ROS-URDF-活动关节
前言:介绍活动关节,并使机器人活动起来。
参考自:http://wiki.ros.org/urdf/Tutorials/Building%20a%20Movable%20Robot%20Model%20with%20URDF
一、修改urdf文件
<?xml version="1.0"?>
<robot name="visual">
<material name="blue">
<color rgba="0 0 0.8 1"/>
</material>
<material name="black">
<color rgba="0 0 0 1"/>
</material>
<material name="white">
<color rgba="1 1 1 1"/>
</material>
<link name="base_link">
<visual>
<geometry>
<cylinder length="0.6" radius="0.2"/>
</geometry>
<material name="blue"/>
</visual>
</link>
<link name="right_leg">
<visual>
<geometry>
<box size="0.6 0.1 0.2"/>
</geometry>
<origin rpy="0 1.57075 0" xyz="0 0 -0.3"/>
<material name="white"/>
</visual>
</link>
<joint name="base_to_right_leg" type="fixed">
<parent link="base_link"/>
<child link="right_leg"/>
<origin xyz="0 -0.22 0.25"/>
</joint>
<link name="right_base">
<visual>
<geometry>
<box size="0.4 0.1 0.1"/>
</geometry>
<material name="white"/>
</visual>
</link>
<joint name="right_base_joint" type="fixed">
<parent link="right_leg"/>
<child link="right_base"/>
<origin xyz="0 0 -0.6"/>
</joint>
<link name="right_front_wheel">
<visual>
<origin rpy="1.57075 0 0" xyz="0 0 0"/>
<geometry>
<cylinder length="0.1" radius="0.035"/>
</geometry>
<material name="black"/>
<origin rpy="0 0 0" xyz="0 0 0"/>
</visual>
</link>
<joint name="right_front_wheel_joint" type="continuous">
<axis rpy="0 0 0" xyz="0 1 0"/>
<parent link="right_base"/>
<child link="right_front_wheel"/>
<origin rpy="0 0 0" xyz="0.133333333333 0 -0.085"/>
</joint>
<link name="right_back_wheel">
<visual>
<origin rpy="1.57075 0 0" xyz="0 0 0"/>
<geometry>
<cylinder length="0.1" radius="0.035"/>
</geometry>
<material name="black"/>
</visual>
</link>
<joint name="right_back_wheel_joint" type="continuous">
<axis rpy="0 0 0" xyz="0 1 0"/>
<parent link="right_base"/>
<child link="right_back_wheel"/>
<origin rpy="0 0 0" xyz="-0.133333333333 0 -0.085"/>
</joint>
<link name="left_leg">
<visual>
<geometry>
<box size="0.6 0.1 0.2"/>
</geometry>
<origin rpy="0 1.57075 0" xyz="0 0 -0.3"/>
<material name="white"/>
</visual>
</link>
<joint name="base_to_left_leg" type="fixed">
<parent link="base_link"/>
<child link="left_leg"/>
<origin xyz="0 0.22 0.25"/>
</joint>
<link name="left_base">
<visual>
<geometry>
<box size="0.4 0.1 0.1"/>
