Autoware 笔记 No. 5——基于GNSS的定位
1. 前言
在之前的笔记No.2 中,我们直接采用ndt_matching的方法实现定位,但需要在打开rviz中,通过2D Pose Estimate指定初始位置。加入GNSS后,可以帮助ndt_matching找到初始位置,同时如果ndt_matching在运动过程中匹配失败,GNSS可以帮助重定位。
在/ndt_matching算法中,有两个条件使用GNSS重定位:
(1) 如果设置ndt_matching的config中设置了GNSS,而非Initial Pos,那么ndt_matching会在程序初始运行中采用GNSS作为初值;
(2) 在车辆运行过程中,当topic /ndt_stat中的score值大于600(与地图匹配程度,值越大匹配的越差),同样会使用GNSS重定位。
下面介绍干货
2. GNSS读入数据配置
我们采用某品牌的GNSS设备,通过串口读入信息,所以首先在Autoware中设置为串口读入,如下图:

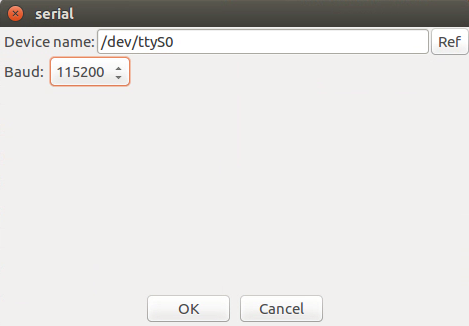
首先配置GNSS下的Serial GNSS的config,我们的串口GNSS设备的设备名称为/dev/ttyS0,波特率为115200,设置成功后,点击OK保存,然后点击Serial GNSS选项,这时会提示错误:
ERROR: cannot launch node of type [nmea_navsat_driver/nmea_topic_serial_reader]: nmea_navsat_driver
ROS path []=/opt/ros/kinetic/share/ros
ROS path []=/home/a/autoware/ros/src
ROS path []=/home/a/catkin_ws/src
ROS path []=/opt/ros/kinetic/share
ERROR: cannot launch node of type [nmea_navsat_driver/nmea_topic_driver]: nmea_navsat_driver
ROS path []=/opt/ros/kinetic/share/ros
ROS path []=/home/a/autoware/ros/src
ROS path []=/home/a/catkin_ws/src
ROS path []=/opt/ros/kinetic/share
这时由于Autoware中的串口驱动没有装,根据autoware/ros/src/sensing/drivers/gnss/packages/nmea_navsat/scripts/README.md文件,需要下载驱动,运行
$ sudo apt-get install ros-kinetic-nmea-navsat-driver
如果不能更新,也可以从源码下载,然后在autoware的工作空间下安装,源码的下载地址为:https://github.com/ros-drivers/nmea_navsat_driver.git,下载后切换到适合的kinetic分支即可运行。
这时在勾选Serial GNSS选项,通过查看topic /nmea_sentence,如果有输出,且在sentence中有内容,即GNSS设备数据读取成功。/nmea_sentence的数据内容:
---
header:
seq:
stamp:
secs:
nsecs:
frame_id: "/gps"
sentence: "$×××××,0,7847.600,360.000,1.663,0.720,0.0000000,0.0000000,0.00,0.000,0.000,0.000,0.000,0,0,0C*0C"
$*****代表nmea的标准,主流的标准有$GPGGA、$GPGSA、$GPGSV、$GPRMC、$GPVTG、$GPGLL。而我们采用的传感器不是这些标准,所以需要自己写nmea的数据解析。
不同的GNSS设备,sentence的中内容的标准会有不同。
如果想了解nmea,请参考博客:https://blog.csdn.net/jickjiang/article/details/79086202
3. 数据解析
Autoware的数据解析程序为nmea2tfpose包,由于我们采用的设备不是标准协议,但我们的协议和$GPGGA很接近,所以我们采用在$GPGGA的基础上做了改进nmea2tfpose_core.cpp。
