通过电机编码器AB相输出确定电机转向
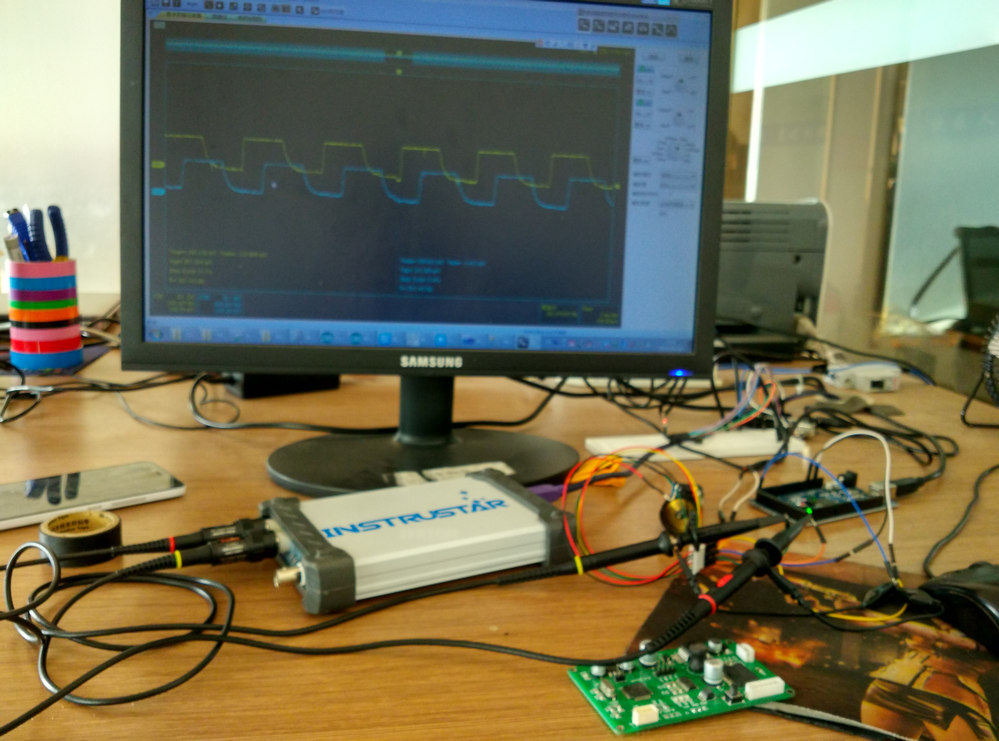
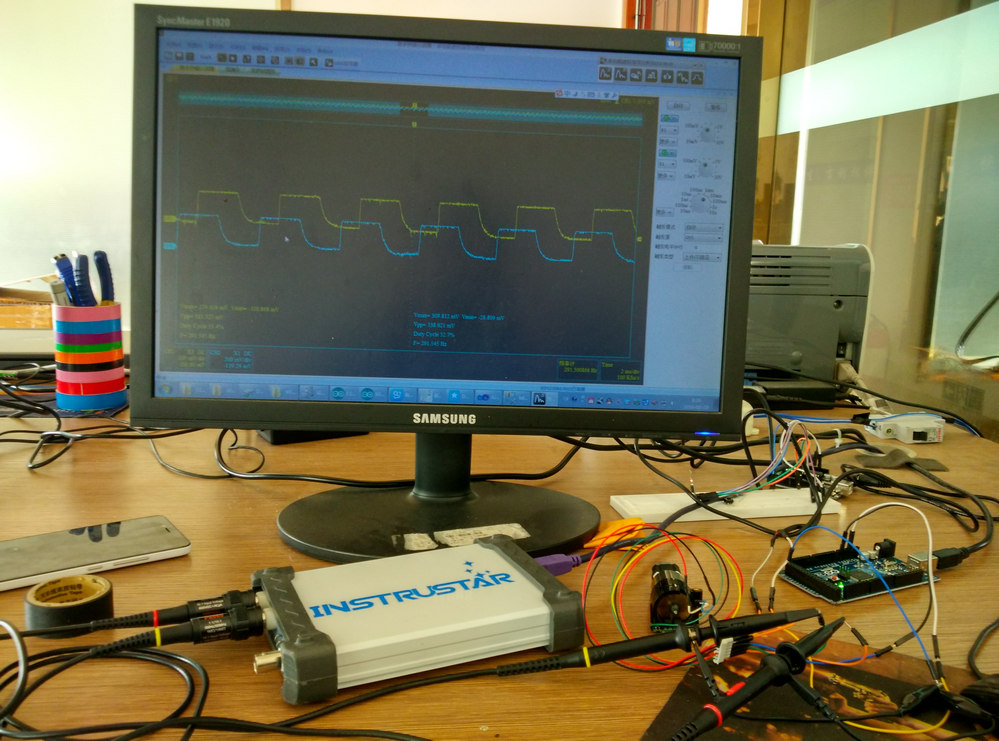
AB相输出相差90度,即当A相"正跳变"时如果B相是高电平那么是"正转",反之是"反转"
图片:
正转
反转
#include <TimerOne.h>
#define D_Left_PIN 7
#define D_Right_PIN 8
#define IN1 22
#define IN2 23
#define IN3 24
#define IN4 25
#define ENA 5
#define ENB 13
#define FIREPIN 9
#define Kp 0.5
#define Ki 0.5
#define Kd 0.0 #define MOTOR_GO_FORWARD {STOP=0; digitalWrite(IN1,LOW);digitalWrite(IN2,HIGH);digitalWrite(IN3,LOW);digitalWrite(IN4,HIGH);}
#define MOTOR_GO_BACK {STOP=0; digitalWrite(IN1,HIGH);digitalWrite(IN2,LOW);digitalWrite(IN3,HIGH);digitalWrite(IN4,LOW);}
#define MOTOR_GO_RIGHT {STOP=0; digitalWrite(IN1,HIGH);digitalWrite(IN2,LOW);digitalWrite(IN3,LOW);digitalWrite(IN4,HIGH);}
#define MOTOR_GO_LEFT {STOP=0; digitalWrite(IN1,LOW);digitalWrite(IN2,HIGH);digitalWrite(IN3,HIGH);digitalWrite(IN4,LOW);}
#define MOTOR_GO_STOP {STOP=1; digitalWrite(IN1,LOW);digitalWrite(IN2,LOW);digitalWrite(IN3,LOW);digitalWrite(IN4,LOW);} int Left_Speed[]={,,,,,,,,,};//左侧速度档位
int Right_Speed[]={,,,,,,,,,};//右侧速度档位 int Left_Speed_Hold=;//定义左侧速度变量
int Right_Speed_Hold=;//定义右侧速度变量 byte Fireing=;
long FireStopTime=;
unsigned long lastSendTime=;
unsigned long lastReceiveTime=;
byte RecCache[];
volatile int CacheIndex=; byte STOP=;
//=============================PID Args===========================
float left_LastError=0.0; // Error[-1]
float left_SumError=0.0; // Sums of Errors float right_LastError=0.0; // Error[-1]
float right_SumError=0.0; // Sums of Errors int flag=; //定义定时器中断标志,用于判断是否发生中断 long counter_val_right[] = {,}; //定义数组,用于存放外部中断计数值
byte CurCnt_right = ; //定义当前计数器标志,用于判断当前正在计数的数组
byte Direction_right=;
int rightSpeed=;
float rightPWM=0.0; long counter_val_left[] = {,}; //定义数组,用于存放外部中断计数值
byte CurCnt_left = ; //定义当前计数器标志,用于判断当前正在计数的数组
byte Direction_left=;
int leftSpeed = ;
