[Fundamental of Power Electronics]-PART II-9. 控制器设计-9.6 环路增益的测量/9.7 本章小结
9.6 环路增益的测量
测量原型反馈系统的环路增益是一个非常好的工程实践。这种实践的目的是验证系统是否被正确地建模。如果是的,那么已经应用了良好控制器设计的系统,其特性将满足相关瞬态过冲(相角裕度),干扰抑制,直流电压输出等方面的期望。不幸的是,总有一些原因导致实际系统与理论模型不同。可能会出现原始系统中无法解释的现象,并且严重影响系统的特性。可能存在噪声和电磁干扰(EMI),这会导致系统传递函数以意想不到的方式偏移。
因此,让我们来考虑图9.46所示反馈系统的环路增益\(T(s)\)的测量。我们将在某个点A(网络的两个电气连接点)上进行测量。在图9.46中,块1的输出端口由戴维南等效网络表示,该网络由受控电压源\(G_{1}\hat{v}_{e}\)和输出阻抗\(Z_{1}\)组成。块1的负载是块2的输入阻抗\(Z_{2}\)。反馈系统的其余部分由所示的框图表示。系统的环路增益为:
\]
该环路增益的测量提出了其他频率响应测量中不存在的几个挑战。
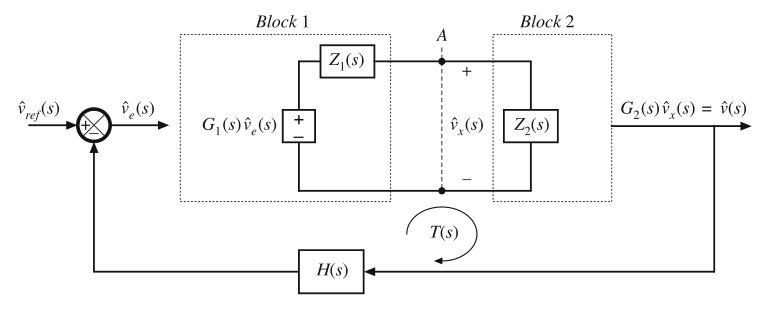
Fig. 9.46 It is desired to determine the loop gain T(s) experimentally, by making measurements at point A
原则上,可以在A点打破环路,并尝试使用前述章节的传递函数测量方法来测量\(T(s)\)。如图9.47所示,将使用直流电源电压\(V_{CC}\)和电位计在电压\(v_{x}\)中建立直流偏置,从而使得网络中所有元件都在正确的静态工作点。\(v_{z}(t)\)中的交流电压变化通过隔直电容耦合到注入点。系统其它任何独立交流输入都被禁止。网络分析以用于测量电压\(v_{y}(t)\)和\(v_{x}(t)\)交流分量的相对幅值和相位:
\]
图为:
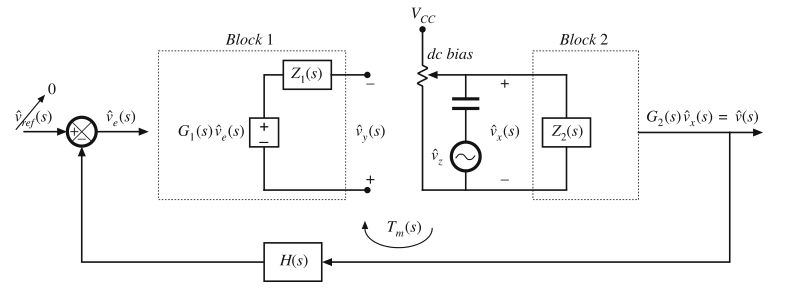
Fig. 9.47 Measurement of loop gain by breaking the loop
测得的增益\(T_{m}(s)\)与实际增益\(T(s)\)是不同的,因为通过断开测量点上块1和块2之间的连接,我们消除了块2在块1上的负载。图9.47的测量增益\(T_{m}(s)\)为:
\]
公式(9.83)和(9.85)结合,可以用\(T(s)\)来表示\(T_{m}(s)\):
\]
因此:
\]
因此,为了获得准确的测量结果,我们需要找到一个在待测频率范围内负载可忽略不计的注入点。
使用图9.47所示的方法会遇到其他的问题。最严重的的问题就是利用电位计调节直流偏置。直流环路增益通常非常大,尤其是在使用PI控制器时。因此,\(v_{x}(t)\)直流分量的微小变化会导致系统中某些元件的直流偏置发生非常大的变化。所以很难在电路中建立合适的直流条件。在实验期间,直流增益可能会发生漂移,从而使问题更加严重,并且误差放大器的饱和也是常见的问题。并且,我们已经看到,变换器的增益可以是静态工作点的函数。与正确工作点的显著偏差可能导致测得的增益与实际工作条件的环路增益不同。
9.6.1 电压注入
