ROS基本程序实现
0.前言
现在介绍ROS基本程序实现的教程有很多,步骤无非就是建工作空间,编译,创建功能包,创建文件和修改CMakeList,之后再编译、运行程序这几步。但是这些教程中很多在文件夹切换的很混乱,导致会出现一堆奇奇怪怪的错误,其实只要注意你操作的文件夹位置,很多问题都不是问题。这也是博主为什么写这篇文章的原因。
1.实现步骤
(1)创建工作空间并初始化
lxb@lxb-virtual-machine:~/study_ros$ mkdir -p my_workspace/src
lxb@lxb-virtual-machine:~/study_ros$ cd my_workspace/
lxb@lxb-virtual-machine:~/study_ros/my_workspace$ catkin_make
注意:
我的工作空间文件夹位置为:~/study_ros/my_workspace/
(2)进入 src 创建功能包并添加依赖
lxb@lxb-virtual-machine:~/study_ros/my_workspace$ cd src
lxb@lxb-virtual-machine:~/study_ros/my_workspace/src$ catkin_create_pkg my_function_package roscpp rospy std_msgs
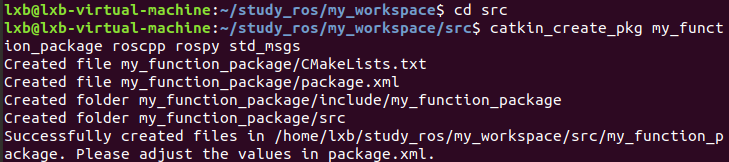
注意:
我的功能包文件夹位置为:~/study_ros/my_workspace/src/my_function_package
以后的操作大多数都是在功能包中进行的,除了catkin_make编译
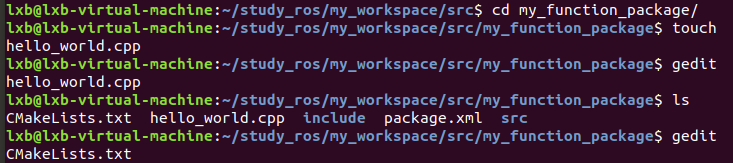
(3)进入功能包的 src 目录创建编辑核心代码hello_world.cpp
lxb@lxb-virtual-machine:~/study_ros/my_workspace/src$ cd my_function_package/
lxb@lxb-virtual-machine:~/study_ros/my_workspace/src/my_function_package$ touch hello_world.cpp
lxb@lxb-virtual-machine:~/study_ros/my_workspace/src/my_function_package$ gedit hello_world.cpp
注意:
hello_world.cpp的内容为:
#include "ros/ros.h"
int main(int argc, char *argv[])
{
//执行 ros 节点初始化
ros::init(argc,argv,"hello");
//创建 ros 节点句柄
ros::NodeHandle n;
//控制台输出 hello world
ROS_INFO("hello world!");
return 0;
}
(4)编辑功能包下的 Cmakelist.txt文件
lxb@lxb-virtual-machine:~/study_ros/my_workspace/src/my_function_package$ gedit CMakeLists.txt

编辑方式:
找到Cmakelist.txt文件下面对应的部分,去掉前面#注释,并将内容改为如下所示,其中hello_world_newname为hello_world.cpp的映射名,随便写,但是建议写成和hello_world.cpp同名,也就是hello_world
add_executable(hello_world_newname src/hello_world.cpp)
target_link_libraries(hello_world_newname
${catkin_LIBRARIES}
)
(5)进入工作空间目录并编译

编译成功截图
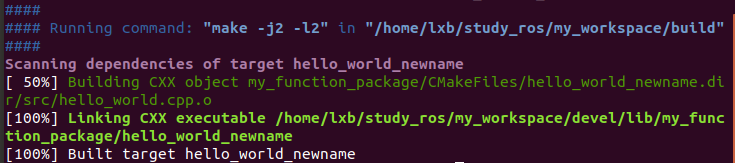
注意:
若编译失败,再重新走一遍流程,一般都是流程出错
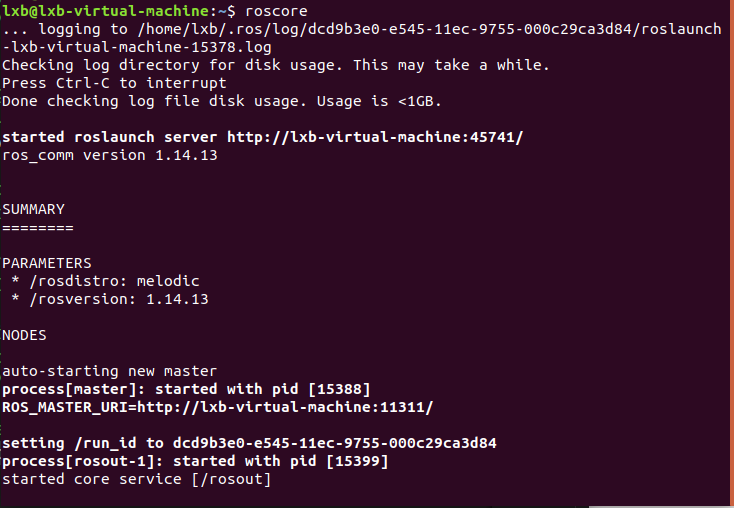
(6)刷新环境并执行程序
1.先打开一个新终端,运行roscore
lxb@lxb-virtual-machine:~$ roscore
2.在原来的终端下刷新环境并执行程序
lxb@lxb-virtual-machine:~/study_ros/my_workspace$ source ./devel/setup.bash
lxb@lxb-virtual-machine:~/study_ros/my_workspace$ rosrun my_function_package hello_world_newname