我们的修改思路为:
(1) 首先讲基站的经纬度作为原点;
(2) 采用$GPGGA的方式,将经纬度坐标系映射到以基站为原点的平面坐标系;
(3) 通过tf变换,将基站为原点的坐标系的转换到地图坐标系。
我们没有修改源码,而是将nmea2tfpose包拿出来修改,编译,然后单独发布。
nmea2tfpose包最终发布的topic为/gnss_pose。查看/gnss_pose与/ndt_pose发布的数据是否基本一致,如果基本一致,那么成功。这里我公布出部分源码,供大家参考(nmea2tfpose_core.cpp):
// 设置基站经纬度
geo_.set_origin(longitude_, latitude_);
if (nmea.at() == "$×××××") //heading pitch roll
{
// 直接读取gnss中的roll, pitch, yaw
position_time_ = stod(nmea.at());
roll_ = stod(nmea.at()) * M_PI / .;
pitch_ = - * stod(nmea.at()) * M_PI / .;
yaw_ = -stod(nmea.at()) * M_PI / . + M_PI*; //ROS_INFO("roll:%f, pitch:%f, yaw:%f.", roll_,pitch_,yaw_); // 根据GPGGA计算从经纬度到局部坐标系的映射
double lat = stod(nmea.at());
double lon = stod(nmea.at());
double h = stod(nmea.at());
geo_.set_llh_nmea_degrees(lat, lon, h);
}
// 基站为原点坐标系到地图坐标系的变换
tf::Pose tf_pose;
tf::poseMsgToTF(pose.pose, tf_pose);
tf::Quaternion q;
q.setRPY(, , 3.2277); // 基站为原点坐标系与地图坐标系夹角
tf::Transform tf_trans(q, tf::Vector3(-28.11, 10.79, )); // 基站为原点坐标系与地图坐标系原点的差
tf_pose = tf_trans.inverse() * tf_pose;
tf::poseTFToMsg(tf_pose, pose.pose);
4. 结果
上面的代码完成后,可以按照Autoware 笔记4的内容进行设置,这时无论车停在轨迹上的任何位置,可以直接找到位置,无需2D Pose Estimate指定初始位置。
Autoware 笔记 No. 5——基于GNSS的定位的更多相关文章
- 驱动开发学习笔记. 0.02 基于EASYARM-IMX283 烧写uboot和linux系统
驱动开发读书笔记. 0.02 基于EASYARM-IMX283 怎么烧写自己裁剪的linux内核?(非所有arm9通用) 手上有一块tq2440,但是不知道什么原因,没有办法烧boot进norflas ...
- Autoware 培训笔记 No. 2——基于点云的定位
1. 前言 构建出地图后,应该测试点云地图定位效果,这里用到ndt的scan_matching方法,这是一种scan-to-map方法.这里用的是我们自己采集的数据进行仿真. 本章内容有和No. 1重 ...
- python appium笔记(二):元素定位
#这里的示例是用android来说明的,xpath应该是通用的,resource-id不太清楚,没配过IOS的环境 #环境配置和一些参数的意思不清楚可以看我上一篇python appium笔记(一) ...
- Python+Selenium笔记(六):元素定位
(一) 前言 Web应用以及包含超文本标记语言(HTML).层叠样式表(CSS).JS脚本的WEB页面,基于用户的操作(例如点击提交按钮),浏览器向WEB服务器发送请求,WEB服务器响应请求,返 ...
- ROS学习笔记八:基于Qt搭建ROS开发环境
1 前言 本文介绍一种Qt下进行ROS开发的完美方案,使用的是ros-industrial的Levi-Armstrong在2015年12月开发的一个Qt插件ros_qtc_plugin,这个插件使得Q ...