避免直流偏置问题的方法如图9.48所示。电压源\(v_{z}(t)\)注入到块1和块2之间,而不会打破反馈环路。\(v_{z}(t)\)的交流变化再次引起反馈系统中的变化,但直流偏置条件由电路决定。实际上,如果\(v_{z}(t)\)不包含直流分量,那么系统本身的偏置电路将建立静态工作点。因此,环路增益的测量是在实际的系统工作点进行的。
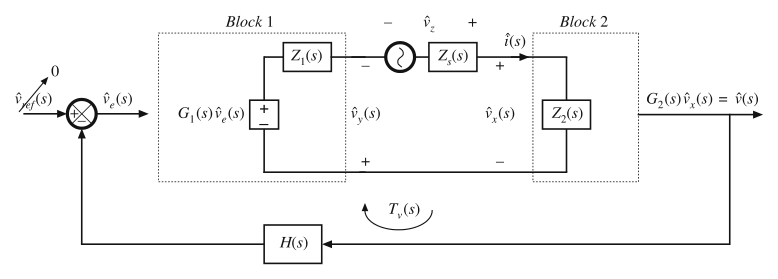
Fig. 9.48 Measurement of loop gain by voltage injection
在图9.48中,通过戴维南等效网络对注入源进行建模,这个网络包含了一个具有阻抗\(Z_{s}(s)\)的独立电压源。\(v_{z}\)和\(Z_{s}\)的大小与环路增益无关。但是,\(v_{z}\)的注入破坏了块2在块1上的加载。因此,必须找到合适的注入点,此时加载的效果可以忽略不计。
为了通过电压注入的方法来测量环路增益,我们连接网络分析仪来测量\(\hat{v}_{x}\)到\(\hat{v}_{y}\)的传递函数。系统的独立交流输入设置为0,网络分析仪在预期频率范围内扫描注入电压\(\hat{v}_{z}(t)\)。测得的增益为:
\]
让我们来求解图9.48,将测得的实际增益\(T_{v}(s)\)与式(9.83)给出的实际环路增益\(T(s)\)比较。误差为:
\]
电压\(\hat{v}_{y}\)可以写为:
\]
其中\(\hat{i}(s)Z_{1}(s)\)是阻抗\(Z_{1}\)上的压降。将式(9.89)代入式(9.90)得到:
\]
但是\(\hat{i}(s)\)为:
\]
因此,式(9.91)变为:
\]
将式(9.93)代入式(9.88)可以得到如下所示测量增益\(T_{v}(s)\)的表达式:
\]
式(9.83)和(9.94)可以结合来用实际环路增益\(T(s)\)表示测量增益\(T_{v}(s)\):
\]
因此,\(T_{v}(s)\)可以表示为两项之和。第一项可以表示为正比于实际环路增益\(T(s)\),并且在\(||Z_{1}||< <||Z_{2}||\)时近似等于\(T(s)\)。第二项并不是正比于\(T(s)\),其限制了可以用电压注入技术测量的最小的\(T(s)\)。如果\(Z_{1}/Z_{2}\)在幅值上远小于\(T(s)\),那么第二项可以忽略,并且\(T_{v}(s)=T(s)\)。在\(T(s)\)的幅值小于\(Z_{1}/Z_{2}\)的频率范围内,必须丢弃测量数据。因此:
\]
并且基于:
& (i)\ \ ||Z_{1}(s)||< < ||Z_{2}(s)|| \\
& (ii)\ \ ||T(s)||> > \cfrac{Z_{1}(s)}{Z_{2}(s)}
\end{aligned}
\]
再次注意,注入源阻抗\(Z_{s}\)是无关紧要的。
作为一个例子,考虑在运算放大器的输出端注入电压,其输出阻抗为50 Ω,可驱动500 Ω的负载。注入点附近的系统如图9.49所示。因此,\(Z_{1}(s)=50 \Omega\)以及\(Z_{2}(s)=500\Omega\)。比值\(Z_{1}/Z_{2}\)为0.1或者说是-20dB。让我们进一步假设,实际环路增益\(T(s)\)包含10 Hz和100 kHz的极点,并且直流增益为80 dB。实际环路增益幅值如图9.50所示。

Fig. 9.49 V oltage injection example
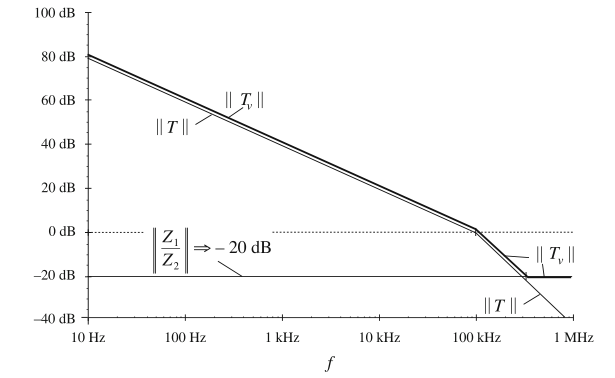