2.后言
这个在我稀稀拉拉学ros多年,终于把它给搞懂了,这里对于新学习ROS的同学,可以看下这个教程http://www.autolabor.com.cn/book/ROSTutorials/ ,这个教程给了我很多的启发。如果有什么问题,也欢迎大家评论去交流,最后祝大家可以ROS顺利!
ROS基本程序实现的更多相关文章
- 创建ros的程序包--3
创建ros的程序包(原创博文,转载请标明出处--周学伟http://www.cnblogs.com/zxouxuewei/) 1.一个catkin程序包由什么组成? 一个程序包要想称为catkin程序 ...
- ROS学习笔记三:编写第一个ROS节点程序
在编写第一个ROS节点程序之前需要创建工作空间(workspace)和功能包(package). 1 创建工作空间(workspace) 创建一个catkin_ws: #注意:如果使用sudo一次 ...
- ROS 笔记 程序包/节点/topic
官方教程: wiki.ros.org/cn/ROS/tutorials 程序包打创建于编译 创建程序包 在工作空间的src底下,输入如下命令: $ catkin_create_pkg 要创建的包名 依 ...
- ROS:使用Qt Creator创建GUI程序(一)
开发环境: Ubuntu14.04 ROS indigo version Qt Creator 3.0.1 based on Qt 5.2.1 步骤如下:(按照下面命令一步步来,亲测可行) (一)安装 ...
- ROS Learning-018 Arduino-For-ROS-003 (总结篇) 模板程序 即 如何运行
Arduino For ROS-003 - (总结篇) 模板程序 即 如何运行 我的Ubuntu系统:Ubuntu 14.04.10 TLS 32位 Arduino的版本:Arduino 1.6.11 ...
- ROS Learning-017 Arduino-For-ROS-002 第一个程序: Hello World
Arduino For ROS-002 - 第一个程序: Hello World 我的Ubuntu系统:Ubuntu 14.04.10 TLS 32位 Arduino的版本:Arduino 1.6.1 ...
- ROS 新手常见问题汇总
版权声明:本文为博主原创文章,转载请标明出处: http://www.cnblogs.com/liu-fa/p/5772469.html 该博文致力于汇总ROS常见问题及解答,让更多的人少走弯路,避免 ...
- 快速了解 Robot Operating System(ROS) 机器人操作系统
http://www.ros.org/ 关于ROS About ROS http://www.ros.org/about-ros/ 机器人操作系统(ROS)是用于编写机器人软件的灵活框架.目的在简化 ...
- ROS机器人程序设计(原书第2版)补充资料 (壹) 第一章 ROS系统入门
ROS机器人程序设计(原书第2版)补充资料 (壹) 第一章 ROS系统入门 书中,大部分出现hydro的地方,直接替换为indigo或jade或kinetic,即可在对应版本中使用. 第一章主要包括R ...
随机推荐
- PL/SQL中的 not
ELECT * FROM table_name WHERE column_name not like'%山%' 這時出現了column_name中為null值的情況也被剔掉了. 原因是:在SQL的表達 ...
- Qt QTableView 表格内添加控件
目录 Qt QTableView 表格内添加控件 1. QItemDelegate 2. setIndexWidget 3. setIndexWidget + setLayout Qt QTableV ...
- 修改django配置文件settings
默认带数据库sqlite DATABASES = { 'default': { 'ENGINE': 'django.db.backends.sqlite3', 'NAME': os.path.join ...
- 深度理解springboot集成cache缓存之源码解析
一.案例准备 1.创建数据表(employee表) 2.创建Employee实体类封装数据库中的数据 @AllArgsConstructor @NoArgsConstructor @Data @ToS ...
- Servlet 3.1学习笔记
Servlet 3.1学习笔记 参考文档 Servlet 3.1标准 什么是 Servlet ? Servlet 是基于 Java 平台的 Web 组件,由一个容器管理,能够生成动态内容. 什么是 S ...
- socket套接字模块及黏包现象
一.socket套接字模块 socket概念 socket层 理解socket Socket是应用层与TCP/IP协议族通信的中间软件抽象层,它是一组接口.在设计模式中,Socket其实就是一个门面模 ...
- RTSP可用网络流
推荐个音视频学习的网站 https://www.zzsin.com,里面有音视频学习资料和测试视频提供下载B站搜乔红 rtsp://wowzaec2demo.streamlock.net/vod/mp ...
- AcWing周赛43
AcWing周赛43 题源:https://www.acwing.com/activity/content/1233/ 4314. 三元组 直接暴力做就是了,我一开始还在找规律..悲 我滴代码 #in ...
- 从小白到侠客的 Windows 快捷键宝典
"天下 武功,唯快不破."你是否羡慕过那些电脑键盘侠客,他们操作起电脑行云流水,任务完成的又快又准.这到底是怎么做到的呢?我们是否也能向他们一样达到把键盘操作熟记于心呢?那就跟着笔 ...
- python基础练习题(题目 学习使用auto定义变量的用法)
day28 --------------------------------------------------------------- 实例042:变量作用域 题目 学习使用auto定义变量的用法 ...