高通MSM8255 GPS 调试分析&&Android系统之Broadcom GPS 移植【转】
本文转载自:http://blog.csdn.net/gabbzang/article/details/12063031
http://blog.csdn.NET/dwyane_zhang/article/details/6775738
没事做整理一下GPS的流程,也算给自己一个交代。
1.硬件抽象层:
高通MSM的硬件层代码在:hardware/qcom/gps/loc_api下,高通的GPS集成在baseband侧,与Modem部分一样,同样是基于share Memory上高通自有的RPC协议实现。所以高通的硬件层分为两部分,一部分实现的是:硬件抽象层的接口实现,另一部分实现的是基于RPC协议封装的具体控制和数据操作,该部分主要是利用高通的RPC代码生成器生成。两个部分是通过一个glue层粘合在一起的。高通MSM的硬件抽象层在其子目录 libloc_api中,主要在loc_eng.cpp中。loc_eng_ioctl.cpp用于承载到glue层的具体控制和回调。而剩余其它几个文件主要是辅助GPS定位的XTRA和Net Initiated的实现。
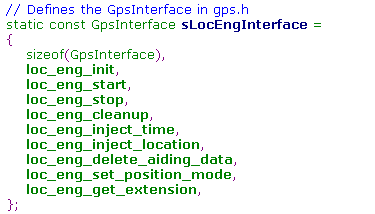
GpsInterface接口实现如下:
高通的GPS硬件抽象层包含GPS数据的“获取”和“解析”,它们都通过RPC上报。然后再调用loc_eng_init注册的回调,向上层上报。
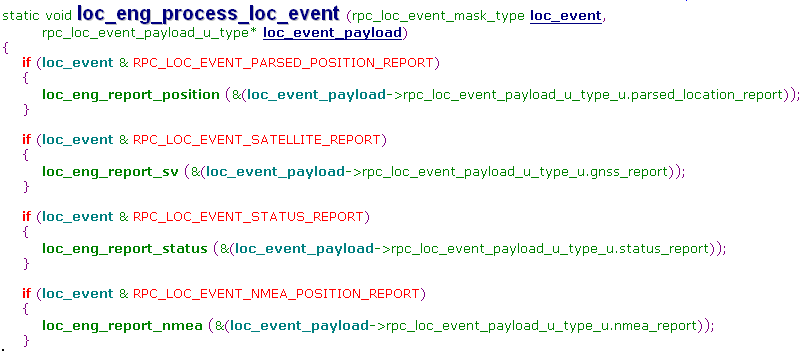
上报部分的实现是基于loc_eng_process_deferred_action函数的线程中,该线程实现一个等待循环,当GPS有数据解析上报时,RPC部分会回调loc_eng_init初始化时的loc_event_cb,该回调函数会激活线程中的等待循环。线程通过loc_eng_process_loc_event函数处理获取数据,并调用loc_eng_report_xxx(xxx代表position、卫星状态sv等),将数据通过上层注册的回调函数进行上报。这部分代码如下:
高通GPS还实现了XTRA与AGPS,其中AGPS的接口在sLocEngAGpsInterface中实现,内容如下:
loc_eng_agps_set_server函数完成对server的配置。硬件抽象层根据loc_eng_set_position_mode中传入的配置,决定是否启用AGPS。其中启动函数为set_agps_server,该函数最终通过RPC写入GPS。

http://blog.csdn.Net/dwyane_zhang/article/details/7458270
1. 内核部分的移植:
内核部分的移植基本上就是对芯片上下电,建立数据结构体,打通GPS通信的串口通道,以及建立文件设备结点供上层调用。所建立的文件结点是针对Power_enable和Reset两个脚。
在板载文件board-msm7x30.c里需要做的任务:
static void msm7x30_init_gps(void)
{
…
vreg_l2 = vreg_get(NULL, "xo_out");
ret = vreg_set_level(vreg_l2, 2600);
ret = vreg_enable(vreg_l2);
给芯片上电的电压为2.6V。
…
vreg_l13 = vreg_get(NULL, "wlan");
ret = vreg_set_level(vreg_l13, 1800);
ret = vreg_enable(vreg_l13);
给芯片另外一个脚上电为1.8V。
}
除了以上两个引脚的上电以为,还有另外两个比较重要的引脚gps_poweron和gps_reset初始化的上电时序。如下:
int gps_power_init(void)
{
gps_reset_level(0); //reset off
mdelay(200);
gps_reset_level(1); //reset on
mdelay(200);
gps_standby_level(0); //standby off
return 0;
}
前面是对芯片的上电的完成,下面需要对GPS通道的UART进行配置。由于Uart驱动是比较成熟的驱动,所以只需要把uart3的资源加进驱动里面去就OK了。如下:
struct platform_device *devices[]__initdata = {
…
&msm_device_uart3;
…
}
以上板载里的添加就算完成了。
下面是对gps_poweron和gps_reset这两个引脚完成文件结点的驱动,来提供给上层操作:
这部分的驱动在kernel/drivers/gpio/gps-gpio.c文件中。
#include <Linux/sysdev.h>
#include <linux/errno.h>
#include <linux/io.h>
#include <linux/device.h>
#include <mach/gpio.h>
#include <linux/platform_device.h>
#include <linux/gpio_gps.h>
#include <asm/uaccess.h>
#include <mach/hardware.h>
#include <linux/device.h>
static ssize_t gps_standby_show(struct device *dev,
struct device_attribute *attr, char *buf)
