ROS-OPENCV
前言:opencv是一个开源的跨平台计算机视觉库。
前提:1.已下载并编译了相关功能包集,如还未下载,可通过git下载:https://github.com/huchunxu/ros_exploring.git
2.安装了usb摄像头驱动,如还未安装,可参考:https://www.cnblogs.com/chendeqiang/p/10217099.html
一、安装opencv
- sudo apt-get install ros-kinetic-vision-opencv libopencv-dev python-opencv
二、在ROS中使用opencv
cv_bridge是一种图片格式转换的中间商,可以将ros中的图像格式转化为opencv中的格式。
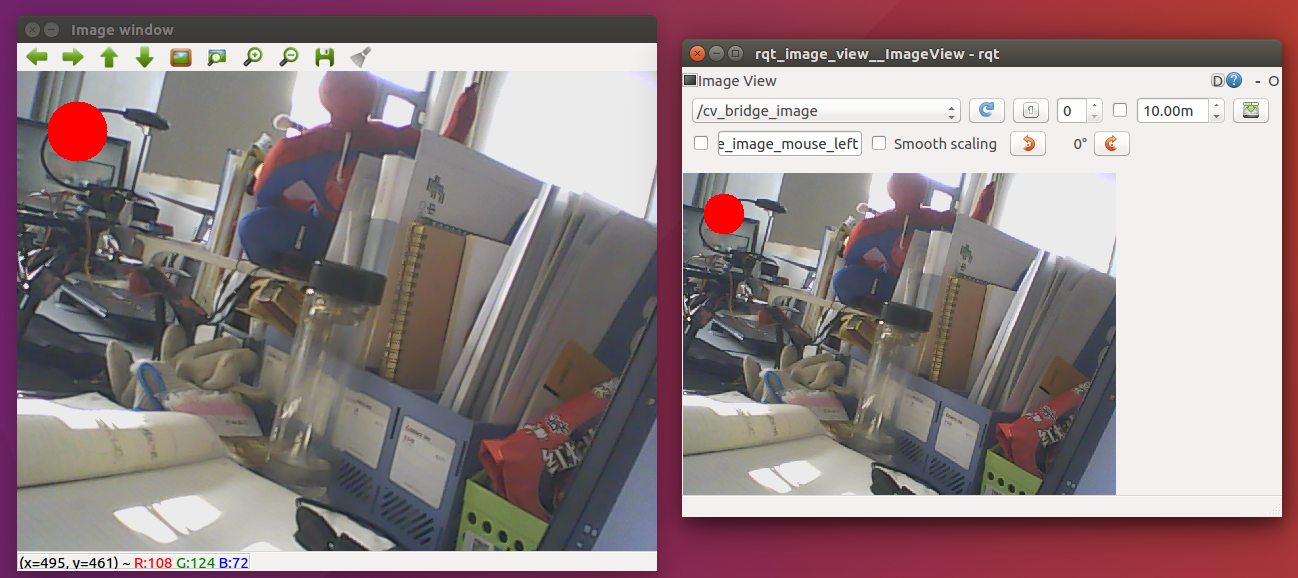
演示内容:从摄像头获取图像,转化成opencv格式显示,再转化成ros图像格式显示。
2.1 单独编译<<ROS机器人开发实践>> /robot_perception/robot_vision功能包
2.2 启动例程
- roslaunch robot_vision usb_cam.launch
- rosrun robot_vision cv_bridge_test.py
- rqt_image_view
--------------------------------
效果如下:
-END-
ROS-OPENCV的更多相关文章
- OpenCV入门学习笔记
OpenCV入门学习笔记 参照OpenCV中文论坛相关文档(http://www.opencv.org.cn/) 一.简介 OpenCV(Open Source Computer Vision),开源 ...
- 颜色追踪块CamShift---33
原创博客:转载请标明出处:http://www.cnblogs.com/zxouxuewei/ 颜色追踪块CamShift滤波器. 首先确保你的kinect驱动或者uvc相机驱动能正常启动:(如果你使 ...
- Ubuntu配置ORB-SLAM2过程中的问题
https://www.imooc.com/article/details/id/29136 1. 提示“CMAKE_CXX_COMPILER-NOTFOUND ” 具体形式: Check for w ...
