ROS机器人导航仿真(kinetic版本)
准备工作:
ubuntu 16.04系统;ROS kinetic版本;ROS包turtlebot,导航包rbx1,模拟器arbotix,可视化rviz
1、安装ubuntu 16.04系统与安装ROS kinetic版本自行百度安装。一下链接可作为参考。
http://blog.csdn.net/weicao1990/article/details/52575314
2、在安装好ROS kinetic版本的ubuntu系统中, ctrl+art+t打开一个终端,安装turtlebot包,输入命令
sudo apt-get install ros-kinetic-turtlebot-*
3、安装可视化工具rviz
rosdep update rosdep install rviz rosmake rviz
运行rviz:
在一个终端中运行
roscore
在另一个终端中运行
rosrun rviz rviz
(记得先运行roscore,否则就会出现错误:could not contact ROS master)
4、安装arbotix模拟器
方法一:
sudo apt-get install ros-kinetic-arbotix-*
方法二:(使用git源码安装)
在ROS工作包caktkin_ws中的源码文件夹src中下载git源码
cd ~/catkin_ws/src git clone https://github.com/vanadiumlabs/arbotix_ros.git cd .. catkin_make
(ps:提示找不到ROS包错误,就去更新一下环境:source ~/catkin_ws/devel/setup.bash)
5、安装ROS-BY-EXAMPLE书配套的代码包rbx1
cd ~/catkin_ws/src git clone https://github.com/pirobot/rbx1.git cd .. catkin_make
ps:在安装rbx1之前,可以选择性的安装一些依赖包
sudo apt-get install ros-kinetic-turtlebot-bringup \ ros-kinetic-turtlebot-create ros-kinetic-openni-* \ ros-kinetic-openni2-* ros-kinetic-freenect-* ros-kinetic-usb-cam \
ros-kinetic-laser-* ros-kinetic-hokuyo-node \
ros-kinetic-audio-common gstreamer0.-pocketsphinx \
ros-kinetic-pocketsphinx ros-kinetic-slam-gmapping \
ros-kinetic-joystick-drivers python-rosinstall \
ros-kinetic-orocos-kdl ros-kinetic-python-orocos-kdl \
