TensorFlow Object Detection API中的Faster R-CNN /SSD模型参数调整
关于TensorFlow Object Detection API配置,可以参考之前的文章https://becominghuman.ai/tensorflow-object-detection-api-tutorial-training-and-evaluating-custom-object-detector-ed2594afcf73
在本文中,我将讨论如何更改预训练模型的配置。本文的目的是您可以根据您的应用程序配置TensorFlow/models,而API将不再是一个黑盒!
本文的概述:
- 了解协议缓冲区和
proto文件。 - 利用
proto文件知识,我们如何了解模型的配置文件 - 遵循3个步骤来更新模型的参数
- 其他示例:
- 更改重量初始值设定项
- 更改体重优化器
- 评估预训练模型
协议缓冲区
要修改模型,我们需要了解它的内部机制。TensorFlow对象检测API使用协议缓冲区(Protocol Buffers),这是与语言无关,与平台无关且可扩展的机制,用于序列化结构化数据。就像XML规模较小,但更快,更简单。API使用协议缓冲区语言的proto2版本。我将尝试解释更新预配置模型所需的语言。有关协议缓冲区语言的更多详细信息,请参阅此文档和Python教程。
协议缓冲区的工作可分为以下三个步骤:
- 在
.proto文件中定义消息格式。该文件的行为就像所有消息的蓝图一样,它显示消息所接受的所有参数是什么,参数的数据类型应该是什么,参数是必需的还是可选的,参数的标记号是什么,什么是参数的默认值等。API的protos文件可在此处找到。为了理解,我使用grid_anchor_generator.proto文件。 syntax = "proto2"; package object_detection.protos; // Configuration proto for GridAnchorGenerator. See
// anchor_generators/grid_anchor_generator.py for details.
message GridAnchorGenerator {
// Anchor height in pixels.
optional int32 height = 1 [default = 256]; // Anchor width in pixels.
optional int32 width = 2 [default = 256]; // Anchor stride in height dimension in pixels.
optional int32 height_stride = 3 [default = 16]; // Anchor stride in width dimension in pixels.
optional int32 width_stride = 4 [default = 16]; // Anchor height offset in pixels.
optional int32 height_offset = 5 [default = 0]; // Anchor width offset in pixels.
optional int32 width_offset = 6 [default = 0]; // At any given location, len(scales) * len(aspect_ratios) anchors are
// generated with all possible combinations of scales and aspect ratios. // List of scales for the anchors.
repeated float scales = 7; // List of aspect ratios for the anchors.
repeated float aspect_ratios = 8;
}它是从线30-33的参数明确
scales,并aspect_ratios是强制性的消息GridAnchorGenerator,而参数的其余部分都是可选的,如果不通过,将采取默认值。- 定义消息格式后,我们需要编译协议缓冲区。该编译器将从文件生成类
.proto文件。在安装API的过程中,我们运行了以下命令,该命令将编译协议缓冲区: # From tensorflow/models/research/
protoc object_detection/protos/*.proto --python_out=.- 在定义和编译协议缓冲区之后,我们需要使用Python协议缓冲区API来写入和读取消息。在我们的例子中,我们可以将配置文件视为协议缓冲区API,它可以在不考虑TensorFlow API的内部机制的情况下写入和读取消息。换句话说,我们可以通过适当地更改配置文件来更新预训练模型的参数。
了解配置文件
显然,配置文件可以帮助我们根据需要更改模型的参数。弹出的下一个问题是如何更改模型的参数?本节和下一部分将回答这个问题,在这里
proto文件的知识将很方便。出于演示目的,我正在使用faster_rcnn_resnet50_pets.config文件。# Faster R-CNN with Resnet-50 (v1), configured for Oxford-IIIT Pets Dataset.
