u-boot移植(三)---修改前工作:代码流程分析2
一、vectors.S
1.1 代码地址
vectors.S (arch\arm\lib)
1.2 流程跳转
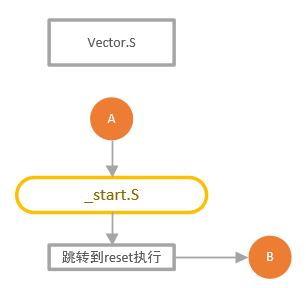
跳转符号 B 为 start.S 中的 reset 执行代码,暂且先不看,先看看 vector.S 中的执行。
1.3 代码分析
ldr{条件} 目的寄存器 <存储器地址>
_start: #ifdef CONFIG_SYS_DV_NOR_BOOT_CFG
.word CONFIG_SYS_DV_NOR_BOOT_CFG
#endif
/* LDR{条件} 目的寄存器 <存储器地址> */
/* 当异常发生的时候,由硬件机制处理器自动的跳到一个固定地址去执行相关异常处理程序,而这个固定地址就是所谓的异常向量。 */
b reset /* 跳转到reset执行 0x00000000 复位异常*/
ldr pc, _undefined_instruction /* 0x00000004 未定义指令异常 */
ldr pc, _software_interrupt /* 0x00000008 软中断异常 */
ldr pc, _prefetch_abort /* 0x0000000c 预取异常 */
ldr pc, _data_abort /* 0x00000010 数据异常 */
ldr pc, _not_used /* 0x00000014 未使用异常,多余的指令 */
ldr pc, _irq /* 0x00000018 外部中断异常 */
ldr pc, _fiq /* 0x0000001c 快速中断异常 */
这里的代码全部都是异常向量表的定义,第一段代码中,执行 b reset ,跳转到reset执行。
reset 我们的 start.S 代码中。
二、start.S
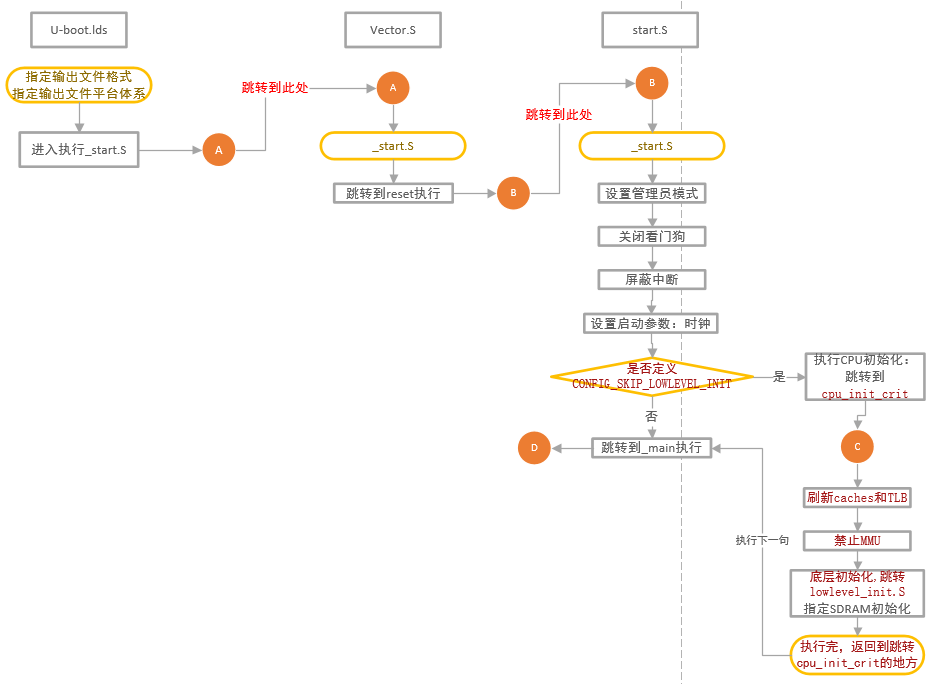
2.1 跳转流程