python-setuptools ros-kinetic-dynamixel-motor \
libopencv-dev python-opencv ros-kinetic-vision-opencv \
ros-kinetic-depthimage-to-laserscan ros-kinetic-arbotix-* \
ros-kinetic-turtlebot-teleop ros-kinetic-move-base \
ros-kinetic-map-server ros-kinetic-fake-localization \
ros-kinetic-amcl
roslaunch rbx1_bringup fake_turtlebot.launch
roslaunch rbx1_nav fake_amcl.launch map:=test_map.yaml
rosrun rviz rviz -d `rospack find rbx1_nav`/nav.rviz
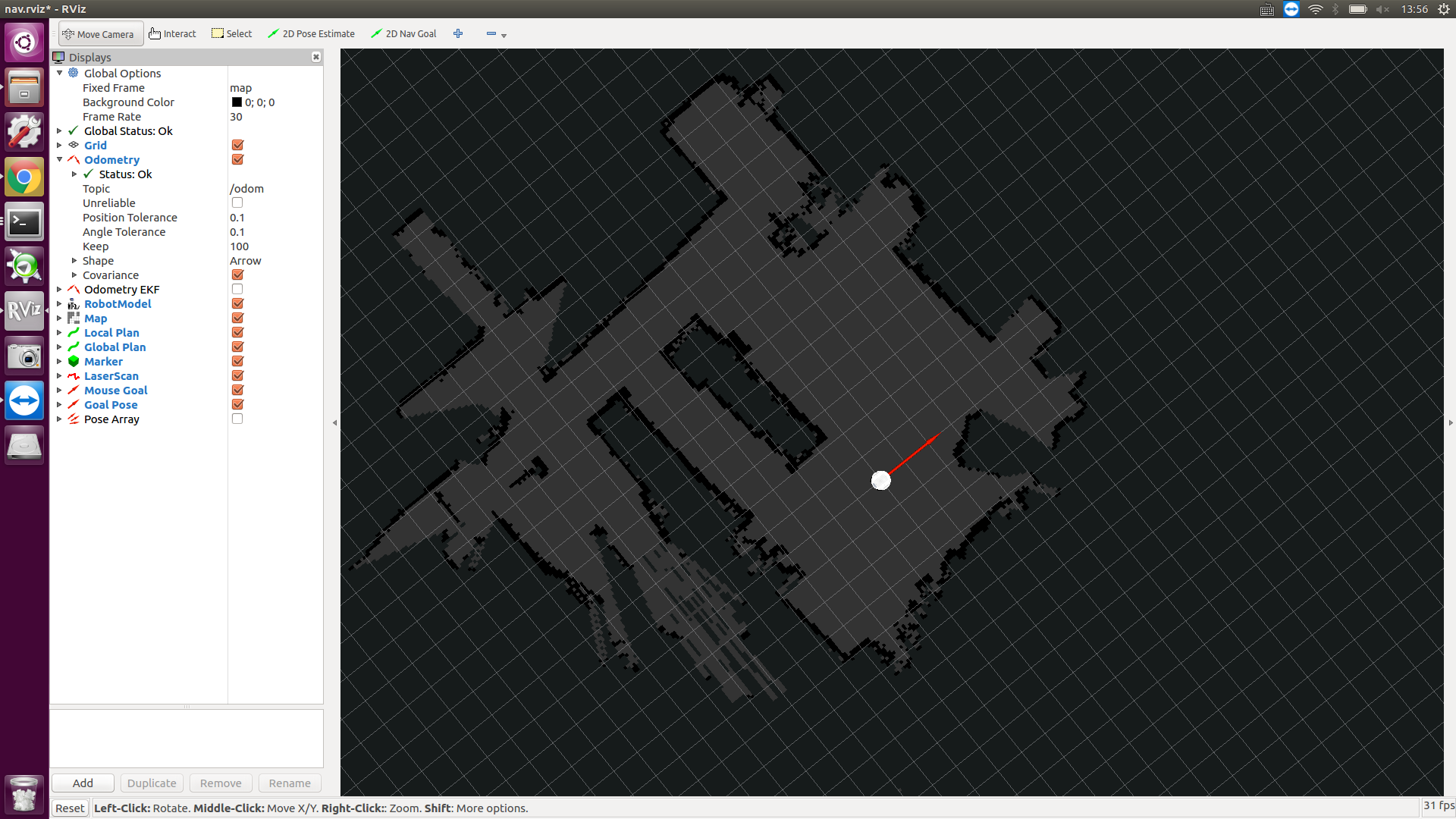
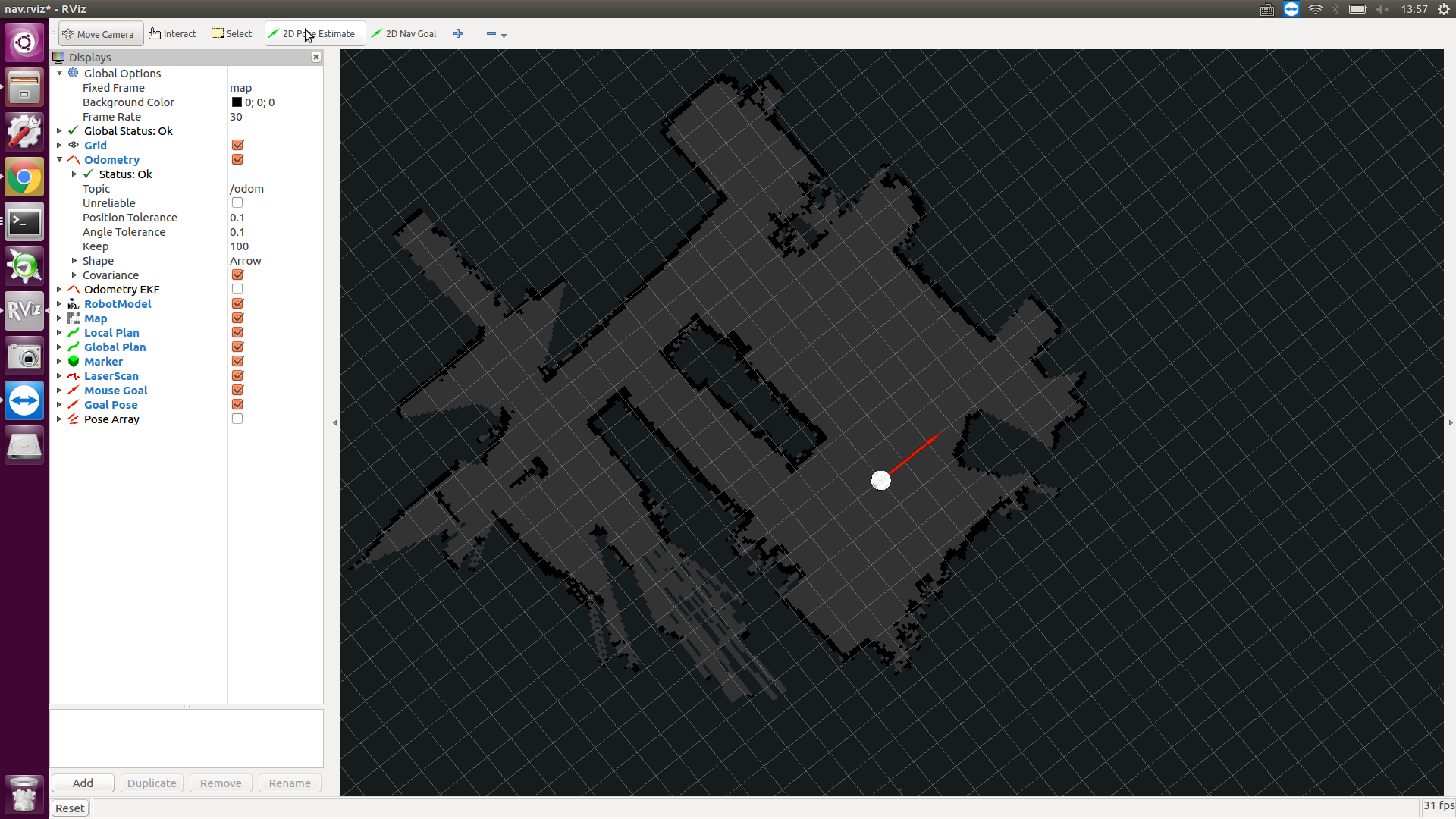
选择机器人目的位置
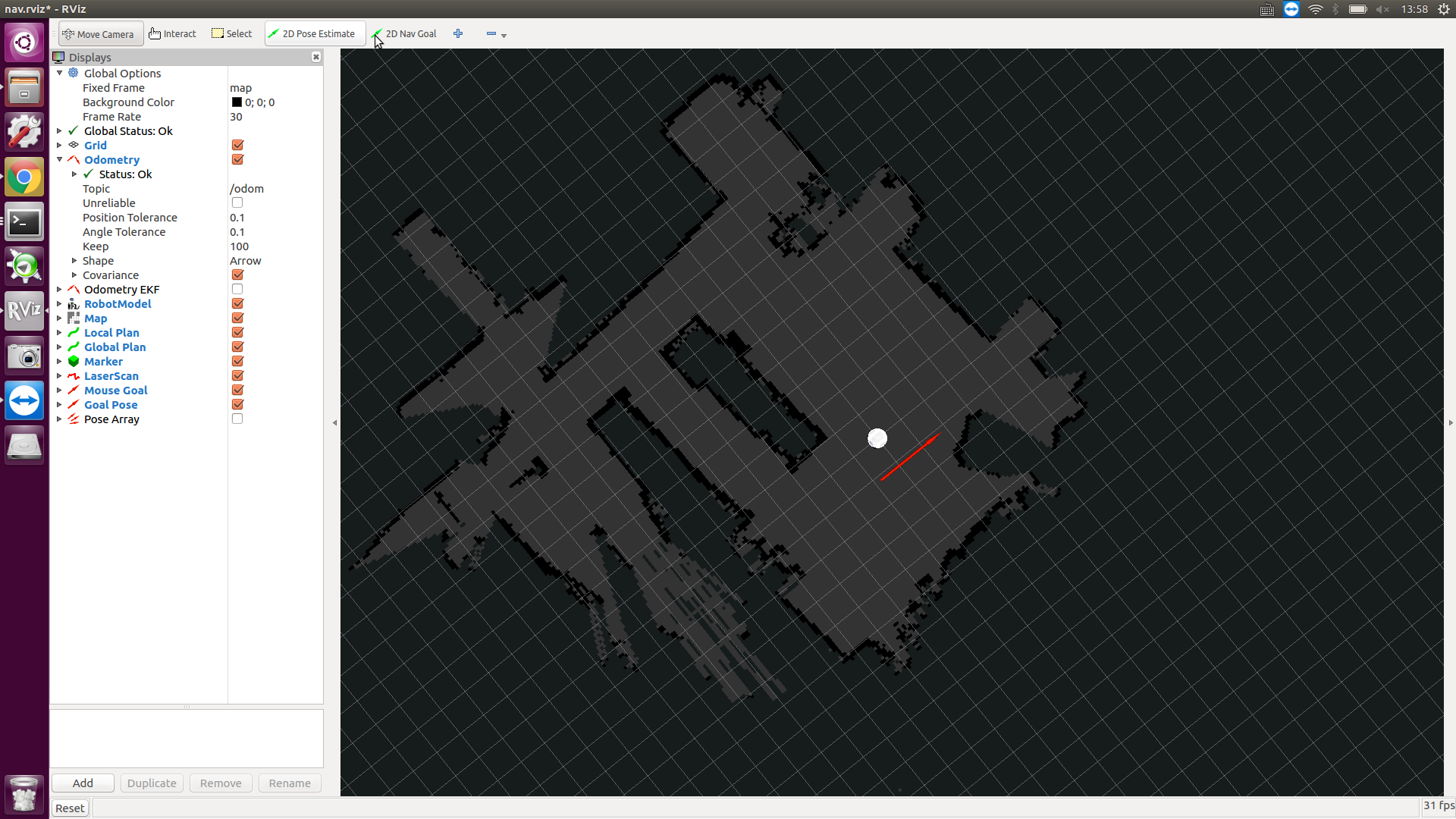
自动导航效果:

相关导航的原理可查询ros官网wiki
http://wiki.ros.org/cn/navigation/Tutorials
参考博客
http://www.guyuehome.com/273
ROS机器人导航仿真(kinetic版本)的更多相关文章
- ROS机器人导航一 : 从英雄联盟到ROS导航
写在前面: 这是这个系列的第一篇 本系列主要从零开始深入探索ROS(机器人操作系统)的导航和规划. 这个系列的目标,是让大家了解: 1.ROS的导航是怎么实现的 2.认识ROS里各种已有的导航算法,清 ...
- ros机器人导航设置原点,目标点
之前利用movebase导航定位都是通过rviz用鼠标指来指去,实验时非常方便,但实际应用总不能也人工指来指去吧,这怎么体现智能呢 启动导航后,用以前使用的rviz设设置目标点来获取map坐标系下的位 ...
- ROS机器人程序设计(原书第2版)补充资料 (柒) 第七章 3D建模与仿真 urdf Gazebo V-Rep Webots Morse
ROS机器人程序设计(原书第2版)补充资料 (柒) 第七章 3D建模与仿真 urdf Gazebo V-Rep Webots Morse 书中,大部分出现hydro的地方,直接替换为indigo或ja ...
- ROS机器人程序设计(原书第2版)补充资料 kinetic
Effective Robotics Programming with ROS Third Edition Find out everything you need to know to build ...