</geometry>
<material name="white"/>
</visual>
</link>
<joint name="left_base_joint" type="fixed">
<parent link="left_leg"/>
<child link="left_base"/>
<origin xyz="0 0 -0.6"/>
</joint>
<link name="left_front_wheel">
<visual>
<origin rpy="1.57075 0 0" xyz="0 0 0"/>
<geometry>
<cylinder length="0.1" radius="0.035"/>
</geometry>
<material name="black"/>
</visual>
</link>
<joint name="left_front_wheel_joint" type="continuous">
<axis rpy="0 0 0" xyz="0 1 0"/>
<parent link="left_base"/>
<child link="left_front_wheel"/>
<origin rpy="0 0 0" xyz="0.133333333333 0 -0.085"/>
</joint>
<link name="left_back_wheel">
<visual>
<origin rpy="1.57075 0 0" xyz="0 0 0"/>
<geometry>
<cylinder length="0.1" radius="0.035"/>
</geometry>
<material name="black"/>
</visual>
</link>
<joint name="left_back_wheel_joint" type="continuous">
<axis rpy="0 0 0" xyz="0 1 0"/>
<parent link="left_base"/>
<child link="left_back_wheel"/>
<origin rpy="0 0 0" xyz="-0.133333333333 0 -0.085"/>
</joint>
<joint name="gripper_extension" type="prismatic">
<parent link="base_link"/>
<child link="gripper_pole"/>
<limit effort="1000.0" lower="-0.38" upper="0" velocity="0.5"/>
<origin rpy="0 0 0" xyz="0.19 0 0.2"/>
</joint>
<link name="gripper_pole">
<visual>
<geometry>
<cylinder length="0.2" radius="0.01"/>
</geometry>
<origin rpy="0 1.57075 0 " xyz="0.1 0 0"/>
</visual>
</link>
<joint name="left_gripper_joint" type="revolute">
<axis xyz="0 0 1"/>
<limit effort="1000.0" lower="0.0" upper="0.548" velocity="0.5"/>
<origin rpy="0 0 0" xyz="0.2 0.01 0"/>
<parent link="gripper_pole"/>
<child link="left_gripper"/>
</joint>
<link name="left_gripper">
<visual>
<origin rpy="0.0 0 0" xyz="0 0 0"/>
<geometry>
<mesh filename="package://urdf_tutorial/meshes/l_finger.dae"/>
</geometry>
</visual>
</link>
<joint name="left_tip_joint" type="fixed">
<parent link="left_gripper"/>
<child link="left_tip"/>
</joint>
<link name="left_tip">
<visual>
<origin rpy="0.0 0 0" xyz="0.09137 0.00495 0"/>
<geometry>
<mesh filename="package://urdf_tutorial/meshes/l_finger_tip.dae"/>
</geometry>
</visual>
</link>
<joint name="right_gripper_joint" type="revolute">
<axis xyz="0 0 -1"/>
<limit effort="1000.0" lower="0.0" upper="0.548" velocity="0.5"/>
<origin rpy="0 0 0" xyz="0.2 -0.01 0"/>
<parent link="gripper_pole"/>