Fig. 9.50 Comparison of measured loop gain Tv and actual loop gain T, voltage injection example. The measured gain deviates at high frequency
电压注入使得测量\(T_{v}(s)\)由式(9.95)给出,注意到:
\]
因此,对于很大的\(||T||\),测量的\(||T_{v}||\)与实际的环路增益偏差值小于1 dB。然而,高频处\(||T||\)小于-20 dB,测得的增益有很大的差别。显然,\(T_{v}(s)\)中包含\(T(s)\)中不存在的高频零点。取决于这些零点的\(Q\)因子,\(T_{v}\)在穿越频率附近的相角可能会受到影响。为了确保正确测量相角裕度,重要的就是要\(Z_{1}/Z_{2}\)的大小足够小。
9.6.2 电流注入
前面的结果也可以以另一种形式获得,其中环路增益通过电流注入来测量。如图9.51所示,我们可以用诺顿等效对块1和分析仪的注入源进行建模,并且利用电流探头测量\(\hat{i}_{x}\)和\(\hat{i}_{y}\)。通过电流注入测得的增益为:
\]
图为:
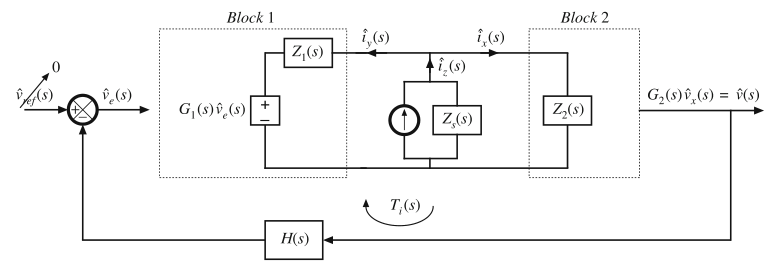
Fig. 9.51 Measurement of loop gain by current injection
可以证明:
\]
因此:
\]
并且:
& (i)\ \ ||Z_{2}(s)||< < ||Z_{1}(s)|| \\
& (ii)\ \ ||T(s)||> > \cfrac{Z_{2}(s)}{Z_{1}(s)}
\end{aligned}
\]
因此,为了通过电流注入获得对环路增益的准确测量,我们必须在网络中找到一个点,其中块2 的输入阻抗足够小。再次注意,注入源阻抗\(Z_{s}\)不会影响测量。实际上,我们可以使用如图9.52所示的戴维南等效源来实现\(i_{z}\)。网络分析仪注入源由电压源\(\hat{v}\)和输出电阻\(R_{s}\)表示。并且,插入了一个串联电容\(C_{b}\)来避免破坏注入点的直流偏置。
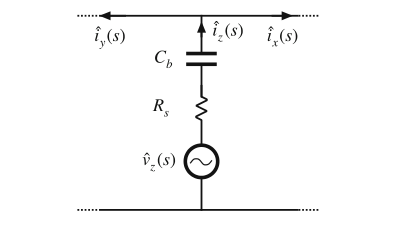
Fig. 9.52 Current injection using Thevenin-equivalent source
9.6.3 不稳定系统的测量
当原型反馈系统是不稳定的,我们甚至更希望能够测量出环路增益来找出问题所在。但是,当系统振荡时,无法进行测量。我们需要稳定系统,同时还要测量原始的不稳定的环路增益。我们知道注入源的阻抗\(Z_{s}\)不会影响测量的环路增益,利用这一点有可能实现。如图9.53所示,我们甚至可以添加额外的电阻\(R_{ext}\),从而有效的增加源阻抗\(Z_{s}\)。测量的环路增益\(T_{v}(s)\)也是不受影响的。

Fig. 9.53 Measurement of an unstable loop gain by voltage injection
增加串联阻抗通常会降低系统的环路增益,从而导致较低的穿越频率和更加"正"的相角裕度。因此,通常可添加足够大以稳定系统的电阻\(R_{ext}\)。根据式(9.96),式(9.88)中的增益\(T_{v}(s)\)仍近似等于原不稳定的环路增益。为了避免干扰直流偏置条件,可能有必要用电感\(L_{ext}\)将\(R_{ext}\)旁路。如果电感值足够大,那么不会影响修改后系统的稳定性。