- TIAGo ROS模拟教程2 - 自主机器人导航
TIAGo ROS Simulation Tutorial 2 – Autonomous robot navigation TIAGo ROS模拟教程2 - 自主机器人导航 发表于 12月 23,20 ...
- ros机器人之小乌龟仿真-路径记录
------------恢复内容开始------------ 通过自己不断地摸索,对ros系统有了一定的了解,首先装系统,这一过程中也遇到了很多问题,但通过不断地尝试,经过一天一夜的倒腾,总算是把系统 ...
- ROS机器人程序设计(原书第2版)补充资料 (玖) 第九章 导航功能包集进阶 navigation
ROS机器人程序设计(原书第2版)补充资料 (玖) 第九章 导航功能包集进阶 navigation 书中,大部分出现hydro的地方,直接替换为indigo或jade或kinetic,即可在对应版本中 ...
- ROS机器人程序设计(原书第2版)补充资料 (零) 源代码、资料和印刷错误修订等 2017年01月01日更新
ROS机器人程序设计(原书第2版)补充资料 (零) 源代码等 ROS官网 版)部分内容修订 页:第1行,删去$ 页:第6行,float64 y 前面加一个空格 页:中间创建主题:下面程序不用换行,(& ...
- ROS机器人程序设计(原书第2版)补充资料 (捌) 第八章 导航功能包集入门 navigation
ROS机器人程序设计(原书第2版)补充资料 (捌) 第八章 导航功能包集入门 navigation 书中,大部分出现hydro的地方,直接替换为indigo或jade或kinetic,即可在对应版本中 ...
随机推荐
- 自动化运维 --- git
一. git 概括 二.常用指令 git init 初始化 git status 查看git的状态 git add 将文件放到缓存区 git commit -m 将缓存区的内容提交到本地仓库 git ...
- 深度学习网络中numpy多维数组的说明
目前在计算机视觉中应用的数组维度最多有四维,可以表示为 (Batch_size, Row, Column, Channel) 以下将要从二维数组到四维数组进行代码的简单说明: Tips: 1) 在nu ...
- Linux SSH 基于密钥交换的自动登录原理简介及配置说明
协商交互过程 1.客户端向目标服务器发送登录请求.在SSH 服务启用了证书验证登录方式后,会优先通过证书验证方式进行登录验证. 2.目标服务器根据 SSH 服务配置,在用户对应目录及文件中读取到有效的 ...
- Redhat终端中文乱码解决
文件中的中文以及命令反馈的中文能够正常显示,但是在终端中用ls等命令查看文件时会出现乱码. 我在i18n文件中加了下面两行内容(本来只有第一行),后来就能正常显示了.
- idea Debug快捷键
快捷键 介绍 F7 在 Debug 模式下,进入下一步,如果当前行断点是一个方法,则进入当前方法体内, 如果该方法体还有方法,则不会进入该内嵌的方法中 * F8 在 Debug 模式下,进入下一步,如 ...
- js 变量作用域
例子 <script> var a = "heh" function findLove(){ console.log(a); function findforyou() ...
- C#实现基于ffmpeg加虹软的人脸识别demo及开发分享
对开发库的C#封装,屏蔽使用细节,可以快速安全的调用人脸识别相关API.具体见github地址.新增对.NET Core的支持,在Linux(Ubuntu下)测试通过.具体的使用例子和Demo详解,参 ...
- 模板引擎ejs入门学习
1:利用 NPM 安装 EJS 很简单 npm install ejs 2:安装完成肯定就是使用了 var template = ejs.compile(str, options); template ...
- 算法笔记--Splay && Link-Cut-Tree
Splay 参考:https://tiger0132.blog.luogu.org/slay-notes 普通模板: ; ], val[N], cnt[N], fa[N], sz[N], lazy[N ...
- [Web Service] Tutorial Basic Concepts
WSDL是网络服务描述语言,是一个包含关于web service信息(如方法名,方法参数)以及如何访问它. WSDL是UDDI的一部分. 作为web service 应用程序之间的接口,发音为wiz- ...