{
int len = 0;
struct gps_gpio_platform_data *pdata = dev->platform_data;
len += sprintf(buf + len, "%u\n", pdata->standby_state);
printk("======== %s len = %d\n",__func__,len);
return len;
}
static ssize_t gps_standby_store(struct device *dev,
struct device_attribute *attr, const char *buf, size_t size)
{
unsigned long state = simple_strtoul(buf, NULL, 10);
struct gps_gpio_platform_data *pdata = dev->platform_data;
pdata->standby_state = (int)state;
printk("\n ****** standby_state = %d \n",pdata->standby_state);
if(state)
pdata->gps_standby_level(1); //standby on
else
pdata->gps_standby_level(0); //standby off
return size;
}
static ssize_t gps_reset_show(struct device *dev,
struct device_attribute *attr, char *buf)
{
int len = 0;
struct gps_gpio_platform_data *pdata = dev->platform_data;
len += sprintf(buf + len, "%u\n", pdata->reset_state);
printk("======== %s len = %d\n",__func__,len);
return len;
}
static ssize_t gps_reset_store(struct device *dev,
struct device_attribute *attr, const char *buf, size_t size)
{
unsigned long state = simple_strtoul(buf, NULL, 10);
struct gps_gpio_platform_data *pdata = dev->platform_data;
printk("\n ******%s %s line = %d \n",__func__,__FILE__,__LINE__);
pdata->reset_state = (int)state;
printk("\n ****** reset_state = %d \n",pdata->reset_state);
if(state)
pdata->gps_reset_level(1); //reset on
else
pdata->gps_reset_level(0); //reset off
return size;
}
static DEVICE_ATTR(GPS_nRST, 0644, gps_reset_show, gps_reset_store);
static DEVICE_ATTR(GPS_PWR_EN, 0644, gps_standby_show, gps_standby_store);
static int gps_gpio_probe(struct platform_device *pdev)
{
int ret;
struct gps_gpio_platform_data *pdata = pdev->dev.platform_data;
pdata->standby_state = 0;
pdata->reset_state = 1;
pdata->gps_power_init();
ret = device_create_file(&pdev->dev, &dev_attr_GPS_nRST);
// ret = device_create_file(&pdev->dev, &GPS_PWR_EN);
printk("////// ret = %d \n",ret);
if(ret)
return ret;
else
return device_create_file(&pdev->dev, &dev_attr_GPS_PWR_EN);
}
static int gps_gpio_remove(struct platform_device *pdev)
{
struct gps_gpio_platform_data *pdata = pdev->dev.platform_data;
pdata->gps_reset_level(0);
pdata->gps_standby_level(0);
return 0;
}
struct platform_driver gps_gpio_driver = {
.probe = gps_gpio_probe,
.remove = gps_gpio_remove,
.driver = {
.name = "gps_gpio",
.owner = THIS_MODULE,
},
};
static int __init gps_gpio_init(void)
{
return platform_driver_register(&gps_gpio_driver);
}