# Users should configure the fine_tune_checkpoint field in the train config as
# well as the label_map_path and input_path fields in the train_input_reader and
# eval_input_reader. Search for "PATH_TO_BE_CONFIGURED" to find the fields that
# should be configured. model {
faster_rcnn {
num_classes: 37
image_resizer {
keep_aspect_ratio_resizer {
min_dimension: 600
max_dimension: 1024
}
}
feature_extractor {
type: 'faster_rcnn_resnet50'
first_stage_features_stride: 16
}
first_stage_anchor_generator {
grid_anchor_generator {
scales: [0.25, 0.5, 1.0, 2.0]
aspect_ratios: [0.5, 1.0, 2.0]
height_stride: 16
width_stride: 16
}
}
first_stage_box_predictor_conv_hyperparams {
op: CONV
regularizer {
l2_regularizer {
weight: 0.0
}
}
initializer {
truncated_normal_initializer {
stddev: 0.01
}
}
}
first_stage_nms_score_threshold: 0.0
first_stage_nms_iou_threshold: 0.7
first_stage_max_proposals: 300
first_stage_localization_loss_weight: 2.0
first_stage_objectness_loss_weight: 1.0
initial_crop_size: 14
maxpool_kernel_size: 2
maxpool_stride: 2
second_stage_box_predictor {
mask_rcnn_box_predictor {
use_dropout: false
dropout_keep_probability: 1.0
fc_hyperparams {
op: FC
regularizer {
l2_regularizer {
weight: 0.0
}
}
initializer {
variance_scaling_initializer {
factor: 1.0
uniform: true
mode: FAN_AVG
}
}
}
}
}
second_stage_post_processing {
batch_non_max_suppression {
score_threshold: 0.0
iou_threshold: 0.6
max_detections_per_class: 100
max_total_detections: 300
}
score_converter: SOFTMAX
}
second_stage_localization_loss_weight: 2.0
second_stage_classification_loss_weight: 1.0
}
} train_config: {
batch_size: 1
optimizer {
momentum_optimizer: {
learning_rate: {
manual_step_learning_rate {
initial_learning_rate: 0.0003
schedule {
step: 900000
learning_rate: .00003
}
schedule {
step: 1200000
learning_rate: .000003
}
}
}
momentum_optimizer_value: 0.9
}
use_moving_average: false
}
gradient_clipping_by_norm: 10.0
fine_tune_checkpoint: "PATH_TO_BE_CONFIGURED/model.ckpt"
from_detection_checkpoint: true
# Note: The below line limits the training process to 200K steps, which we
# empirically found to be sufficient enough to train the pets dataset. This
# effectively bypasses the learning rate schedule (the learning rate will
# never decay). Remove the below line to train indefinitely.
num_steps: 200000
data_augmentation_options {
random_horizontal_flip {
}
}
max_number_of_boxes: 50
} train_input_reader: {
tf_record_input_reader {
input_path: "PATH_TO_BE_CONFIGURED/pet_train.record"
}
label_map_path: "PATH_TO_BE_CONFIGURED/pet_label_map.pbtxt"
} eval_config: {
num_examples: 2000
# Note: The below line limits the evaluation process to 10 evaluations.
# Remove the below line to evaluate indefinitely.
max_evals: 10
} eval_input_reader: {
tf_record_input_reader {
input_path: "PATH_TO_BE_CONFIGURED/pet_val.record"
}
label_map_path: "PATH_TO_BE_CONFIGURED/pet_label_map.pbtxt"
shuffle: false
num_readers: 1
}第7至10行表示这
num_classes是faster_rcnnmessage 的参数之一,而后者又是message的参数model。同样,optimizer是父train_config消息的子消息,而message的batch_size另一个参数train_config。我们可以通过签出相应的protos文件来验证这一点。syntax = "proto2"; package object_detection.protos; import "object_detection/protos/anchor_generator.proto";
import "object_detection/protos/box_predictor.proto";
import "object_detection/protos/hyperparams.proto";
import "object_detection/protos/image_resizer.proto";
import "object_detection/protos/losses.proto";
import "object_detection/protos/post_processing.proto"; // Configuration for Faster R-CNN models.