<child link="right_gripper"/>
</joint>
<link name="right_gripper">
<visual>
<origin rpy="-3.1415 0 0" xyz="0 0 0"/>
<geometry>
<mesh filename="package://urdf_tutorial/meshes/l_finger.dae"/>
</geometry>
</visual>
</link>
<joint name="right_tip_joint" type="fixed">
<parent link="right_gripper"/>
<child link="right_tip"/>
</joint>
<link name="right_tip">
<visual>
<origin rpy="-3.1415 0 0" xyz="0.09137 0.00495 0"/>
<geometry>
<mesh filename="package://urdf_tutorial/meshes/l_finger_tip.dae"/>
</geometry>
</visual>
</link>
<link name="head">
<visual>
<geometry>
<sphere radius="0.2"/>
</geometry>
<material name="white"/>
</visual>
</link>
<joint name="head_swivel" type="continuous">
<parent link="base_link"/>
<child link="head"/>
<axis xyz="0 0 1"/>
<origin xyz="0 0 0.3"/>
</joint>
<link name="box">
<visual>
<geometry>
<box size="0.08 0.08 0.08"/>
</geometry>
<material name="blue"/>
</visual>
</link>
<joint name="tobox" type="fixed">
<parent link="head"/>
<child link="box"/>
<origin xyz="0.1814 0 0.1414"/>
</joint>
</robot>
----------------------------------------------------------
代码解析:
<joint name="head_swivel" type="continuous">关节为连续型
<parent link="base_link"/>
<child link="head"/>
<axis xyz="0 0 1"/>限制只绕z轴旋转
<origin xyz="0 0 0.3"/>
</joint>
<joint name="left_gripper_joint" type="revolute">关节为旋转型
<axis xyz="0 0 1"/>
<limit effort="1000.0" lower="0.0" upper="0.548" velocity="0.5"/>限定最大力度1000N,绕z周旋转弧度为0弧度-0.548弧度,最大速度为0.5m/s
<origin rpy="0 0 0" xyz="0.2 0.01 0"/>
<parent link="gripper_pole"/>
<child link="left_gripper"/>
</joint>
<joint name="gripper_extension" type="prismatic">关节类型为棱柱型,只能沿着轴移动,不能沿着轴转动。
<parent link="base_link"/>
<child link="gripper_pole"/>
<limit effort="1000.0" lower="-0.38" upper="0" velocity="0.5"/>
<origin rpy="0 0 0" xyz="0.19 0 0.2"/>
</joint>
二、运行launch文件
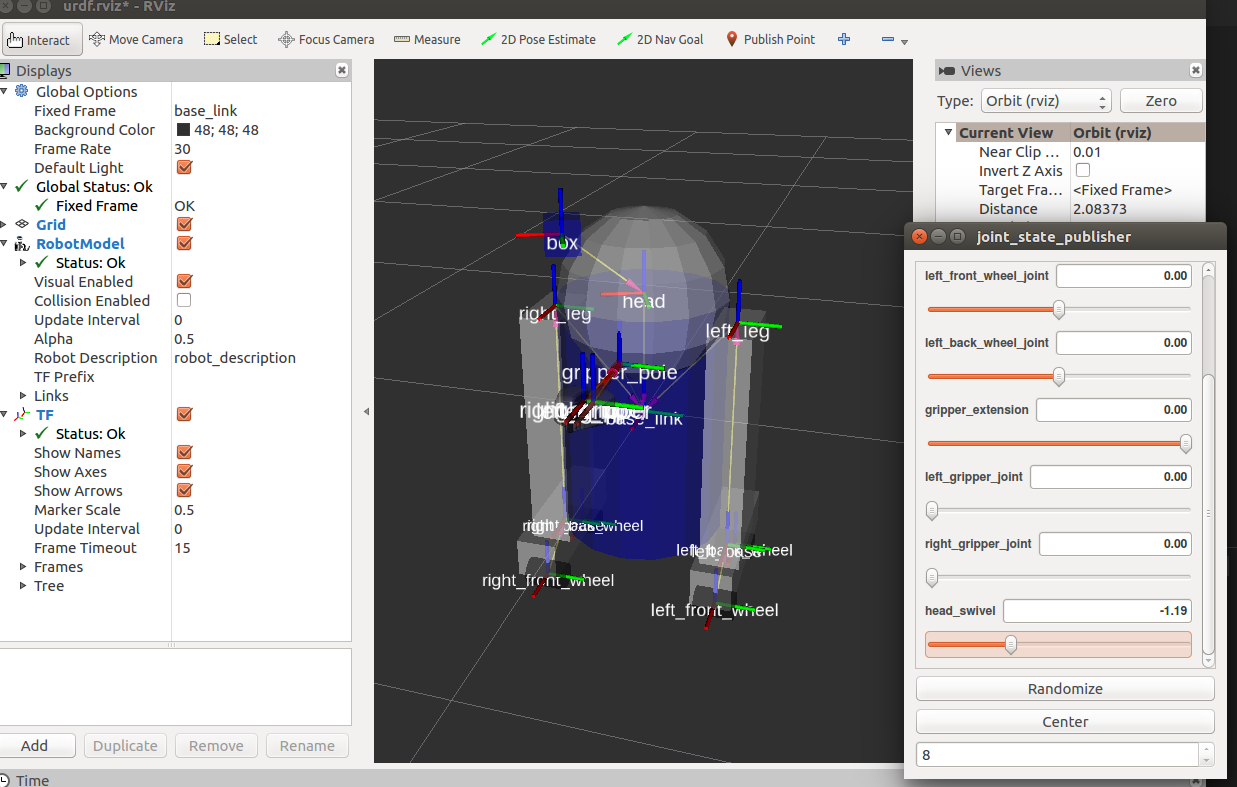
当您在GUI中移动滑块时,模型将在Rviz中移动。这是怎么做到的?首先,GUI解析URDF并找到所有非固定关节及其限制。然后,它使用滑块的值来发布sensor_msgs / JointState消息。然后robot_state_publisher使用它们来计算不同部分之间的所有变换。然后,生成的变换树用于显示Rviz中的所有形状。
-END-
ROS-URDF-活动关节的更多相关文章
- ROS(URDF机器人建模)
新建功能包mbot_description 在功能包下新建文件config,launch,meshes,urdf. 在launch文件夹下新建文件display_mbot_base_urdf.laun ...
- ROS urdf和xacro文件详解
视觉标签:visual <visual> <origin xyz="0.0 0.0 0.0" /> <geometry> <box siz ...