2.2 代码流程
2.3 代码分析
start.S (arch\arm\cpu\arm920t)
2.3.1 指令介绍
- .global symbol .global 使得链接程序(ld)能够识别 symbol,声明symbol是全局可见的
- ARM模式切换指令:
- mrs(Move to Register from State register):指令可以对状态寄存器CPSR和SPSR进行读操作。通过读CPSR可以获得当前处理器的工作状态。读SPSR寄存器可以获得进入异常前的处理器状态(因为只有异常模式下有SPSR寄存器)。
- msr:MSR指令可以对状态寄存器CPSR和SPSR进行写操作。
- bic:(位清除)指令对 Rn 中的值 和 Operand2 值的反码按位进行逻辑“与”运算。BIC 是 逻辑”与非” 指令, 实现的 Bit Clear的功能。
- orr:用于在两个操作数上进行逻辑或运算,并把结果放置到目的寄存器中。
- ORR{条件}{S} 目的寄存器,操作数 1,操作数 2
- 数据传输指令:LDR,STR。LDR和STR的第一操作数是目标寄存器,第二操作数是内存地址。
- LDR 内存--->寄存器
- STR 寄存器--->内存
- 内存的表示方式有:立即数,寄存器,或寄存器加偏移
- 立即数:内存的物理地址,前面加个#
- 寄存器:加个[],如[r1]
- 寄存器加偏移:[r1,r2] [r2, #4] , [r2, LSL, #4]等,把寄存器里的数当成地址
- mvn指令:与mov指令相似,唯一的区别是赋值的时候先按位取反
- 协处理器指令:MCR,MRC
- MCR:将ARM处理器的寄存器中的数据传送到协处理器的寄存器中。如果协处理器不能成功地执行该操作,将产生未定义的指令异常中断。指令的语法格式:
- MCR{<cond>} p15, 0, <Rd>, <CRn>, <CRm>{,<opcode_2>}
- MCR2 p15, 0, <Rd>, <CRn>, <CRm>{,<opcode_2>}
- <cond>为指令执行的条件码。当<cond>忽略时指令为无条件执行。MCR2中,<cond>为Ob1111,指令为无条件执行指令。
- MRC:将协处理器的寄存器中数值传送到ARM处理器的寄存器中。如果协处理器不能成功地执行该操作,将产生未定义的指令异常中断。
- MCR:将ARM处理器的寄存器中的数据传送到协处理器的寄存器中。如果协处理器不能成功地执行该操作,将产生未定义的指令异常中断。指令的语法格式:
2.3.2 代码分析
2.3.2.1 u-boot.dis分析
u-boot.dis分析
代码跳转到reset,reset的地址为 2e8:

在2e8处执行reset的代码,此段代码是对CPSR寄存器进行操作

CPSR寄存器主要是用来CPU切换用户模式和系统模式,寄存器的定义如下:
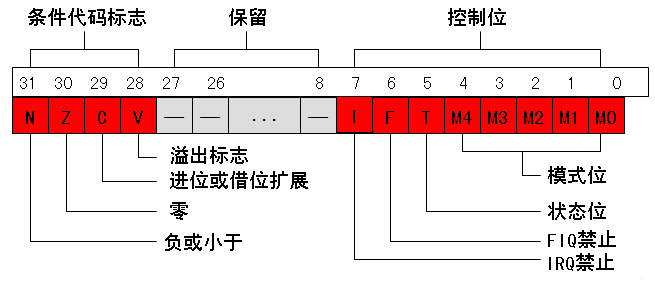
- 中断禁止位I、F:置1时,禁止IRQ中断和FIQ中断。
- T标志位:该位反映处理器的运行状态。当该位为1时,程序运行于THUMB状态,否则运行于ARM状态。该信号反映在外部引脚TBIT上。在程序中不得修改CPSR中的TBIT位,否则处理器工作状态不能确定。
| M[4:0] | 处理器模式 | ARM模式可访问的寄存器 | THUMB模式可访问的寄存器 |
| 0b10000 | 用户模式 | PC,CPSR,R0~R14 | PC,CPSR,R0~R7,LR,SP |
| 0b10001 | FIQ模式 | PC,CPSR,SPSR_fiq,R14_fiq~R8_fiq,R0~R7 | PC,CPSR,SPSR_fiq,LR_fiq,SP_fiq,R0~R7 |
| 0b10010 | IRQ模式 | PC,CPSR,SPSR_irq,R14_irq~R13_irq,R0~R12 | PC,CPSR,SPSR_irq,LR_irq,SP_irq,R0~R7 |
| 0b10011 | 管理模式 | PC,CPSR,SPSR_svc,R14_svc~R13_svc,R0~R12 | PC,CPSR,SPSR_svc,LR_svc,SP_svc,R0~R7 |
| 0b10111 | 中止模式 | PC,CPSR,SPSR_abt,R14_abt~R13_abt,R0~R12 | PC,CPSR,SPSR_abt,LR_abt,SP_abt,R0~R7 |
| 0b11011 | 未定义模式 | PC,CPSR,SPSR_und,R14_und~R13_und,R0~R12 | PC,CPSR,SPSR_und,LR_und,SP_und,R0~R7 |
| 0b11111 | 系统模式 | PC,CPSR,R0~R14 | PC,CPSR,LR,SP,R0~R74 |
CPSR寄存器的M4~M0位为模式位,所以将CPSR的值放入R0寄存器中后,就是将R0的值的低5位进行清零,然后与 1101 0011进行相互,则进入管理模式。
关闭看门狗:

