落后,有理想有抱负并且对机器人比赛感兴趣的人来共同去做一件事情。那时候我喜欢上一部电影《钱学森》,由陈坤主演,讲述了建国初期我国研发导弹的一个过程。我看到这里,感觉咱们机器人队当前所处的阶段不也是建国初期一样吗——面临着发达国家(电科、哈工大、北科等等)来自技术上的压力。还特别喜欢里面的台词:"在我们创造奇迹的事业上,虽然没有那么一大批名牌大学毕业的科学家,但是我们真的有着一批信仰坚定,愿意为共和国国防事业付出终身的理想主义者",以及"美国人能造出来,我们中国人不比他们少个脑子"。新纳入的队员的考核分为三轮,第一轮是了解机器人比赛观看以前的比赛视频然后在纸上画出比赛中用到的结构,第二轮是循迹小车比赛,第三轮是足球比赛。

第一轮我个人人为是比较好的一种头脑风暴的方式,给你一张A4白纸,一支铅笔,让你在三十分钟之内画出视频中的机械结构,给出的方案越多分数就越高。在这里当时就有人有疑问,问我为什么不考solidworks或者AutoCAD,我当初给出的回答是,这两门软件有点专业,会对那些不专业但是想法比较好的人不公平,况且你看过达芬奇用过soldiworks吗?
第二轮我要准备的就是制定规则和申请经费,最后让第一轮通过的选手组成队伍,经过抽签,让其中的某个队伍负责去市场上去购买模型车套件。因为考虑到这批人是零基础,所以直接购买回来拼一拼就可以工作的套件,便于让他们尝到一点模型车的甜头,如果一开始就是学习怎么焊接电路怎么加工的话效果可能不是太好,毕竟让他们先入门。套件一到,我给大家发放资料和比赛规则,然后给他们一个时间限制,他们就开始自己学习去了,因为基本上都是些C语言的知识,所以难度应该不是很大的。通过这段时间队他们调试的观察,对各队的情况进行打分,然后到了最后内部决赛再加上比赛成绩,得出调试阶段的总分。
第三轮是内部足球比赛,通过比赛我主要观察新队员的团队合作能力,这个阶段会有一个主动的打分,衡量规则不是很明确,得出一个分数,此分数加上调试阶段的总分得到该队员最后的得分。
通过上面的筛选,前十名留下来。至此,协会终于拥有的新鲜的血液了。这帮新人从加入协会到比赛结束,我采取的都是"高压"政策,规定的任务完不成,我带头加班到深夜,甚至到了后期硬性要求大家把被子带到九楼的楼道里打地铺的,那两个月从六楼到十楼的楼道,睡得都是机器人协会的。当然,现在我不是特别推荐这样做,当时之所以会出现这样的情况是因为我们当时迫切的做出点成绩,迫切的想证明自己。不想下一次参加ROBOCON还是回来被人取笑"小侯,你又拿了一个三等奖啊""去了就是三等家吧?"等等让人屈辱的话语,我们要做的就是想来一个漂亮的咸鱼翻身!感谢当年一起熬夜一路拼搏的小伙伴们!