// See meta_architectures/faster_rcnn_meta_arch.py and models/model_builder.py
//
// Naming conventions:
// Faster R-CNN models have two stages: a first stage region proposal network
// (or RPN) and a second stage box classifier. We thus use the prefixes
// `first_stage_` and `second_stage_` to indicate the stage to which each
// parameter pertains when relevant.
message FasterRcnn { // Whether to construct only the Region Proposal Network (RPN).
optional int32 number_of_stages = 1 [default=2]; // Number of classes to predict.
optional int32 num_classes = 3; // Image resizer for preprocessing the input image.
optional ImageResizer image_resizer = 4;从第20行和第26行可以明显看出,这
num_classes是optional消息的参数之一faster_rcnn。我希望到目前为止的讨论有助于理解配置文件的组织。现在,是时候正确更新模型的参数之一了。步骤1:确定要更新的参数
假设我们需要更新fast_rcnn_resnet50_pets.config文件的
image_resizer第10行中提到的参数。步骤2:在存储库中搜索给定参数
目标是找到
proto参数文件。为此,我们需要在存储库中搜索。
我们需要搜索以下代码:
parameter_name path:research/object_detection/protos
#in our case parameter_name="image_resizer" thus,
image_resizer path:research/object_detection/protos在此
path:research/object_detection/protos限制搜索域。在此处可以找到有关如何在GitHub上搜索的更多信息。搜索的输出image_resizer path:research/object_detection/protos如下所示:
从输出中很明显,要更新
image_resizer参数,我们需要分析image_resizer.proto文件。步骤3:分析
proto档案syntax = "proto2"; package object_detection.protos; // Configuration proto for image resizing operations.
// See builders/image_resizer_builder.py for details.
message ImageResizer {
oneof image_resizer_oneof {
KeepAspectRatioResizer keep_aspect_ratio_resizer = 1;
FixedShapeResizer fixed_shape_resizer = 2;
}
} // Enumeration type for image resizing methods provided in TensorFlow.
enum ResizeType {
BILINEAR = 0; // Corresponds to tf.image.ResizeMethod.BILINEAR
NEAREST_NEIGHBOR = 1; // Corresponds to tf.image.ResizeMethod.NEAREST_NEIGHBOR
BICUBIC = 2; // Corresponds to tf.image.ResizeMethod.BICUBIC
AREA = 3; // Corresponds to tf.image.ResizeMethod.AREA
} // Configuration proto for image resizer that keeps aspect ratio.
message KeepAspectRatioResizer {
// Desired size of the smaller image dimension in pixels.
optional int32 min_dimension = 1 [default = 600]; // Desired size of the larger image dimension in pixels.
optional int32 max_dimension = 2 [default = 1024]; // Desired method when resizing image.
optional ResizeType resize_method = 3 [default = BILINEAR]; // Whether to pad the image with zeros so the output spatial size is
// [max_dimension, max_dimension]. Note that the zeros are padded to the
// bottom and the right of the resized image.
optional bool pad_to_max_dimension = 4 [default = false]; // Whether to also resize the image channels from 3 to 1 (RGB to grayscale).
optional bool convert_to_grayscale = 5 [default = false]; // Per-channel pad value. This is only used when pad_to_max_dimension is True.
// If unspecified, a default pad value of 0 is applied to all channels.
repeated float per_channel_pad_value = 6;
} // Configuration proto for image resizer that resizes to a fixed shape.
message FixedShapeResizer {
// Desired height of image in pixels.
optional int32 height = 1 [default = 300]; // Desired width of image in pixels.
optional int32 width = 2 [default = 300]; // Desired method when resizing image.
optional ResizeType resize_method = 3 [default = BILINEAR]; // Whether to also resize the image channels from 3 to 1 (RGB to grayscale).