看门狗寄存器

屏蔽中断,代码中并没有234行和236行的执行,这里是跳转到 地址位 35c 去执行打印,暂且先不管这两行,只要知道都是中断屏蔽的代码,留待后续分析:



中断屏蔽寄存器:

设置启动参数:时钟

时钟分频寄存器

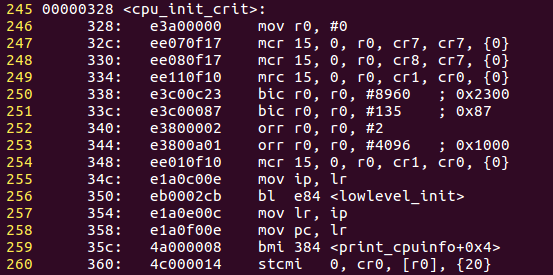
紧接着跳转到地址 328 去执行 cpu_init_crit,执行DRAM的初始化:

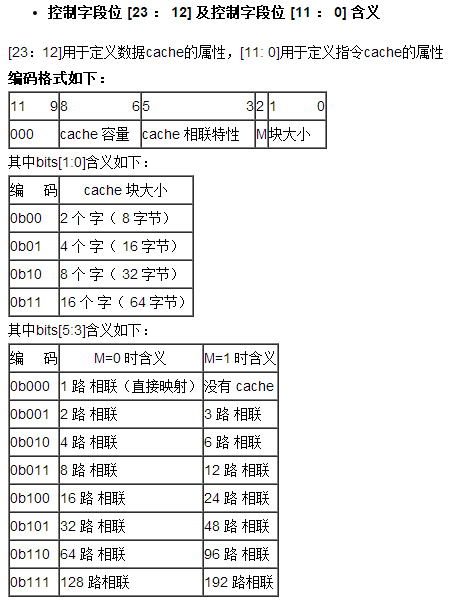
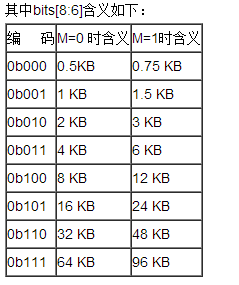
这里涉及到CP15寄存器,CP15是用于系统存储管理的协处理器,操作指令为:
- coproc 指令操作的协处理器名.标准名为pn,n,为0~15
- opcode1 协处理器的特定操作码. 对于CP15寄存器来说,opcode1永远为0,不为0时,操作结果不可预知
- CRd 作为源寄存器的ARM寄存器,其值被传送到协处理器寄存器中。CRd不能为PC,当其为PC时,指令操作结果不可预知。
- CRn 存放第1个操作数的协处理器寄存器。作为目标寄存器的协处理器寄存器,其编号可能为C0,C1....C15。
- CRm 存放第2个操作数的协处理器寄存器. (用来区分同一个编号的不同物理寄存器,当不需要提供附加信息时,指定为C0)
- opcode2 提供附加信息,可选的协处理器特定操作码. (用来区分同一个编号的不同物理寄存器,当不需要提供附加信息时,指定为0)
cpu_init_crit 涉及到的协处理器的寄存器有C0,C1,C7,C8:
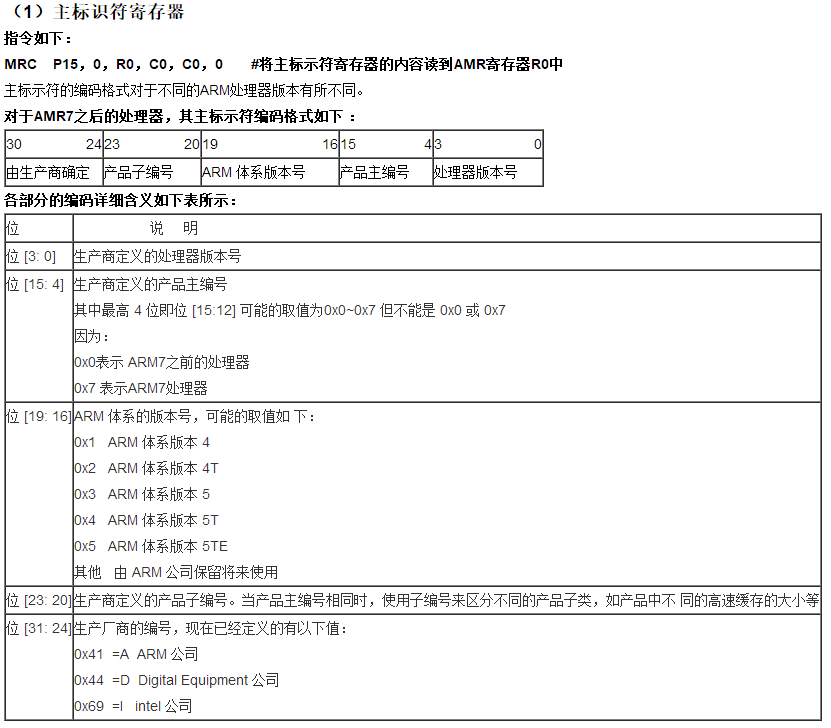
【1】C0寄存器