ROBOCON的方案准备上,我们走的是讨论加实验的方式。因为好多东西都是摸着走,并不是很了解,所以对方案的可行上是经过了激烈的讨论的,往往就某个方案大家争的面红耳赤,甚至打起架来。每每看到这样的战乱场面我就非常乐,因为我觉得这种讨论的氛围非常好,成果也更加显著。理论上大家一看就有问题的东西,一般就不用再去花时间做实验论证了,对理论上通过的东西再去做实验往往能够少走弯路。往往一个队伍在方案上多花点时间讨论得出一个巧妙的方案还是有很大优势的,坑友们流行着一句话,第一眼大家都想到的方案往往不是最好的方案。我特别反对将一个机器人的机械设计全部交给一个人完成,然后就靠着他度过比赛,这不是一个队伍应该有的表现,往往这个人都是老队员,纵然有很多"经验",但是依然会压制新队员的成长,这一点上需要做好协调。2014年的比赛中有两台机器人,一台手动一台自动,针对自动机器人我们内部分成两个组来进行比赛,看谁能提前完成任务。当时机器人的"爬楼梯"(跟2012年的台阶是不同的),以及"走梅花桩"设计机构是最难的部分,王启明和岳炜超在其中发挥了巨大的创新作用,最后小机器人能实现了所有功能,去比赛的时候一看太原工业学院(2014年全国冠军)的小机器人发现,我们的结构和他们的是一样的也是欣慰,虽然我们的最后小机器人和大机器人的配合上不如人意,但是这一点却丝毫必能掩盖小机器人的特色。
那时候因为我们是住在实验室的,所以每天晚上十二点召集大家开会,我一般是给大家猛灌心灵鸡汤,然后就开始工作。过完年的那几个月,岳炜超、王启明、耿鹏和我一般都是天天通宵到早上六点,基本上在方案确定之前,车子不知道做了多少版,王启明同学比较特别,通常熬夜搞一晚上第二天一辆车子就出来了,耳机里循环播放坦克战车的音乐。我一般到了早上六点就去睡觉去了,耿鹏洗了洗脸,继续去上课去,据说最后还考了个专业第一,也是让我佩服,那段时间真的是撑过来的,睡觉了脑子里做梦想的都是机械结构。
在邹城比赛的前一天晚上,手动机器人的电路板烧了,大半夜的还在宾馆大换血。当时并没有找出问题,但是当时的电路是我画的,为此我也深深的感到内疚。好在第二天的比赛顺利进入了十六强,当陶志杰在赛场上操作手动机器人的时候,我在看台上远远的观看,内心特别特别的紧张,但看到进入16强的时候突然感到如释重负,虽然小组赛的对手很菜,所以有人说抽签抽的好,但我更相信越努力越幸运,这个16强来之不易,我们等了足足5年。

这一年,协会也打破了往日"闭门造车"的做法,积极主动的和各个学校进行交流,先后拜访了北京科技大学机器人队、北京交通大学机器人队以及北京邮电大学机器人队。同时了组织了各个学校队员来我校机器人队参观,那时我们掌握的铝焊接技术还是比较先进的,其实他们过来参观主要也是来看铝焊接的,而我们当时也就只有这个可以拿出来让大家看看的。一个人的思想总是局限的,一个团队的思想往往也是闭塞的,如果多和其他人进行交流,多和其他队伍进行交流,必然能够扩大人的视野,增长见识。