optional bool convert_to_grayscale = 4 [default = false];
}从第8-10行可以看出,我们可以使用
keep_aspect_ratio_resizer或调整图像的大小fixed_shape_resizer。在分析行23-44,我们可以观察到的消息keep_aspect_ratio_resizer有参数:min_dimension,max_dimension,resize_method,pad_to_max_dimension,convert_to_grayscale,和per_channel_pad_value。此外,fixed_shape_resizer有参数:height,width,resize_method,和convert_to_grayscale。proto文件中提到了所有参数的数据类型。因此,要更改image_resizer类型,我们可以在配置文件中更改以下几行。#before
image_resizer {
keep_aspect_ratio_resizer {
min_dimension: 600
max_dimension: 1024
}
}
#after
image_resizer {
fixed_shape_resizer {
height: 600
width: 500
resize_method: AREA
}
}上面的代码将使用AREA调整大小方法将图像调整为500 * 600。TensorFlow中可用的各种调整大小的方法可以在这里找到。
其他例子
我们可以使用上一节中讨论的步骤更新/添加任何参数。我将在此处演示一些经常使用的示例,但是上面讨论的步骤可能有助于更新/添加模型的任何参数。
更改重量初始化器
- 决定更改fast_rcnn_resnet50_pets.config文件的
initializer第35行的参数。 initializer path:research/object_detection/protos在存储库中搜索。根据搜索结果,很明显我们需要分析hyperparams.proto文件。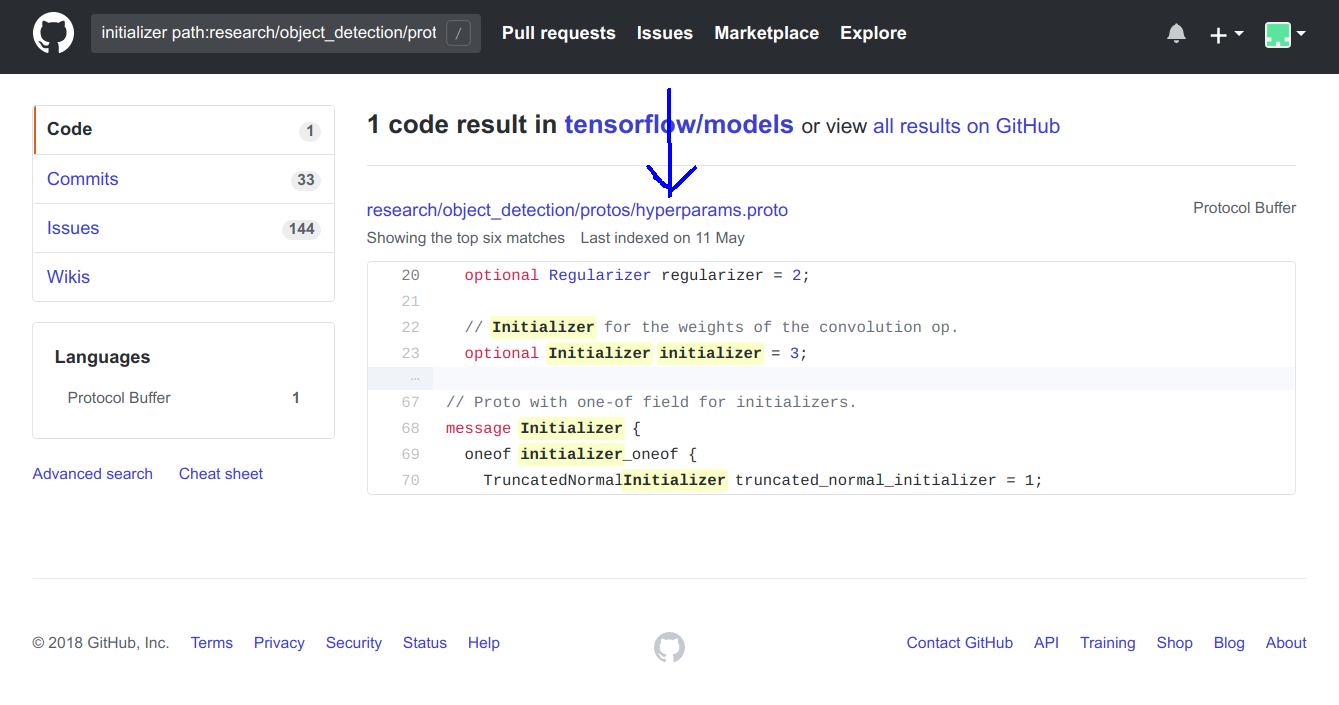
- hyperparams.proto文件中的第68–74行说明了
initializer配置。 message Initializer {
oneof initializer_oneof {
TruncatedNormalInitializer truncated_normal_initializer = 1;
VarianceScalingInitializer variance_scaling_initializer = 2;
RandomNormalInitializer random_normal_initializer = 3;
}
}我们可以使用
random_normal_intializer代替truncated_normal_initializer,因为我们需要分析hyperparams.proto文件中的第99–102行。- message RandomNormalInitializer {
optional float mean = 1 [default = 0.0];