9.7 要点小结
1.负反馈使系统输出根据增益\(1/H(s)\)紧随参考输入。扰动和前向通路增益变化对输出的影响也被减小了。
2.环路增益\(T(s)\)等于前向通路和反馈路径中增益的乘积。环路增益是对反馈系统工作情况的衡量:较大的环路增益可得到更好的输出调节。穿越频率\(f_{c}\)处的环路增益为单位1,其是控制系统带宽的量度。
3.反馈的引入使得扰动-输出传递函数乘以系数\(1/(1+T(s))\)。在\(T\)的幅值较大(例如:低于穿越频率时)的频率,这个系数大概等于\(1/T(s)\)。因此,低频干扰对输出的影响减小了\(1/T(s)\)。在\(T\)的幅值较小(例如:高于穿越频率)时,这个系数近似为1。然后,反馈环路将不起作用。可以使用图形化代数方法轻松构建闭环扰动-输出的传递函数,如输入-输出传递函数和输出阻抗等。
4.可以使用相位裕度来评估系统稳定性。对\(T\)在穿越频率下的相角进行评估,来推导闭环量\(T/(1+T)\)和\(1/(1+T)\)的稳定性。相角裕度不足会导致系统瞬态响应出现振铃和过冲,并导致闭环传递函数出现峰值。
5.在反馈环路的前向通道中添加补偿器可以调整环路增益,从而获得所需的性能。添加了超前补偿器(PD控制器),可以改善相角裕度,并扩展系统带宽。PI控制器可以用来增加低频环路增益,改善对低频干扰的抑制并减小稳态误差。
6.环路增益可以通过电压或电流注入来实验测量。这种方法避免了在系统中建立正确静态工作条件的问题,这是具有较大直流环路增益系统的常见困难。在级间载荷不大的地方必须找到一个注入点。并且,我们还可以测量不稳定系统的环路增益。
[Fundamental of Power Electronics]-PART II-9. 控制器设计-9.6 环路增益的测量/9.7 本章小结的更多相关文章
- [Fundamental of Power Electronics]-PART II-9. 控制器设计-9.1 引言
9.1 引言 在所有的开关变换器中,输出电压\(v(t)\)都是输入电压\(v_{g}(t)\),占空比\(d(t)\),负载电流\(i_{load}(t)\)和电路元件值的函数.在DC-DC变换器应 ...
- [Fundamental of Power Electronics]-PART II-9. 控制器设计-9.5 控制器的设计
9.5 控制器设计 现在让我们来考虑如何设计控制器系统,来满足有关抑制扰动,瞬态响应以及稳定性的规范或者说设计目标.典型的直流控制器设计可以用以下规范定义: 1.负载电流变化对输出电压调节的影响.当负 ...
- [Fundamental of Power Electronics]-PART I-1.引言-1.1 功率处理概论
1.1 功率处理概论 电力电子领域关注的是利用电子设备对电力进行处理[1–7].如图1.1所示,其中关键部件就是开关变换器.通常,开关变换器包含电源输入和控制输入端口以及电源输出端口.原始输入功率按控 ...
- [Fundamental of Power Electronics]-PART II-7. 交流等效电路建模-7.3 脉冲宽度调制器建模
7.3 脉冲宽度调制器建模 我们现在已经达成了本章开始的目标,为图7.1推导了一个有效的等效电路模型.但仍存在一个细节,对脉冲宽度调制(PWM)环节进行建模.如图7.1所示的脉冲宽度调制器可以产生一个 ...