- (2)《Head First HTML与CSS》学习笔记---img与基于标准的HTML5
1.浏览器处理图像的过程: 1.服务器获取文件,显示出文本结构,以及预留默认的大小给<img>(如果该<img>有width-1值和height-1值,则根据这个值提前设好页面 ...
- (一)学习了解OrchardCore笔记——开篇:基于asp.net core的OrchardCore
想深入了解OrchadCore源码许久了,但是读源码的时候遇到很多问题而网上的参考资料太少了(几乎都是OrchadCms不带OrchardCore的),现在解决得差不多了,做下笔记方便自己查看,有错误 ...
- 【读书笔记】《基于UG NX系统的二次开发》笔记
我有几本二次开发的书,但是从头到尾读下来的却没有几本.有时候遇到困难发帖求助,好不容易得到答案.后来却发现在书上的前几章就有详细介绍.读书笔记不仅是一种记录,更是一种督促自己读书的方法.还有一个原因是 ...
- Django笔记&教程 7-1 基于类的视图(Class-based views)介绍
Django 自学笔记兼学习教程第7章第1节--基于类的视图(Class-based views)介绍 点击查看教程总目录 1 介绍 Class-based views (CBVs) are view ...
随机推荐
- swoole的process模块创建和使用子进程
swoole中为我们提供了一个进程管理模块 Process,替换PHP的 pcntl 扩展,方便我们创建进程,管理进程,和进程间的通信. swoole提供了2种进程间的通信: 1.基于 unix so ...
- pandas 学习 第6篇:DataFrame - 数据处理(长宽格式、透视表)
长宽格式的转换 宽格式是指:一列或多列作为标识变量(id_vars),其他变量作为度量变量(value_vars),直观上看,这种格式的数据比较宽,举个列子,列名是:id1.id2.var1.var2 ...
- sql server pivot
SET ANSI_NULLS ON GO SET QUOTED_IDENTIFIER ON GO CREATE TABLE [dbo].[YearSalary]( [year] [int] NULL, ...
- c# 字符串中全角和半角字符互转
public class ConvertDBCAndSBC { /// <summary>半角转成全角 /// 半角空格32,全角空格12288 /// 其他字符半角33~126,其他字符 ...
- Fiddler 插件开发,使用 WPF 作为 UI 控件
Fiddler 插件的 UI,本身使用的 WinForm,这个例子是使用 WinForm 中的 WPF 容器,将 WPF 控件作为 Fiddler 插件的 UI 使用. 为什么使用 WPF ?为了自适 ...
- C# - VS2019页面布局容器splitContainer和groupBox小结
前言 在WinFrm应用程序中,产品的外观.布局将直接影响用户第一体验,所以对于开发者来说,在没有美工支持的前提下,应当注意系统页面的布局,本章主要讲解splitContainer和groupBox的 ...
- numpy 和 tensorflow 中的各种乘法(点乘和矩阵乘)
点乘和矩阵乘的区别: 1)点乘(即" * ") ---- 各个矩阵对应元素做乘法 若 w 为 m*1 的矩阵,x 为 m*n 的矩阵,那么通过点乘结果就会得到一个 m*n 的矩阵. ...
- Prometheus+Grafana监控MySQL、Redis数据库
俗话说,没有监控的系统就是在裸奔,好的监控就是运维人员的第三只手,第三只眼.本文将使用prometheus及Grafana搭建一套监控系统来监控主机及数据库(MySQL.Redis). 1. 安装G ...
- MySQL数据库无法使用+号连接字符串的处理方法
转自:http://www.maomao365.com/?p=10003 摘要: 下文讲述MySQL数据库,字符串连接的方法分享,如下所示:实现思路: 使用concat函数对两个字符串进行连接在MyS ...
- c++ 多态的内幕
c++ 多态,就是利用了一个二级指针(指针数组),数组里的每个元素都指向了,用virtual修饰的成员函数. 既然提到了指针,那就让我们用内存地址来证明一下吧. 为了证明,我们必须要取到成员函数的首地 ...