optional float stddev = 2 [default = 1.0];
} - 显然
random_normal_intializer有两个参数mean和stddev。我们可以将配置文件中的以下几行更改为userandom_normal_intializer。 #before
initializer {
truncated_normal_initializer {
stddev: 0.01
}
}
#after
initializer {
random_normal_intializer{
mean: 1
stddev: 0.5
}
}更改体重优化器
- 决定更改faster_rcnn_resnet50_pets.config文件的第87行
momentum_optimizer的父消息的参数。optimizer optimizer path:research/object_detection/protos在存储库中搜索。根据搜索结果,很明显我们需要分析optimizer.proto文件。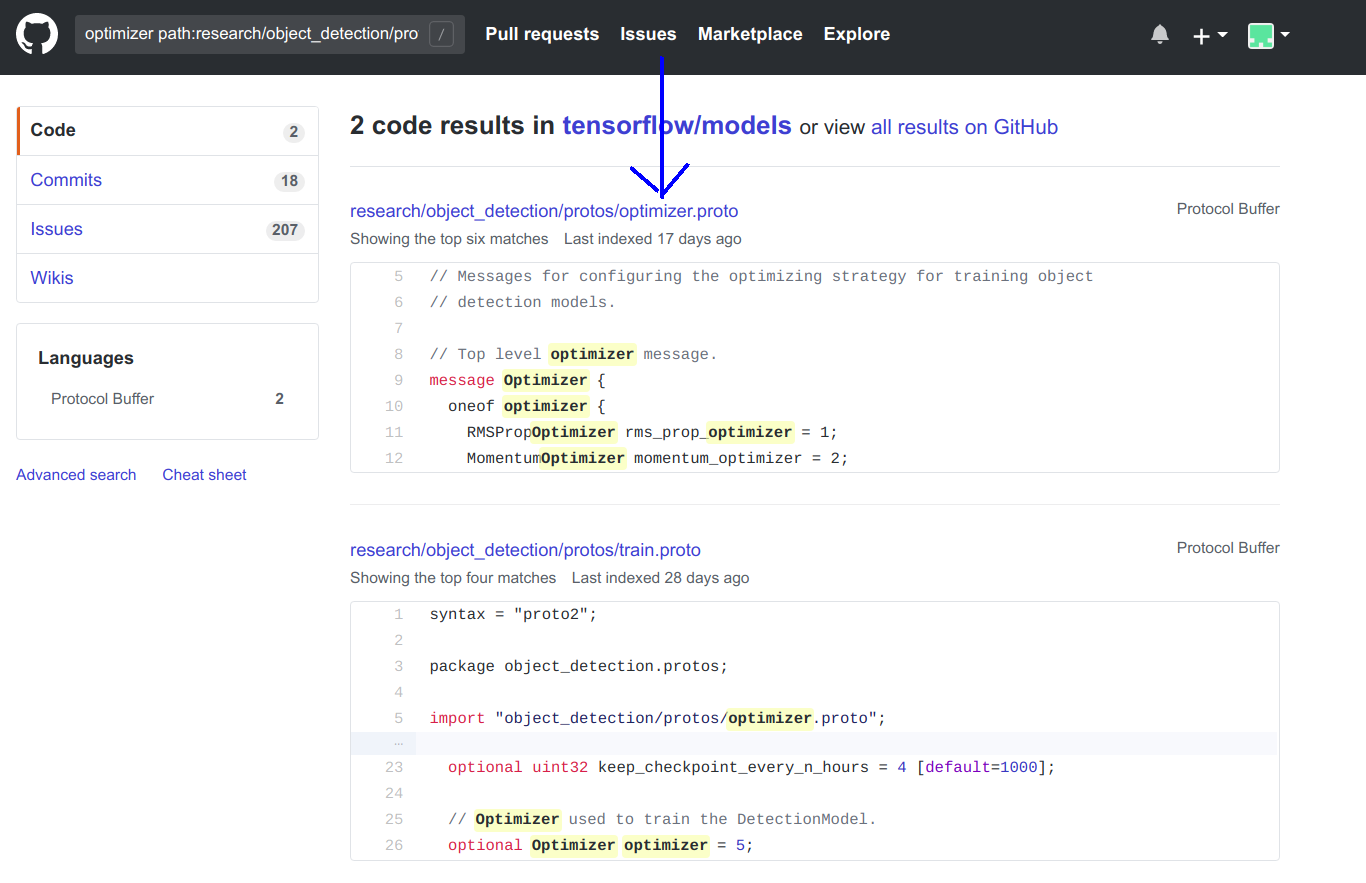
- optimizer.proto文件中的9-14行,解释
optimizer配置。
message Optimizer {
oneof optimizer {
RMSPropOptimizer rms_prop_optimizer = 1;
MomentumOptimizer momentum_optimizer = 2;
AdamOptimizer adam_optimizer = 3;
}显然,代替
momentum_optimizer我们可以使用adam_optimizer已被证明是良好的优化程序。为此,我们需要在f aster_rcnn_resnet50_pets.config文件中进行以下更改。- optimizer.proto文件中的9-14行,解释
- 决定更改faster_rcnn_resnet50_pets.config文件的第87行
#before
optimizer {
momentum_optimizer: {
learning_rate: {
manual_step_learning_rate {
initial_learning_rate: 0.0003
schedule {
step: 900000
learning_rate: .00003
}
schedule {
step: 1200000
learning_rate: .000003
}
}
}
momentum_optimizer_value: 0.9
}
#after
optimizer {
adam_optimizer: {
learning_rate: {
manual_step_learning_rate {
initial_learning_rate: 0.0003
schedule {
step: 900000
learning_rate: .00003
}
schedule {
step: 1200000
learning_rate: .000003
}
}
}
}评估预训练模型