这一年最头疼的是经费问题,学校固然有10W的专项经费,但是是每年五月份发下来,也就是说从去年九月份到五月份的这段时间里面都是在借钱,当时张蓬老师硬着头皮向机械学院借钱,有一天我去借钱买电机,刚好碰见了机械系的主任刘书海,他直接说现在经费紧张,系里的钱是花在学生正常上课上的,不是机器人比赛的,不借!那时候我差点跟他干起来了,还好最后张老师苦口婆心的求了情。然而在这样艰苦的环境中,我们还是依然坚持着一个原则就是"省钱买设备",同时把协会里不用的破铜烂铁都卖了维持正常的开销。当时看到北交机器人队有自己的机床,民用电压供电,当时我们几个队员觉得要是咱们拥有这么一台机床估计连飞机都能造出来了,因为我们当时最先进的东西就是铝焊机,然后就是角磨机了,所以当时又是不要脸的去求老师,虽然这台多功能机床已经慢慢的被弃用了,但在我眼里它就是一台沉睡着的老变形金刚罢了。令人开心的是,下一届又陆续增加了线切割、激光切割、3D打印机、自动攻丝机等等常用的工具,极大的提高了研发的效率。
成事在人,我觉得2014年比赛过来的队员真的很棒,没有他们的付出就没有协会咸鱼翻身的机会。
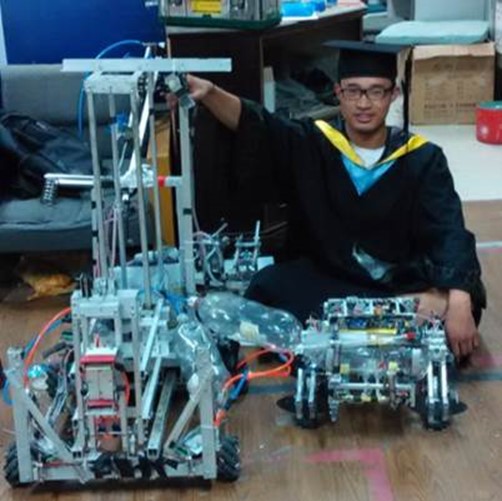
比赛结束刚好毕业,没来的和大家合影,就和我们最可爱的两台机器人合影,至此本科生活结束了,ROBOCON生活也基本结束,接下来开启RoboMasters之旅

2014年暑假我去深圳参加了大疆举办的RoboMasters举办的机器人夏令营,在第十六组负责机械设计(当时我校参加夏令营的只有两个人,我和王启明,夏令营一共108人)。上图就是我参与改装的RoboMasters战车,这就是现在RoboMasters战车的前身。我抱着它从深圳北坐高铁到北京西,再到润杰九楼机器人协会,这辆车是我校第一辆也是北京地区2014年唯一一辆完整的一辆战车,第一眼见到官方提供的底盘的时候我就深深的被这种设计所吸引。
RoboMasters比赛以前所未有的豪气与酷炫的舞台效果迅速的席卷全国各大院校,其独特的裁判系统也增加了比赛的公平性,在控制上对云台的控制要求较高,可以手动控制也可以加入机器视觉进行自动控制,机械上可以发挥的是摩擦轮发射机构的设计。第一届RoboMasters比赛,我也顺理成章的继续组队参加,但此时相比较其他学校而言,我们有一定的优势,第一我们有两名队员去深圳"深造"回来,第二我们有一台完整的战车与一台战车的所有零部件。
这一次我继续担任队长与发射机构的设计,根据夏令营的经验以及本次比赛的规定,摩擦论的速度没有限制,而官方给出的摩擦轮发射机构上的摩擦轮是低速摩擦轮,也就是说你如果不对其进行改造的话,大家的发射速度都是一样的。但是夏令营中最牛逼的队伍充其量也只是将官方的摩擦轮绕了根钢线防止扩张而已,而要设计加工更耐高速与强度的摩擦轮还必须要从工艺上去考虑。从淘宝上不停的变换搜索名词往往能够获得很大的收获,但这次也没有搜索到有用的消息。终于有一天我在图书馆化工类书籍的架子上找到了一本关于橡胶加工的书籍,具体哪本书我忘了,上面写了一种复印机上的一种告诉胶辊的加工工艺,顿时我感觉找到了新大陆,于是顺藤摸瓜在淘宝上找到了有关胶辊的一些产品,然后发现了类似于摩擦轮的东西,于是找商家商谈定制些样品实验一把。果然,记过几次的实验之后,发现某种橡胶的配比可以达到最好的效果,记得在深圳决赛的时候好多参赛队说看不见中石油的子弹(因为太快了),同时官方的临时加的测速机对我们的子弹都不起作用。可以好不客气的说,我为RoboMasters比赛的摩擦轮做出了非常大的贡献,到2016比赛的时候一看,全国80%的学校都是用的我设计的摩擦轮,同时我也加设计图纸和设计论文公布到RoboMasters论坛和大家分享,这篇文章以及附件里面的论文得到了极大的好评,中石油的名字也在学校间传开,这种感觉是非常爽的。同时也将信任的摩擦轮加工地址分享给大家,为此加工厂的淘宝页面还在宝贝描述里面用文字"感谢侯生的支持与信赖"。机器人比赛本来就是个相互学习相互促进的一个过程,所以我没有保留的将这些分享出去,我觉得这才是机器人比赛应该有的样子。