【2】C1寄存器


| C1中的控制位 | 含义 |
| M(bit[0]) |
0 :禁止 MMU 或者 PU 1 :使能 MMU 或者 PU 如果系统中没有MMU及PU,读取时该位返回0,写入时忽略该位 |
| A(bit[1]) |
0 :禁止地址对齐检查 1 :使能地址对齐检查 |
| C(bit[2]) |
当数据cache和指令cache分开时,本控制位禁止/使能数据cache。当数据cache和指令cache统一时,该控制位禁止/使能整个cache。 0 :禁止数据 / 整个 cache 1 :使能数据 / 整个 cache 如果系统中不含cache,读取时该位返回0.写入时忽略 当系统中不能禁止cache 时,读取时返回1.写入时忽略 |
| W(bit[3]) |
0 :禁止写缓冲 1 :使能写缓冲 如果系统中不含写缓冲时,读取时该位返回0.写入时忽略 当系统中不能禁止写缓冲时,读取时返回1.写入时忽略 |
| P(bit[4]) |
对于向前兼容26位地址的ARM处理器,本控制位控制PROG32控制信号 0 :异常中断处理程序进入 32 位地址模式 1 :异常中断处理程序进入26 位地址模式 如果本系统中不支持向前兼容26位地址,读取该位时返回1,写入时忽略 |
| D(bit[5] |
对于向前兼容26位地址的ARM处理器,本控制位控制DATA32控制信号 0 :禁止 26 位地址异常检查 1 :使能 26 位地址异常检查 如果本系统中不支持向前兼容26位地址,读取该位时返回1,写入时忽略 |
| L(bit[6] |
对于ARMv3及以前的版本,本控制位可以控制处理器的中止模型 0 :选择早期中止模型 1 :选择后期中止模型 |
| B(bit[7]) |
对于存储系统同时支持big-endian和little-endian的ARM系统,本控制位配置系统的存储模式 0 : little endian 1 : big endian 对于只支持little-endian的系统,读取时该位返回0,写入时忽略 对于只支持big-endian的系统,读取时该位返回1,写入时忽略 |
| S(bit[8]) | 在基于 MMU 的存储系统中,本位用作系统保护 |