static void __exit gps_gpio_exit(void)
{
platform_driver_unregister(&gps_gpio_driver);
}
late_initcall(gps_gpio_init);
module_exit(gps_gpio_exit);
MODULE_AUTHOR("zhangmin");
MODULE_LICENSE("GPL v2");
这里怎么实现就不详说了,看到代码了应该很好懂。
这样GPS在内核的工作基本上就完成了。
2. GPS硬件抽象层的移植
所有的工作在hardware/broadcom/gps/目录中完成。
首先把broadcom的代码拿过来解压,直接把解压后的文件夹放在hardware/broadcom/gps/目录下。
① 创建一个Android.mk 里面的内容如下:
LOCAL_PATH := $(call my-dir)
include $(CLEAR_VARS)
LOCAL_SRC_FILES := libgll.a
LOCAL_MODULE := libgll
LOCAL_MODULE_CLASS := STATIC_LIBRARIES
LOCAL_MODULE_TAGS := user
LOCAL_MODULE_SUFFIX := .a
include $(BUILD_PREBUILT)
include $(CLEAR_VARS)
LOCAL_SRC_FILES := libglnet.a
LOCAL_MODULE := libglnet
LOCAL_MODULE_CLASS := STATIC_LIBRARIES
LOCAL_MODULE_TAGS := user
LOCAL_MODULE_SUFFIX := .a
include $(BUILD_PREBUILT)
② 然后把Android.mk放在目录/prebuilt/android-arm/gps/下。
③ 然后把broadcom提供的libgll.a 和 libglnet.a文件也直接拷在目录/prebuilt/android-arm/gps/下。
④ 创建一个buildspec.mk文件,内容如下:
TARGET_ARCH_VARIANT:=armv7-a
SHOW_COMMANDS:=y
CONFIG_HAL_SERIAL_TYPE=UART
CONFIG_HAL_SERIAL_DEV=/dev/ttyS0
CONFIG_HAL_CMD=yes
CONFIG_HAL_CMD_FILE=/cache/glgpsctrl
CONFIG_HAL_LTO=yes
CONFIG_HAL_LTO_DIR=/data/gps/
CONFIG_HAL_LTO_FILE=lto.dat
CONFIG_HAL_NMEA_PIPE=yes
CONFIG_HAL_NMEA_FILE=/cache/gpspipe
CONFIG_HAL_NV=yes
CONFIG_HAL_NV_DIR=/data/gps/
CONFIG_HAL_NV_FILE=gldata.sto
CONFIG_HAL_RRC=no
CONFIG_HAL_GPIO_SYSFS=yes
CONFIG_HAL_CATCH_SIGNALS=yes
CONFIG_HAL_EE_DIR=./gps/
CONFIG_HAL_EE_FILE=cbee.cbee
CONFIG_HAL_LCS_API=yes
#CONFIG_HAL_LOG_ANDROID=yes
CONFIG_HAL_TIME_MONOTONIC=yes
CONFIG_HAL_SUPL=true
ENABLE_TLS=yes
然后把它放在hardware/broadcom/gps/目录下。
⑤ 将broadcom提供的glconfig.xml文件放在frameworks/base/data/etc/目录下。
⑥ 然后在frameworks/base/data/etc/目录下的Android.mk中添加以下几行:
include $(CLEAR_VARS)
LOCAL_MODULE := glconfig.xml
LOCAL_MODULE_TAGS := user eng
LOCAL_MODULE_CLASS := ETC
# This will install the file in /system/etc
LOCAL_MODULE_PATH := $(TARGET_OUT_ETC)
LOCAL_SRC_FILES := $(LOCAL_MODULE)
include $(BUILD_PREBUILT)
这样硬件抽象层的内容也移植完了。
通过这两部的移植,基本上GPS就可以正常的工作了。
如何检查GPS已经移植可以使用了呢?首先查看编译出来后在/system/bin/下是否生成了glgps这个可执行文件。
然后用命令来测试下:
glgps –c /system/etc/glconfig.xml Periodic
这样把机器放在空旷的地方测试就会在机器的/data/gps/log/目录下生成NEMA数据。
最后再用gpstest.apk来测试确认下是否真的搜到星定到位了。
整个GPS驱动相对来说比较简单,因为厂商基本上已经封装的很好,如果遇到问题可以直接联系FAE一起讨论。
高通MSM8255 GPS 调试分析&&Android系统之Broadcom GPS 移植【转】的更多相关文章
- Android系统之Broadcom GPS 移植
1. 内核部分的移植: 内核部分的移植基本上就是对芯片上下电,建立数据结构体,打通GPS通信的串口通道,以及建立文件设备结点供上层调用.所建立的文件结点是针对Power_enable和Res ...