2015年的比赛我们取得了北方地区的亚军(同时耿鹏带队的ROBOCON传统比赛也取得了全国亚军的好成绩,真是两地开花),算是没给学校丢脸,毕竟学校辛辛苦苦把北方赛区的承办权给揽下来,那几天洋葱头体育馆里好生热闹。忙完了分区赛,八月就要去深圳参加总决赛了,为了提高整体实力,老师希望我们对其中的一个哨兵机器人进行改装,尝试当时速度较快的空气动力行驶的涵道推进,也就是说在接下来的两个月我们总结分区赛中出现的问题以及对机器人进行修修补补的同时还要设计一版哨兵,因为分区赛的哨兵不稳定了。当时也是犯糊涂了,竟然就抛开第一版哨兵进行新的设计了。而这苦果总是有人要吃的,我在调试涵道风扇过程中被涵道打伤了,左手无名指的一块肉被打掉,连夜被送到积水潭医院进行植皮手术。导致现在手上的这道伤疤,这可能是对比赛的烙印吧,一辈子都消不掉。

深证决赛我们一路挺进,在8进4的第一场比赛中,射手机器人发射机构出了问题输掉了比赛,最后发现是弹夹滑丝了,而这个是完全可以通过赛前检查来避免的,细节决定成败真的不假。可喜的是2016年,龚普(2014年纳新的那一批队员)带领的RoboMasters战队在深圳总决赛中获得了全国第二的好成绩,不负众望。
满打满算,在机器人协会呆了四年(其实在实验室也住了快四年),石油大学机器人协会在这几年的成长是有目共睹的,我也从当初的迷茫少年成长到一个成熟的青年,在这里有我的青春,它给予了我成长,感谢学校,感谢老师,感谢队友!
最后附件是我个人关于协会发展的一些想法与建议,或许对你们还有用。
附件:
人力资源
队员选拔
有什么样的队友就有什么样的战斗力,广大坑友们都非常赞同一句话那就是"队友当不好就成了敌人了"。我们需要什么样的队友呢?做为一个老队员,我在招募新队员的时候往往关注:
(1)对机器人是否感兴趣
ROBOCON被誉为国内最有价值的比赛,能够将机械电控紧密结合的一个项目,从ROBOCON比赛走出去的工程师几乎占了中国的一大半。这里是工程师的摇篮,是梦想的起航点。对机器人技术没有兴趣或者兴趣不浓厚的人是不适合当队友的,志同道合嘛!目的一定要单纯,虽然ROBOCON比赛能很大程度上的改善同学们的综合测评成绩,但是这是学校对我们队员辛苦汗水的照顾。这一年中也有那么几个专门为了加分过来的,甚至还有隐藏好深的老队员,一经发现就被踢了。SPR的风气一定要纯,这里是机器人爱好者的天堂,绝对不能出现其他奇奇怪怪的东西。
如果你在SPR想等着师兄师姐们来教你知识的话,那么你就错了, SPR是不支持不推荐灌输式学习的,在这里你需要自主学习,主动学习。当然师兄师姐是个比较好的资源。大学生本来就应该养成自主学习的能。
3是否有较强的团队合作能力即使你再牛,你不与别人合作那事情是做不好的。还记得去年开始的时候我试图把BBS上的整天晒作品的技术达人拉过来一起搞比赛,但是从其周边同学身上以及与这些传说中的牛人身上却发现这些人不擅长合作,于是此事也就作罢了。
我一直认为队员培训和公司对职员的培训一样重要,直接关系到这帮人是不是很能干的问题。一个良好的培训应该从文化—技术这两个方面来展开。第一感觉是非常重要的,直接体现在公共场合招聘宣传的形式上,高端大气上档次,让新人体会到SPR不同于其他学生社团。提前把纪律搬出来是非常有必要的,原则性的东西。