| R(bit[9]) | 在基于 MMU 的存储系统中,本位用作 ROM 保护 |
| F(bit[10]) | 由生产商定义 |
| Z(bit[11]) |
对于支持跳转预测的ARM系统,本控制位禁止/使能跳转预测功能 0 :禁止跳转预测功能 1 :使能跳转预测功能 对于不支持跳转预测的ARM系统,读取该位时返回0,写入时忽略 |
| I(bit[12]) |
当数据cache和指令cache是分开的,本控制位禁止/使能指令cache 0 :禁止指令 cache 1 :使能指令 cache 如果系统中使用统一的指令cache和数据cache或者系统中不含cache,读取该位时返回0,写入时忽略。当系统中的指令cache不能禁止时,读取时该位返回1,写入时忽略 |
| V(bit[13] |
对于支持高端异常向量表的系统,本控制位控制向量表的位置 0 :选择低端异常中断向量 0x0~0x1c 1 :选择高端异常中断向量0xffff0000~ 0xffff001c 对于不支持高端异常向量表的系统,读取时该位返回0,写入时忽略 |
| PR(bit[14]) |
如果系统中的cache的淘汰算法可以选择的话,本控制位选择淘汰算法 0 :常规的 cache 淘汰算法,如随机淘汰 1 :预测性淘汰算法,如round-robin 淘汰算法 如果系统中cache的淘汰算法不可选择,写入该位时忽略。读取该位时,根据其淘汰算法是否可以比较简单地预测最坏情况返回0或者1 |
| L4(bit[15]) |
对于ARM版本5及以上的版本,本控制位可以提供兼容以前的ARM版本的功能 0 :保持 ARMv5 以上版本的正常功能 1 :将 ARMv5 以上版本与以前版本处理器 兼容,不根据跳转地址的 bit[0] 进行 ARM 指令和 Thumb 状态切换: bit[0] 等于 0 表示 ARM 指令,等于 1 表示 Thumb 指令 |
| Bits[31:16]) | 这些位保留将来使用,应为UNP/SBZP |
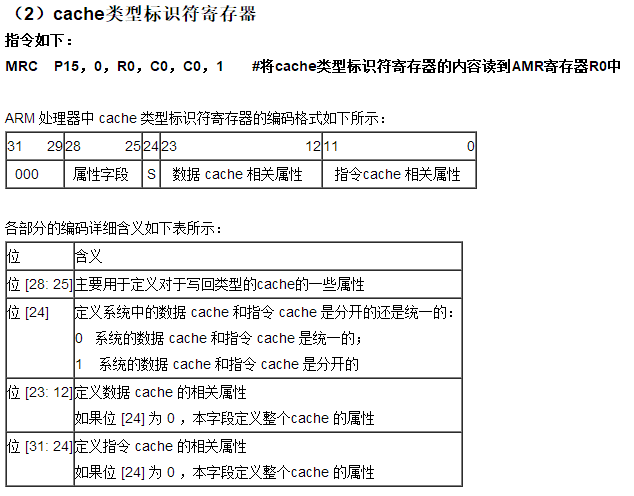
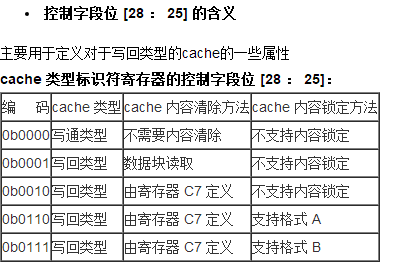
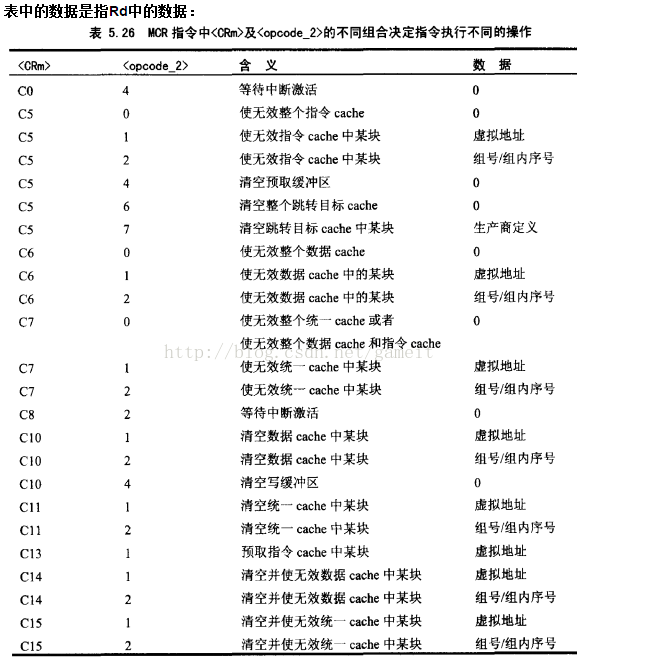
【3】C7寄存器