- [Fundamental of Power Electronics]-PART II-9. 控制器设计-9.4 稳定性
9.4 稳定性 众所周知的是,增加反馈回路可能会导致原本稳定的系统变得不稳定.尽管原变换器传递函数(式(9.1))以及环路增益\(T(s)\)不包含右半平面极点,但式(9.4)的闭环传递函数仍然可能存 ...
- [Fundamental of Power Electronics]-PART II-9. 控制器设计-9.3 关键项1/(1+T)和T/(1+T)以及闭环传递函数的构建
9.3 关键项\(1/(1+T)\)和\(T/(1+T)\)以及闭环传递函数的构建 从式(9.4)到(9.9)的传递函数可以很容易的由图形代数方法进行构建.假设我们已经分析了反馈系统模块,并且已经画出 ...
- [Fundamental of Power Electronics]-PART II-9. 控制器设计-9.2 负反馈对网络传递函数的影响
9.2 负反馈对网络传递函数的影响 我们已经知道了如何推导开关变换器的交流小信号传递函数.例如,buck变换器的等效电路模型可以表示为图9.3所示.这个等效电路包含三个独立输入:控制输入变量\(\ha ...
- [Fundamental of Power Electronics]-PART I-1.引言-1.2 1.3 电力电子技术的几个应用、本书内容
1.2 电力电子技术的几个应用 高效开关变换器面临的功率范围从 (1)小于1瓦(电池供电的便携式设备内的DC-DC转换器)到(2)计算机及办公设备中的几十,几百,数千瓦到(3)变速电机驱动器中上千瓦及 ...
- [Fundamental of Power Electronics]-PART I-4.开关实现-4.1 开关应用
4.1 开关应用 4.1.1 单象限开关 理想的SPST(Single pole single throw)开关如图4.1所示.开关包含电源端子1和0,其电流和电压极性如图所示.在接通状态下,电压\( ...
随机推荐
- golang官方嵌入文件到可执行程序
目录 前言 示例程序 嵌入文件直接访问 嵌入文件列表 总结 前言 在go官方出嵌入文件的方法前我在网上找过,并且自己还研究过,虽然没有问题,但是既然官方支持还是用起来吧. 看了下go源码embed/e ...
- 力扣1052. 爱生气的书店老板-C语言实现-中等难度
题目 传送门 文本 今天,书店老板有一家店打算试营业 customers.length 分钟.每分钟都有一些顾客(customers[i])会进入书店,所有这些顾客都会在那一分钟结束后离开. 在某些时 ...
- SpringBoot整合Mybatis 使用generator自动生成实体类代码、Mapper代码、dao层代码
1.新建一个SpringBoot项目,并引入Mybatis和mybatis-generator相关的依赖. <dependency> <groupId>org.springfr ...
- SpringBoot读取配置文件的内容
1.@Value读取 在springboot项目中,如果要读取配置文件application.properties或application.yml文件的内容,可以使用自带的注解@Value.以prop ...
- matlab load函数用法 实例
一 语法: load(filename) load(filename,variables) load(filename,'-ascii') load(filename,'-mat') load(fil ...
- Docker SDK for Python
一.概述 Docker引擎API的Python库.它允许您执行docker命令所做的任何操作,但可以在Python应用程序中运行容器.管理容器.管理群集等. 官方文档: https://docker- ...
- 后端程序员之路 27、LogStash
访谈与书评:<LogStash,使日志管理更简单>http://www.infoq.com/cn/articles/review-the-logstash-book/ [Logstash] ...
- 《Linux学习笔记:文本编辑最佳实践》
[Linux文本编辑的四种方法] 例如,要想test.txt文件添加内容"I am a boy",test.txt在当前目录中 方法一:vi编辑法 [推荐] 打开终端,输入vi t ...
- 分布式文件系统FastDFS简介、搭建、与SpringBoot整合实现图片上传
之前大学时搭建过一个FastDFS的图片服务器,当时只是抱着好奇的态度搭着玩一下,当时搭建采用了一台虚拟机,tracker和storage服务在一台机器上放着,最近翻之前的博客突然想着在两台机器上搭建 ...
- PAT-1145(Hashing - Average Search Time)哈希表+二次探测解决冲突
Hashing - Average Search Time PAT-1145 需要注意本题的table的容量设置 二次探测,只考虑正增量 这里计算平均查找长度的方法和书本中的不同 #include&l ...