- linux驱动由浅入深系列:高通sensor架构实例分析之三(adsp上报数据详解、校准流程详解)【转】
本文转载自:https://blog.csdn.net/radianceblau/article/details/76180915 本系列导航: linux驱动由浅入深系列:高通sensor架构实例分 ...
- linux驱动由浅入深系列:高通sensor架构实例分析之二(驱动代码结构)【转】
本文转载自:https://blog.csdn.net/radianceblau/article/details/73498303 本系列导航: linux驱动由浅入深系列:高通sensor架构实例分 ...
- 第一章 Android系统的编译和移植实例
第一章 Android系统的编译和移植实例 这一章节主要介绍了Android系统的编译和移植技术,作为建立在Linux内核的基础上的Android操作系统,它的编译和移植不论在过程还是技术方面都和嵌入 ...
- Android : 高通平台Camera调试之SetpropKey/camxoverridesettings.txt
高通相关网址:Createpoint: https://createpoint.qti.qualcomm.com(可下载文档,Release Note等)Chipcode: https://chipc ...
- 高通LCD驱动调试
本文转载自:http://www.itgo.me/a/x6305658852004979994/lcd%20qcom 来自 :http://blog.csdn.net/dacaozuo/article ...
- 高通平台Camera调试(一)【转】
本文转载自:http://www.voidcn.com/blog/Winva/article/p-6044730.html 4.3. Camera 参考文档: 1) 80-NA157-22_PRESE ...
- CVE-2017-11882:Microsoft office 公式编辑器 font name 字段栈溢出通杀漏洞调试分析
\x01 漏洞简介 在 2017 年 11 月微软的例行系统补丁发布中,修复了一个 Office 远程代码执行漏洞(缓冲区溢出),编号为 CVE-2017-11882,又称为 "噩梦公式&q ...
- 高通msm8909耳机调试
http://blog.csdn.net/mike8825/article/details/69489865?locationnum=3&fps=1 1.DTS相应修改: DTS相关代码:ke ...
随机推荐
- openTK学习
简介 the Open Tool Kit (OpenTK), 是对 OpenGL.OpenAL.OpenCL 的跨平台的封装,使用 C# 编写,它可以用在Mono.dotNet的语言:c#.VB.C+ ...
- ZRender实现粒子网格动画实战
注:本博文代码基于ZRender 3.4.3版本号开发,相应版本号库地址:ZRender 库. 效果 实现分析 通过上面显示的效果图,能够看出,这样的效果就是在Canvas中生成多个可移动的点,然后依 ...
- Yii2 数据操作Query Builder
转载地址: http://blog.csdn.net/hzqghost/article/details/44117081 Yii2 数据操作Query Builder 分类: Yii22015-03- ...
- Sereja and Array-数组操作或者线段树或树状数组
CodeForces - 315B Sereja and Array Time Limit: 1000MS Memory Limit: 262144KB 64bit IO Format: %I ...
- MFC开发小技巧总结
1.在类向导里面可以为对话框添加方法. 2.如要添加变量,直接右击添加变量即可. 3.若对某个控件添加方法或者称之为消息处理函数,直接右击添加事件处理程序即可.
- centos配置ip
/etc/sysconfig/network-scripts/ifcfg-eth0文件做如下修改 DEVICE=eth0 HWADDR=08:00:27:46:1D:E1 TYPE=Ethernet ...
- 你要的最后一个字符就在下面这个字符串里,这个字符是下面整个字符串中第一个只出现一次的字符。(比如,串是abaccdeff,那么正确字符就是b了)
include "stdafx.h" #include<iostream> #include<string> using namespace std; in ...
- 【puppeteer+Node.js安装环境】之WebStorm编辑器运行失败问题:Error: Cannot find module 'puppeteer'并且代码出不来“asnyc”标识以及有红色波浪线解决办法
现象一: module.js:557 throw err; ^ Error: Cannot find module 'puppeteer' at Function.Module._r ...
- 用HttpClient模拟HTTP的GET和POST请求(转)
本文转自:http://blog.csdn.net/xiazdong/article/details/7724349 一.HttpClient介绍 HttpClient是用来模拟HTTP请求的,其 ...
- PeekMessage究竟做了什么?
1.UI线程 2.工作线程 把Delphi里TThread的WaitFor函数转化成C++代码,就会是下面这个样子. BOOL TThread::WaitFor(HANDLE hThread) { M ...