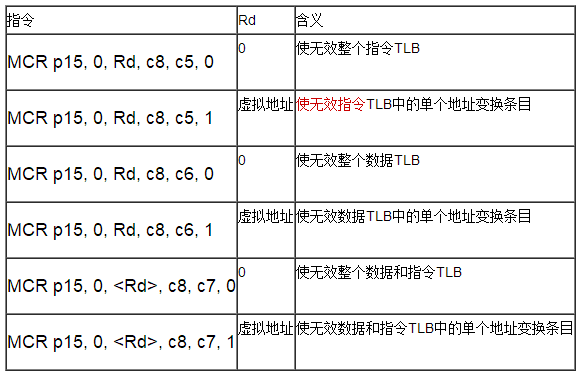
【4】C8寄存器

执行完cache和MMU的设置后,则跳转到lowlevel_init(lowlevel_init.S (arch\arm\cpu\arm920t\ep93xx) )中执行。

执行完内存初始化后,则执行_main()函数。
2.3.2.2 代码执行
start.S
.globl reset reset:
/*
* set the cpu to SVC32 mode
* 设置 CPU 为管理员模式
*/
mrs r0, cpsr /* 将CPSR状态寄存器读取保存在r0中 */
bic r0, r0, #0x1f /* 清除r0中数据的低5位,然后存放在r0中 */
orr r0, r0, #0xd3 /* r0的数据与 1101 0011 相或,然后存放在r0中 */
msr cpsr, r0 /* 将r0中的数据存放在cpsr寄存器中 */ /* 定义控制寄存器地址 */
# define pWTCON 0x53000000 /* 看门狗地寄存器地址 */
# define INTMSK 0x4A000008 /* Interrupt-Controller base addresses */
# define INTSUBMSK 0x4A00001C /* 中断掩码 */
# define CLKDIVN 0x4C000014 /* clock divisor register */ /* 关闭看门狗 */
ldr r0, =pWTCON /* r0中存放看门狗寄存器地址 */
mov r1, #0x0 /* 将立即数0存放到r1中,r1 = 0x0 */
str r1, [r0] /* 将r1中的值存放到以r0中的值为地址的存储单元中,即 pwTCON = 0 */ /*
* mask all IRQs by setting all bits in the INTMR - default
* 屏蔽中断
*/
mov r1, #0xffffffff /* 将立即数 0xffffffff 存放到r1中*/
ldr r0, =INTMSK /* r0中存放中断控制寄存器基地址 */
str r1, [r0] /* 将r1中的值存放到以r0中的值为地址的存储单元中,即 INTMSK = 0xffffffff */ /* FCLK:HCLK:PCLK = 1:2:4 */
/* default FCLK is 120 MHz ! */
/* 设置启动参数:时钟 */
ldr r0, =CLKDIVN /* r0中存放时钟寄存器地址 */
mov r1, # /* 将立即数0存放到r1中,r1 = 0x3 */
str r1, [r0] /* 将r1中的值存放到以r0中的值为地址的存储单元中,即 CLKDIVN = 0 */ /*
* we do sys-critical inits only at reboot,
* not when booting from ram!
*/
#ifndef CONFIG_SKIP_LOWLEVEL_INIT
/* 执行CPU初始化,完成DRAM初始化操作,跳转到 cpu_init_crit 执行 */
bl cpu_init_crit
#endif bl _main /*------------------------------------------------------------------------------*/ .globl c_runtime_cpu_setup
c_runtime_cpu_setup: mov pc, lr /*
*************************************************************************
*
* CPU_init_critical registers
*
* setup important registers
* setup memory timing
*
*************************************************************************
*/ #ifndef CONFIG_SKIP_LOWLEVEL_INIT
cpu_init_crit:
/*
* flush v4 I/D caches
* CP15 的 C7 寄存器用来控制 cache 和写缓存
* CP15的寄存器C8就是清除TLB内容的相关操作。
*/
mov r0, # /* r0 = 0x0 */
/* 对应表格可知道:使整个数据cache和指令cache无效,即cache清零 */
mcr p15, , r0, c7, c7, /* flush v3/v4 cache */
/* 对应表格可知道:使整个数据和指令TLB无效,即TLB清零*/
mcr p15, , r0, c8, c7, /* flush v4 TLB */ /*
* disable MMU stuff and caches
*/
mrc p15, , r0, c1, c0, /* 将 CP15 的寄存器 C1 的值读到 r0 中 */
/* C1寄存器的8,9,13位被清除
* S(bit[8])在基于 MMU 的存储系统中,本位用作系统保护
* R(bit[9])在基于 MMU 的存储系统中,本位用作 ROM 保护
* V(bit[13])
* 对于支持高端异常向量表的系统,本控制位控制向量表的位置
* 0 :选择低端异常中断向量 0x0~0x1c
* 1 :选择高端异常中断向量0xffff0000~ 0xffff001c
* 对于不支持高端异常向量表的系统,读取时该位返回0,写入时忽略
*/
bic r0, r0, #0x00002300 @ clear bits , : (--V- --RS)
/* C1寄存器的0,1,2,7位被清除
* M(bit[0])
* 0 :禁止 MMU 或者 PU
* 1 :使能 MMU 或者 PU
* 如果系统中没有MMU及PU,读取时该位返回0,写入时忽略该位
* A(bit[1])
* 0 :禁止地址对齐检查
* 1 :使能地址对齐检查
* C(bit[2])
* 当数据cache和指令cache分开时,本控制位禁止/使能数据cache。
* 当数据cache和指令cache统一时,该控制位禁止/使能整个cache。
* 0 :禁止数据 / 整个 cache