把这帮只有一腔热血的小白变成一个个技术大牛就必须要通过一些比赛来锻炼他们。这是2013年我想了好久的,如果简简单单的让新队员进来之后仅仅跟着老队员一起学习的话那么就是没有啥压力的学习,基本上也是在整体打酱油,只有给他们确定一个明确的项目让他们做一做才能振奋人心。我觉得巡迹小车比赛是非常好的,能够初步的建立起控制的一些简单的看法,机械结构上也很简单,效果是非常直观的,谁做的车子跑的好跑得快那大家都是知道的,也就不存在像某某创新大赛那种坑爹的评审情况了。当然要搞个这样的一个培训项目还不是学生能够决定的,必须要和带队老师沟通好诸如经费以及场地的问题。
2013年那个内部的小车比赛准备的比较仓促,前前后后基本上也就是我一个人再张罗这件事,准备工作没有做好,以至于队员没有玩high。不过刚起步吗,难免会看着比较艰苦的样子。最后发现这么一批人真的很有战斗力,顿时感到那几千块钱的投资没有白费。
以后的队员培训希望能够加入一些老队员讲话与老师演讲的一些内容,因为好多老队员和老师都是在学校的,是非常好的资源。
我参加了三年的ROBOCON,亲眼见证了这三年来SPR的发展,前两年基本上没有人回去关注制度的问题,管理方面基本是非常松散的。2012年,一帮师兄的的确确是想把事情干好,带着我们这些师弟一起研究,是那种氛围将大家紧紧的团结到一块了,所以2012年的车子做的还是可以的,在家里就能完成全部任务,正式场地由于央视增加视觉拍摄效果刷漆导致导致场地打滑以至自动机器人带着采集机器人上坡的时候摔倒没有成功,但这都是后事了,起码我们心中有遗憾。2013年,基本上是零起步,要不是石工大神辉哥及时加入,那后果……一个机械负责人和新来的女队员谈恋爱去了,另外一个机械组负责人准备出国去了,队长去干财务的活去了,一帮人在实验室做饭(我也在内),搞的实验室全是菜的味道,你敢相信么。就这样的队伍,结果是可想而知的。我觉得以后就不要招女队员了,有女队员的那几年全都没有进十六强。
终于我们开始提出了制度与管理上的问题。虽然一些老队员在抱怨没有一个电科东北北科那样专职的老师来管我们,我们的老师基本上也是几个月来一次,最后一个月过来骂骂大家,陪着我们去比赛,然后当着大庭广众骂。但是我觉得这不是问题,有这样的老师基本上已经非常幸福了,华科哈工都是没有老师的。张老师带了比赛十年了,也非常幸苦,加上身体不好,所以大家更应该怀着一颗感恩的心去面对老师。有人再抱怨学校的政策不好,就一个综合测评加分,而且做ROBOCON比赛的加分竟然和机械创新那种挣钱额比赛加的分是一样的。想想其他好多学校连加分都没有我就不说了。最坑的是什么,与比赛冲突的考试,办个缓考只能是六十分,哎,我只能说大家接受这个校情吧,跟教务处老师磨破嘴皮子是没有用的,因为这是校情!
我大二大三都在团队呆过,也知道作为低年级同学的艰难。学习任务特别繁重,也不忍心给他们提出影响学习的苛刻条件,每年招新之后梯队队员还是很多很丰富的,我们能够给他们的,没有什么,能够让他们坚持下来的,也没有什么,最后的最后,只是理解和理解。而自己内心有感情想为比赛付出的,会留下来的。这样的一个过程,最后没有留下来的,或者留下来的一个,对梯队对团队对学校对比赛,都是最好的。感谢今年一起走过的一帮兄弟们!