Eval等待300秒,以检查训练模型是否已更新!如果您的GPU不错,那么您可以同时进行训练和评估!通常,资源将被耗尽。为了克服这个问题,我们可以先训练模型,将其保存在目录中,然后再评估模型。为了稍后进行评估,我们需要在配置文件中进行以下更改:
- hyperparams.proto文件中的第68–74行说明了
#Before
eval_config: {
num_examples: 2000
# Note: The below line limits the evaluation process to 10 evaluations.
# Remove the below line to evaluate indefinitely.
max_evals: 10
}
#after
eval_config: {
num_examples: 10
num_visualizations: 10
eval_interval_secs: 0
}num_visualizations应该等于要评估的数量!可视化的数量越多,评估所需的时间就越多。如果您的GPU具有足够的能力同时进行训练和评估,则可以保留eval_interval_secs: 300。此参数决定运行评估的频率。我按照上面讨论的3个步骤得出了这个结论。简而言之,协议缓冲区的知识帮助我们理解了模型参数是以消息形式传递的,并且可以更新我们可以引用的
.proto文件的参数。讨论了3个简单的步骤来找到.proto用于更新参数的正确文件。请在注释的配置文件中提及您要更新/添加的任何参数。
关注【OpenCV与AI深度学习】获得更多资讯
扫描下面二维码即可关注

- 决定更改fast_rcnn_resnet50_pets.config文件的
- 定义消息格式后,我们需要编译协议缓冲区。该编译器将从文件生成类
TensorFlow Object Detection API中的Faster R-CNN /SSD模型参数调整的更多相关文章
- Tensorflow object detection API 搭建属于自己的物体识别模型
一.下载Tensorflow object detection API工程源码 网址:https://github.com/tensorflow/models,可通过Git下载,打开Git Bash, ...
- 使用TensorFlow Object Detection API+Google ML Engine训练自己的手掌识别器
上次使用Google ML Engine跑了一下TensorFlow Object Detection API中的Quick Start(http://www.cnblogs.com/take-fet ...
- TensorFlow object detection API
cloud执行:https://github.com/tensorflow/models/blob/master/research/object_detection/g3doc/running_pet ...
- 对于谷歌开源的TensorFlow Object Detection API视频物体识别系统实现教程
本教程针对Windows10实现谷歌近期公布的TensorFlow Object Detection API视频物体识别系统,其他平台也可借鉴. 本教程将网络上相关资料筛选整合(文末附上参考资料链接) ...