* 1 :使能数据 / 整个 cache
* 如果系统中不含cache,读取时该位返回0.写入时忽略
* 当系统中不能禁止cache 时,读取时返回1.写入时忽略
* B(bit[7])
* 对于存储系统同时支持big-endian和little-endian的ARM系统,本控制位配置系统的存储模式
* 0 : little endian
* 1 : big endian
* 对于只支持little-endian的系统,读取时该位返回0,写入时忽略
* 对于只支持big-endian的系统,读取时该位返回1,写入时忽略
*/
bic r0, r0, #0x00000087 @ clear bits , : (B--- -CAM)
/* C1寄存器的bit1置1,即使能地址对齐 */
orr r0, r0, #0x00000002 @ set bit (A) Align
/* C1寄存器的bit12置1,即使能指令 cache */
/* I(bit[12])
* 当数据cache和指令cache是分开的,本控制位禁止/使能指令cache
* 0 :禁止指令 cache
* 1 :使能指令 cache
* 如果系统中使用统一的指令cache和数据cache或者系统中不含cache,读取该位时返回0,写入时忽略。
* 当系统中的指令cache不能禁止时,读取时该位返回1,写入时忽略
*/
orr r0, r0, #0x00001000 @ set bit (I) I-Cache
mcr p15, , r0, c1, c0, /* 将 r0 的值写到 CP15 的寄存器 C1 中 */ /*
* before relocating, we have to setup RAM timing
* because memory timing is board-dependend, you will
* find a lowlevel_init.S in your board directory.
*/
mov ip, lr /* 保存函数地址,用于返回 */ bl lowlevel_init /* 跳转到lowlevel_init 进行DRAM设置 */ /* 返回 */
mov lr, ip
mov pc, lr
#endif /* CONFIG_SKIP_LOWLEVEL_INIT */
lowlevel_init.S
.globl lowlevel_init
lowlevel_init:
/* memory control configuration */
/* make r0 relative the current location so that it */
/* reads SMRDATA out of FLASH rather than memory ! */
/* 初始化内存 */
ldr r0, =SMRDATA /* 将SMRDATA的首地址(第一个.word)内存单元数据放置到r0寄存器中 r0=eac */
ldr r1, =CONFIG_SYS_TEXT_BASE /* CONFIG_SYS_TEXT_BASE=0x0(include/configs/jz2440中定义) */
sub r0, r0, r1 /* r0 = r0 -r1 */
ldr r1, =BWSCON /* Bus Width Status Controller,BWSCON=0x48000000,此文件中定义 */
add r2, r0, #* /* r2 = r0 + 13*4 = 0xeac + 0x34 = 0xee0*/
:
ldr r3, [r0], # /* 将r0的值代表的内存单元放入r3中,之后r0的值偏移4位 */
str r3, [r1], # /* 将r3的值放入r1的值代表的地址中,r1的值代表的地址偏移4位 */
cmp r2, r0 /* 比较r2 和 r0 ,若不相等则执行下一句*/
bne 0b /* 向后跳转到标签0处*/ /* everything is fine now */
mov pc, lr /* 返回 */ .ltorg
/* the literal pools origin */ /*
* 初始化存储控制器,经过此初始化之后,内存才可以使用
*/
/* 地址为 0x00000eb0 */
SMRDATA:
/* 地址为 0x00000eb0 */
.word (+(B1_BWSCON<<)+(B2_BWSCON<<)+(B3_BWSCON<<)+(B4_BWSCON<<)+(B5_BWSCON<<)+(B6_BWSCON<<)+(B7_BWSCON<<))
/* 地址为 0x00000eb4 */
.word ((B0_Tacs<<)+(B0_Tcos<<)+(B0_Tacc<<)+(B0_Tcoh<<)+(B0_Tah<<)+(B0_Tacp<<)+(B0_PMC))
/* 地址为 0x00000eb8 */
.word ((B1_Tacs<<)+(B1_Tcos<<)+(B1_Tacc<<)+(B1_Tcoh<<)+(B1_Tah<<)+(B1_Tacp<<)+(B1_PMC))
/* 地址为 0x00000ebc */
.word ((B2_Tacs<<)+(B2_Tcos<<)+(B2_Tacc<<)+(B2_Tcoh<<)+(B2_Tah<<)+(B2_Tacp<<)+(B2_PMC))
/* 地址为 0x00000ec0 */
.word ((B3_Tacs<<)+(B3_Tcos<<)+(B3_Tacc<<)+(B3_Tcoh<<)+(B3_Tah<<)+(B3_Tacp<<)+(B3_PMC))
/* 地址为 0x00000ec4 */
.word ((B4_Tacs<<)+(B4_Tcos<<)+(B4_Tacc<<)+(B4_Tcoh<<)+(B4_Tah<<)+(B4_Tacp<<)+(B4_PMC))
/* 地址为 0x00000ec8 */
.word ((B5_Tacs<<)+(B5_Tcos<<)+(B5_Tacc<<)+(B5_Tcoh<<)+(B5_Tah<<)+(B5_Tacp<<)+(B5_PMC))
/* 地址为 0x00000ecc */
.word ((B6_MT<<)+(B6_Trcd<<)+(B6_SCAN))
/* 地址为 0x00000ed0 */
.word ((B7_MT<<)+(B7_Trcd<<)+(B7_SCAN))