我觉得每个想加入SPR的人都会对机器人有那么点兴趣,而管理者需要去发觉他们,引导大家去探索发现新的知识,有那么个过程是非常重要的。不要老羡慕别的学校是多么牛叉,你要知道,我们可是石油系统中的黄埔军校呢,亚洲第一,自信点。
制度上我觉得应该向哈工大学习,哈工大机器人队完全就是按照一个创业公司的模式来运作的。没有指导老师,由师兄来管。平时接一些小项目赚点零花钱,总比去勤工助学浪费时间要好。其实怎么说呢,如果你在机器人队这样的项目组都干不好,你就不要指望着以后去什么大公司了。
目标规划与考勤上,想真正从事机器人技术研究的人要懂得安排自己的时间,但是从2014年好几次的管理模式尝试的基础上,我觉得确定一个短期的目标是相当重要的,当然前提大家要提前规划好长期的目标。因为有些人肯定还有别的事情的,不可能一天到晚全都泡在机器人实验室,只要在规定期限内完成就行了。
机械设计技术开发
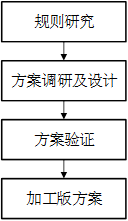
ROBOCON每年都会有不一样的主题,需要机器人完成某些任务,对应的机构设计会经过以下三个过程,国内强队一般是机械实验做了几百次的,车子出了好多代,没有那个学校只做了一代就很牛逼的,至少我是没见过。RoboMasters也是一样,相比较开始的比赛,后面的比赛中越来越加入了队伍自己设计的元素,机械设计上有很大的创造空间。比如2015年的哨兵机器人,2016年的英雄车,2017年的工程机器人。
设计原则,稳,准,快,尽量使用分立机构。需要将任务一个个分解,找出对应的实现机构,当然实现某个任务的机构真的是太多了,这时候你需要综合加工及这种机构的寿命等因素去合理选择机构。还有非常重要的一点是注意各个机器人的协调,各个机器人的机构之间是有关联的,这要依据比赛规则及过程细细的研究。能够在机械上解决的问题就不要留给控制了,比如说机械辅助定位等措施。
2014年我们到比赛场地一看,大家都惊呆了,其他学校的方案我们都想过了,东大的涵道旋转,北交、北邮、哈工等学校的直线方案,这都是我们提出过并且是做了实验的,但是为什么没有他们做的好呢(这里的好体现在实现任务稳定,快速上)。我觉得问题还是方案讨论这一环节大家没有去认真的思考问题,没有仔细的想过某种方案的优缺点,同时在实验失败的基础上没有认真总结,缺少理论分析。还有一点我觉得是非常重要的,就是画图能力,如果你在做一个实验或者做一个机构之前连一个详细的图(二维或者三维都可以)都没有,那么就是你没有构思好,只是你一个人知道该怎么办,也无法与别人交流。今年犯了一个大错就是太依赖手工制作了,有图纸就乱磨几下就可以了。虽说这是一种工程思维,但我想说的是你得有一个大的设计图纸啊。你图里的有些零件没有现成的,时间又很紧,那么你可以按照实际情况去简化图里的设计去自己制作。严禁走一个算一步的设计思想,那不是搞机械的,是不负责任的表现。
理论分析能力同样是机构设计过程中所需要的,不要以为队里搞机械的就是干苦力的,机械本来就是一门非常精深的学问,设计到力学方面的好多知识。你的机械参数设计的好不好直接影响到机器人的运行效果,参数不好,程序怎么调都可能调不出来。所以机构设计要有计算,要有理论支持!只有小学生才会搞一些刚刚好没有计算的东西!
专业知识学习:静力学,动力学,材料力学,机械制造、机械机构原理,机械设计
典型软件应用: Solidworks—零件图建模、装配图配合、工程图标注转化
AutoCAD—看图、画图,机械加工基本标注方法掌握
Adams、Ansys—动力学、运动学、强度校核
CAXA—机械加工过程学习
Solidworks现在的功能已经很强大,结合实际加工过程,队员要掌握好如何将轮廓生成dxf/dwg格式文件,如何将solidworks文件打包与人分享,如何进行钣金件的设计,如何进行焊接件的设计,如何进行静力学分析,如何队关键部位进行强度校核等。总之,solidwoks用的溜的话,画起图来会更加得心应手。
典型机构研究: 转动机构(止推轴承等应用,间隙要小),