- 谷歌开源的TensorFlow Object Detection API视频物体识别系统实现教程
视频中的物体识别 摘要 物体识别(Object Recognition)在计算机视觉领域里指的是在一张图像或一组视频序列中找到给定的物体.本文主要是利用谷歌开源TensorFlow Object De ...
- Tensorflow object detection API(1)---环境搭建与测试
参考: https://blog.csdn.net/dy_guox/article/details/79081499 https://blog.csdn.net/u010103202/article/ ...
- 基于TensorFlow Object Detection API进行迁移学习训练自己的人脸检测模型(二)
前言 已完成数据预处理工作,具体参照: 基于TensorFlow Object Detection API进行迁移学习训练自己的人脸检测模型(一) 设置配置文件 新建目录face_faster_rcn ...
- Tensorflow object detection API ——环境搭建与测试
1.开发环境搭建 ①.安装Anaconda 建议选择 Anaconda3-5.0.1 版本,已经集成大多数库,并将其作为默认python版本(3.6.3),配置好环境变量(Anaconda安装则已经配 ...
- Tensorflow object detection API 搭建物体识别模型(四)
四.模型测试 1)下载文件 在已经阅读并且实践过前3篇文章的情况下,读者会有一些文件夹.因为每个读者的实际操作不同,则文件夹中的内容不同.为了保持本篇文章的独立性,制作了可以独立运行的文件夹目标检测. ...
随机推荐
- Spring Cloud Config 配置中心实践过程中,你需要了解这些细节!
本文导读: Spring Cloud Config 基本概念 Spring Cloud Config 客户端加载流程 Spring Cloud Config 基于消息总线配置 Spring Cloud ...
- mybatis <=或这个>=提示错误Tag name expecte问题解决
解决方案: 1.将<号或者>号进行转义 DATE_SUB(CURDATE(), INTERVAL 31 DAY) <= DATE(created) 2.使用<![CDATA[ ...
- Creating a Store Locator with PHP, MySQL & Google Maps(保存地图坐标 经纬度方法 google mysql)
Google Geo APIs Team August 2009 This tutorial is intended for developers who are familiar with PHP/ ...
- RocketMQ消息队列部署与可视化界面安装
MQ安装部署 最新版本下载:http://rocketmq.apache.org/release_notes 修改配置 vi conf/broker.conf 添加brokerIP1 brokerIP ...
- Java 添加、修改、读取、删除PPT备注
概述 幻灯片中的备注信息是只提供给幻灯片演讲者观看的特定内容,在演讲者放映幻灯片时,备注信息可给演讲者提供讲解思路,起到辅助讲解的作用.本文将通过Java程序来演示如何操作PPT幻灯片中的备注信息,要 ...
- 利用procedure批量插入数据
正文 要求在页面查询到5000条数据,为了方便插入,准备用shell脚本写curl命令调用自己写的代码接口,但是速度慢,而且写的时候遇到点儿小问题,故用sql语句写了这个功能 由于operat ...
- Vue入门教程 第四篇 (属性与事件)
computed计算属性 计算属性(computed)在处理一些复杂逻辑时是很有用的.它的定义方式与methods类似. <div id="app"> <div& ...
- SLAM中的卡方分布
视觉slam中相邻帧特征点匹配时,动辄上千个特征点,匹配错误的是难免的,而误匹配势必会对位姿精度以及建图精度造成影响,那么如何分辨哪些是误匹配的点对儿呢?如果已知两帧的的单应矩阵,假设单应矩阵是没有误 ...
- SpringBoot应用进阶
一.表单验证 Controller接收一个对象数据的表单,如下: 需要对表单friend里的age属性做一个限制,如下 第一个是最小值,第二个是出错时报的错误信息 怎么知道验证结果呢?如下: 二.AO ...
- Numpy中的三个常用正态分布相关的函数,randn,standard_normal, normal的区别
这三个函数都可以返回随机正态分布(高斯Gaussian 分布)的数组,都可以从numpy.random中导出 先看三个函数的参数方式: randn: randn(d0, d1, ..., dn), 返 ...