/* 地址为 0x00000ed4 */
.word ((REFEN<<)+(TREFMD<<)+(Trp<<)+(Trc<<)+(Tchr<<)+REFCNT)
/* 地址为 0x00000ed8 */
.word 0x32
/* 地址为 0x00000edc */
.word 0x30
/* 地址为 0x00000ee0 */
.word 0x30
u-boot移植(三)---修改前工作:代码流程分析2的更多相关文章
- 关于calendar修改前的代码和修改后的代码
Java编写的日历,输入年月,输出这个月的日期与星期 修改前的代码: import java.io.BufferedReader; import java.io.IOException; import ...
- nova start 虚机的代码流程分析
nova start 虚机的代码流程分析,以ocata版本为分析基础1.nova api服务接受用户下发的 nova start启动虚机请求其对应的http restfull api接口为post / ...
- u-boot移植(四)---修改前工作:代码流程分析3---代码重定位
一.重定位 1.以前版本的重定位 2.新版本 我们的程序不只涉及一个变量和函数,我们若想访问程序里面的地址,则必须使用SDRAM处的新地址,即我们的程序里面的变量和函数必须修改地址.我们要修改地址,则 ...
- u-boot移植(二)---修改前工作:代码流程分析1
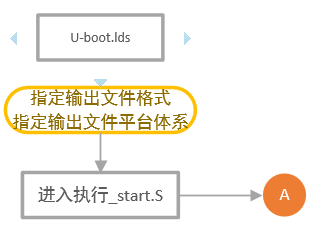
一.代码执行总体流程图 1.1 代码路径 U-boot.lds (arch\arm\cpu) vectors.S (arch\arm\lib) start.S (arch\arm\cpu\arm920 ...
- ARM-Linux移植之(三)——init进程启动流程分析
我们通常使用Busybox来构建根文件系统的必要的应用程序.Busybox通过传入的参数来决定执行何种操作.当init进程启动时,实际上调用的是Busybox的init_main()函数,下面我们来分 ...
- 七、uboot 代码流程分析---C环境建立
7.1 start.S 修改 在上一节中的流程中,发现初始化的过程并没由设置看门狗,也未进行中断屏蔽 如果看门狗不禁用,会导致系统反复重启,因此需要在初始化的时候禁用看门狗:中断屏蔽保证启动过程中不出 ...
- [Android6.0][RK3399] 电池系统(三)电量计 CW2015 驱动流程分析【转】
本文转载自:http://blog.csdn.net/dearsq/article/details/72770295 Platform: RK3399 OS: Android 6.0 Kernel: ...
- 六、uboot 代码流程分析---start.S
6.1 _start 入口函数 6.1.1 vectors.S (arch\arm\lib) 从上一节可以知道,uboot 的入口函数为 _start .此 函数定义在 vectors.S (arch ...
- 九、uboot 代码流程分析---relloc_code
执行完 board_init_f 后,重新跳转回 _main 中执行. 9.1 relloc_code 前 9.1.1 gd 设置 在调用board_init_f()完成板卡与全局结构体变量 gd 的 ...
随机推荐
- pandas shift
#!/usr/bin/env python # -*- coding: utf-8 -*- # @Time : 2018/5/24 15:03 # @Author : zhang chao # @Fi ...
- mysql学习笔记四 —— AB复制
要点:ab复制 mysql集群架构流程: ABB(主从复制)-->MHA(实现mysql高可用.读写分离.脚本控制vip飘逸)-->haproxy(对slave集群实现分发,负载均衡)-- ...
- charts & data visualization
charts & data visualization https://www.sitepoint.com/15-best-javascript-charting-libraries/ Can ...
- spring cloud实战与思考(四) JWT之Token主动失效
需求: JWT泄露.密码重置等场景下,需要将未过期但是已经不安全的JWT主动失效. 本文不再复述JWT的基础知识,不了解的小伙伴可以自行Google一下.这里主要是针对以上需求聊一聊解决方案.如果服务 ...
- C# 8小特性
对于C# 8,有吸引了大多数注意力的重大特性,如默认接口方法和可空引用,也有许多小特性被考虑在内.本文将介绍几例可能加入C#未来版本的小特性. 新的赋值运算符:&&=和||= 从第一个 ...
- 洛谷P3066 [USACO12DEC]逃跑的BarnRunning Away From…
题面链接 一句话题意:给出以1号点为根的一棵有根树,问每个点的子树中与它距离小于等于l的点有多少个. 我:似乎并不好做啊...看了题解后大雾... sol:考虑树上差分,对于一个点,在他那个位置++, ...
- SQL注入方法之:获取列名
select col_name(object_id('table'),1) from sysobjects where name='table'
- 自学Linux Shell4.2-监测磁盘空间mount umount df du
点击返回 自学Linux命令行与Shell脚本之路 4.2-监测磁盘空间mount umount df du 1. 挂载存储媒体mount 移除存储媒体umount ls命令用于显示文件目录列表, ...
- 自学Zabbix6.1 Event acknowledgment 事件确认
自学Zabbix6.1 Event acknowledgment 事件确认 1 概述以往服务器出现报警,运维人员处理完事之后,报警自动取消,但是下一次出现同样一个错误,但是换了一个运维人员,他可能需要 ...
- 【bzoj4818】 Sdoi2017—序列计数
http://www.lydsy.com/JudgeOnline/problem.php?id=4818 (题目链接) 题意 一个长度为$n$的序列,每个元素是不超过$m$的正整数,且这$n$个数的和 ...