直线机构(直线导轨,直线轴承的应用,非标滑块的设计),发射机构(弹簧发射、皮筋发射、摩擦轮发射、气动发射)
我一般看一个结构设计的怎么样,往往特别关注它的转动部分和直线部分,这两部分如果很晃动,那绝对是精度是非常糟糕的。一个好的结构如果在转动副和滑动副这两个地方做的精细的画,整体的稳定性会得到极大的提高。
典型传动研究: 同步带传动
齿轮传动、连杆传动
滑轮拉线传动(二级、三级电机拉线、气缸拉线)特别有用
典型技能掌握:各种材料打孔(转速的掌握),角磨机的使用,钢锯的使用,
各类普通串联机构的设计:复位机构、自锁机构、连杆机构、平行四边形等各类实用机构研究
并联机构的开发:并联机械手。
麦克纳姆轮底盘设计:减震机构,拖地码盘架模块(直角、120度)。
气动技术研究:各类普通气缸、旋转气缸、无杆气缸、真空吸盘等气动技术的应用;
电机知识学习与选型:直流有刷电机,直流无刷电机(转矩、转速、效率等)。
材料运用:不锈钢、铝合金、电木、环氧树脂板(黄色和黑色的)、碳纤维板、亚克力板,POM,ABS,尼龙,UPE等各类工程塑料等材料性能了解与应用。
加工工艺研究:焊接技术(铝焊、不锈钢焊接),3D打印技术。
各大高校图纸研究:研究往年比赛视频及高校提供的图纸。
我认为电控组的队员除了有C语言基础外,还要有一定的电路、自动控制原理的专业知识。要善于从各大网站论坛上获取知识,多看书,要善于做实验,多调试调试往年的机器人底盘,平时多做点小玩意。电控要做的其实就是一个怎么读取传感器数据(数据采集),数据怎么处理(算法)的问题。
在定位方面我们做的不好,包括全场定位和目标识别定位方面,用到的传感器太少了,而且用的不好,而且算法也不是很好,理论基础太差。但是这些东西又有什么难的呢,为什么别的学校的同学能够搞出来,不要找借口,完全是自己没有认认真真去研究的么!
研究机器人算法,如PID控制算法、机器人全场定位算法、滤波算法,这些理论知识一定要清楚,要跟别人解释起来要能说清楚。这个在中国知网和万方数据库中查阅电子科技大学、东北大学等有关机器人控制的毕业论文进行学习。
电路pcb设计方面得加强,年年绑个开发板也不是个事,软件Altium designer,建议回归ARM+FPGA的架构。
接线及线头得规范化(考虑考虑用molex接线元件)
研究摄像头的定位,识别等技术,继陀螺仪之后貌似SPR没有大的技术突破了,推荐书籍《数字图像处理》、《机器视觉算法与应用》、《OpenCV中文版》
陀螺仪飘的问题解决
了解比较靠谱的测距传感器,激光、超声波等
尽量做成分布式MCU,用CAN通信
OLED显示的应用;
无线通讯的研究(wifi,2.4G,蓝牙等),显然2015年的比赛肯定会用到
仔细研究各大高校参赛视频、照片、机构图,我听说太工的队员放假就研究牛逼学校的图纸,自己再画一遍。
认真关注ROBOCON 的QQ群消息,多与坑友们交流,那里面可都是全国的大神啊。那么好的资源不用,浪费!
加强北京地区的高校交流,多到北交、北邮、北科那几个学校机器人实验室转转,老在学校呆着多无聊,出去看看别的学校的学生是怎么搞机器人的,莫要闭门造车。
不得不说今年的采购与财务这一块没有管理好,这一点我是深有体会,自己砸了好多钱不知道!财务必须要专门人来管,流程如图。每次报账完都要有个记录(电子版和纸质版)
找东西在实验室可是个大问题,曾经流传着一句经典的话"来九楼三个小时,就有一个小时在找东西!"的确,在比赛准备期间想必大家也体会到了,所以把一些工具收拾好了就能解决很多问题,后期按照责任制,将一些固定资产的管理分到每一个人身上。具体分类视人数情况还可以再调整。
感谢一路走来给予支持和帮助的老师同学朋友,谢谢,祝大家前程似锦!
我的大学,我的SPR机器人队的更多相关文章
- 北理工机器人队RM视觉组学习参考汇总(持续更新中)
欢迎大家有意加入北理工机器人队参与到视觉组的工作中.在大家能够正式作为队员参与到视觉组的准备工作之前,北理机器人队需要对各位进行培训.这篇文章主要面向有志于参加机器人队视觉组的同学.同时,欢迎所有对相 ...