- 2017~ROS暑期学校~分享
http://www.robotics.sei.ecnu.edu.cn/ROS2017/ ---- 往年暑期学校活动:2015年,2016年 报名开始时间7月2日晚10点:暑期学校报名,机器人挑战赛报 ...
- Gazebo機器人仿真學習探索筆記(七)连接ROS
中文稍后补充,先上官方原版教程.ROS Kinetic 搭配 Gazebo 7 附件----官方教程 Tutorial: ROS integration overview As of Gazebo 1 ...
- 【探索之路】机器人篇(3)-给mwRobot建立模型
在创建一个mwRobot_description程序包那一节中,我们添加了依赖roscpp rospy std_msgs 和 urdf , 现在我们再添加一个xacro依赖. 如何添加依赖? 打开程 ...
- 多指灵巧手MoveIt!与Gazebo联合仿真框架搭建
至于为什么叫框架,一是因为灵巧手的3维模型没有按照基本的设计要求画,正常来说,设计机器人机构之前应该设计好机构需要多少个自由度/DOF,每个自由度是旋转/revolute类型还是滑移/prismati ...
- 软件篇-02-基于ZED 2和ORB_SLAM2的SLAM实践
时隔两周,我又回来了. 本期内容如题,ZED 2的SDK功能还是挺多的,包括轨迹跟踪,实时建图等等.虽然由于是商业产品,我看不到他们的源代码,但是根据使用情况来看,ZED 2内部是采用了IMU和光 ...
- <ROS> 机器人描述--URDF和XACRO
文章转自 https://blog.csdn.net/sunbibei/article/details/52297524 特此鸣谢原创作者的辛勤付出 1 URDF 文件 1.1 link和joint ...
- ROS(机器人URDF模型优化)
URDF模型 xacro优化后的URDF模型 1.精简模型代码(创建宏定义,文件包含) 2.提供可编程接口(常量,变量,数学计算,条件语句) 常量定义: name:base_length的值value ...
随机推荐
- 【原】Pchart生成图片
学习网址: http://wiki.pchart.net/doc.introduction.html http://pchart.sourceforge.net/index.php
- 创建pod索引库(Specs)
专门用来存放xxx.podspec 的索引文件的库就叫做索引库.我们需要将这些索引文件上传到远程索引库才能保证其他的人能够拿来用. 创建一个远程索引库和本地索引库对应起来,步骤如下: 1.登录开源中国 ...
- WebService附加到IIS调试,未命中断点
写好了一个WebService,部署到IIS上,用浏览器访问发现并不能命中断点. 经过多次的查找发现是由于附加的代码类型选择错误. 下图由于错误的选择了托管代码,导致调试时不命中断点,勾选自动解决.
- Luogu P2298 Mzc和男家丁的游戏
Mzc和男家丁的游戏 题目背景 mzc与djn的第二弹. 题目描述 mzc家很有钱(开玩笑),他家有n个男家丁(做过上一弹的都知道).他把她们召集在了一起,他们决定玩捉迷藏.现在mzc要来寻找他的男家 ...
- Django cookie、session使用
一.cookie Cookie是key-value结构,类似于一个python中的字典.随着服务器端的响应发送给客户端浏览器.然后客户端浏览器会把Cookie保存起来,当下一次再访问服务器时把Cook ...
- 3 numpy模块
Numpy 什么是Numpy:Numeric Python Numpy模块是Python的一种开源的数值计算扩展. 1 一个强大的N维数组对象Array ...
- C#关键字详解第六节
3.28 日志记录:前段时间参加技能大赛,所以未更新博客,特此补上,第一次写博客,希望自己认真下去,努力,天道酬勤! 比赛给我的感悟很深!古语云:山外有山,强中自有强中手! do:执行语句 说do之前 ...
- Master Nginx(6) - The Nginx HTTP Server
Nginx's architecture The HTTP core module The server Logging Finding files Name resolution Client in ...
- hdu_1061_Rightmost Digit_201311071851
Rightmost Digit Time Limit: 2000/1000 MS (Java/Others) Memory Limit: 65536/32768 K (Java/Others) ...
- cogs 7. 通信线路
7. 通信线路 ★★ 输入文件:mcst.in 输出文件:mcst.out 简单对比时间限制:1.5 s 内存限制:128 MB 问题描述 假设要在n个城市之间建立通信联络网,则连通n ...