- Jetson tk1 刷机后要做的几件事
参考简书文章: http://www.jianshu.com/p/997ede860d74 1. 查看Jetson TK1 L4T版本 head -n 1 /etc/nv_tegra_release ...
- slam学习
学习内容: 数学: 线性代数,概率论, 优化理论,离散数学, 李代数, 凸优化: 算法: 概率机器人, 机器人状态估计, 深度学习,非线性优化: 工程: c/c++ , python, ros, ...
- 相机标定 matlab opencv ROS三种方法标定步骤(3)
三 , ROS 环境下 如何进行相机标定 刚开始做到的时候遇到一些问题没有记录下来,现在回头写的时候都是没有错误的结果了,首先使用ROS标定相机, 要知道如何查看节点之间的流程图 rosrun r ...
- 相机标定 matlab opencv ROS三种方法标定步骤(1)
一 . 理解摄像机模型,网上有很多讲解的十分详细,在这里我只是记录我的整合出来的资料和我的部分理解 计算机视觉领域中常见的三个坐标系:图像坐标系,相机坐标系,世界坐标系,实际上就是要用矩阵来表 示各个 ...
- 深度图从ros数据类型转换成opencv数据类型
摘要:ros下,利用realsense D435采集深度图,并将其转换成opencv的数据类型. 一. RGBD图像采集 通过image_transport包,根据给定的采集速度从realsense ...
- 关于ros将opencv版本固定“写死”的一些想法
今天主要工作是将ros和zed结合起来,但是发现自己安装了opencv3.1,ros indigo安装的是opencv2.4.8,这就麻烦了,zed支持的是opencv3.1.一开始使用slam2时, ...
- 在ROS中使用OpenCV
1.在工作空间下创建程序包 $ cd ~/catkin_ws/src$ catkin_create_pkg robot_vision roscpp std_msgs cv_bridge image_t ...
随机推荐
- Eclipse中Git的基本使用
以下所有命令如没有特殊说明,均在命令行中完成(cmd窗口) 1.全局设定(需要告诉git自己是谁) git config --global user.name "你的名字或昵称&quo ...
- switch注意事项
Day03_SHJavaTraining_4-5-2017 switch注意事项:①switch语句接受的数据类型 switch语句中的表达式的数据类型,是有要求的 JDK1.0 - 1.4 数 ...
- ANN:DNN结构演进History—LSTM_NN
前言 语音识别和动作识别(Action.Activities) 等一些时序问题,通过微分方式可以视为模式识别方法中的变长模式识别问题.语音识别的基元为音素.音节,字母和句子模式是在时间轴上的变长序列 ...
- 创建一个dynamics CRM workflow (三) - Creating Configuration Entity for Custom Workflow
上个帖子中, 我们创建了个发email的workflow. 但是我们邮件当中的tax 值是 hard code, 这在开发当中是不容许的. 那今天我们来把这个build in workflow用 in ...
- hibernate一对多和多对一配置
public class Dept { private int deptId; private String deptName; // [一对多] 部门对应的多个员工 private Set<E ...
- nginx日志按日期自动切割脚本
#!/bin/bash #nginx日志切割脚本 #author:setevn #设置日志文件存放目录 logs_path="/usr/local/nginx/logs/" #设置 ...
- jq DataTable
DataTables(http://datatables.club/index.html)应该是我到目前为止见过的,功能最强大的表格解决方案(当然,不计算其它整套框架中的table控件在内). 先把它 ...
- 用SufaceGO加微软全家桶做个遥控车(一)
作为一个dotnet技术的新手我是不好意思写帖子的,原因就是本人技术太水了,写出的帖子肯定会让人笑话.所以这次我是厚着脸皮写出这个帖子的,希望大佬们轻喷了.我的目标就是用SurfaceGo实现一个和我 ...
- Vue学习之路第十七篇:全局过滤器的使用
1.过滤器 ①:Vue.js 允许你自定义过滤器,可被用于一些常见的文本格式化.过滤器可以用在两个地方:插值表达式和 v-bind 表达式 (后者从 2.1.0+ 开始支持).过滤器应该被添加在 Ja ...
- [SCOI2016]萌萌哒(倍增+并查集)
当区间\([a,b]\)和\([c,d]\)对应相等时. 我们把两个区间对应位置上的数所在并查集合并. 最后并查集的数量为\(num\)答案就是\(9*10^num\)因为是个数,不能有前置\(0\) ...