- 2022徐特立科学营&BIT机器人队电控课程讲义
目录 \(\cdot\)电控简介 \(\cdot\)认识单片机 什么是单片机 时钟-单片机的脉搏 \(\cdot\)外设及应用 GPIO PWM 定时器 UART \(\cdo ...
- 北理工机器人队RM视觉组ubuntu必备软件安装指南
基础软件安装 sudo apt update && sudo apt upgrade sudo apt install git curl vim gcc g++ cmake与make ...
- 使用IR2104S搭建的H桥-机器人队比赛经典版(原作者答疑)
原理图地址:http://bbs.ednchina.com/BLOG_ARTICLE_3020313.HTM?click_from=8800020962,4950449047,2014-05-01,E ...
- ROS会议 ROSCon 2017
----ROSCon2012-2017----来源链接:https://roscon.ros.org 近三年ROSCon(2015-2017)都会将会议视频录像和文档公开~以下为机 ...
- 写在归程路上——2018ROBOCUP机器人世界杯中国赛
写入自强队名单一年,认识Daniel十个月,第二次代表上海大学参加国赛,这一次是在浙江绍兴.坐在返沪的车上,心里担心着作业和明天的早课,写这篇博文来打发打发时间. ROBOCUP两个半比赛日,项目主要 ...
- [置顶] 博客停止更新 && 我的大学数年
博客停止更新 前言: 这些天,一直还没有时间发表这篇博文,近期,做了一个决定:博客更新停止. 我有话说: 这些天来,还真是感谢大家的关注了.从2011年的07至今,2013年的07月,两个年头,写下了 ...
- bzoj千题计划230:bzoj3205: [Apio2013]机器人
http://www.lydsy.com/JudgeOnline/problem.php?id=3205 历时一天,老子终于把它A了 哈哈哈哈哈哈哈哈哈哈哈哈哈哈哈哈哈哈哈哈哈哈哈哈 因为不懂spfa ...
- 蓝桥杯第七届决赛(国赛)C++B组 第四题 机器人塔
机器人塔 X星球的机器人表演拉拉队有两种服装,A和B.他们这次表演的是搭机器人塔. 类似: A B B A B A A A B B B B B A BA B A B B A 队内的组塔规则 ...
随机推荐
- SQL Server进阶(十一)可编程对象——变量、 批、流元素、 游标
变量 --------------------------------------------------------------------- -- Variables -------------- ...
- Java时间转换的一个特性
SimpleDateFormat simpleDateFormat = new SimpleDateFormat("yyyy-MM-dd HH:mm"); Date codedat ...
- Chimee - 简单易用的H5视频播放器解决方案
Chimee是由奇舞团开源的一套H5视频播放器解决方案,由奇舞团视频云前端团队结合在业务和视频编解码方向的沉淀积累倾心打造.Chimee支持MP4.M3U8.FLV等多种媒体格式,同时它也帮我们解决了 ...
- IPv6地址测试宏
- MobX响应式编程库
MobX https://mobx.js.org/ https://github.com/mobxjs/mobx MobX is a battle tested library that makes ...
- Generic XXE Detection
参考连接:https://www.christian-schneider.net/GenericXxeDetection.html In this article I present some tho ...
- Jupyter 同时支持python2, python3
从docker hub 下载了一个 tensorFlow 镜像,但是里面只支持python2.7 kernel, 不支持python3 kernel. 1. Notebook的右上角点new 只看到 ...
- KMP模板(HDU1711)
#include<stdio.h> #include<math.h> #include<string.h> #include<stack> #inclu ...
- mui的switch开关的应用
HTML: <!--mui的switch开关--> <div class="mui-content-padded"> <h5>switch开关m ...
- LinkedHashMap实现LRU缓存算法
LinkedHashMap的get()方法除了返回元素之外还可以把被访问的元素放到链表的底端,这样一来每次顶端的元素就是remove的元素. 构造函数如下: public LinkedHashMap ...