float leftPWM=0.0;
unsigned long lastPrintTime=;
//========================End PID========================= void setup() { Serial.begin();//初始化波特率为115200
initWifi();
initIO();
setCache(,); attachInterrupt(,counter_left,RISING);
attachInterrupt(,counter_right, RISING);//设置中断方式为上升沿 Timer1.initialize();// 设置定时器中断时间,单位微秒,此处为1秒
Timer1.attachInterrupt( timerIsr ); // 打开定时器中断
interrupts(); //打开外部中断
}
void initIO(){
pinMode(D_Left_PIN,INPUT);
pinMode(D_Right_PIN,INPUT);
pinMode(IN1,OUTPUT);
pinMode(IN2,OUTPUT);
pinMode(IN3,OUTPUT);
pinMode(IN4,OUTPUT);
pinMode(ENA,OUTPUT);
pinMode(ENB,OUTPUT);
pinMode(FIREPIN,OUTPUT);
digitalWrite(IN1,LOW);
digitalWrite(IN2,LOW);
digitalWrite(IN3,LOW);
digitalWrite(IN4,LOW); digitalWrite(FIREPIN,LOW); }
void loop()
{
handleTXR();
checkStopFire();
speedControl(); } void setSpeed(){ float leftP=0.0,rightP=0.0,leftD=0.0,rightD=0.0; // 比例常数 Proportional Const
leftP=(Left_Speed[Left_Speed_Hold]- leftSpeed);
rightP=(Right_Speed[Right_Speed_Hold] - rightSpeed); //积分常数 Integral Const
left_SumError +=leftP;
right_SumError+=rightP; //微分常数 Derivative Const
// leftD=leftP-left_LastError;
// rightD=rightP-right_LastError;
// left_LastError=leftD;
// right_LastError=rightD;
// leftPWM=(leftP * Kp) + (left_SumError * Ki) +(leftD * Kd);
// rightPWM=((rightP) * Kp) + (right_SumError * Ki) +(rightD * Kd) ; leftPWM=(leftP * Kp) + (left_SumError * Ki) ;
rightPWM=((rightP) * Kp) + (right_SumError * Ki) ; if(leftPWM>)leftPWM=;
if(leftPWM<)leftPWM=; if(rightPWM>)rightPWM=;
if(rightPWM<)rightPWM=; analogWrite(ENA,rightPWM);
analogWrite(ENB,leftPWM);
} void speedControl(){ if(flag==) //判断是否发生定时器中断,即定时时间是否到达
{
flag=; //清除定时器中断标志位
if((CurCnt_left&0x01) == ) //当前使用的是偶数计数器,则上次频率值存放在第二个元素中
{
leftSpeed =counter_val_left[]; //读取数组第二个元素中的数值
counter_val_left[]=; //读完清除原来的数值,以便下次使用
}
else //当前使用的是奇数计数器,则上次频率值存放在第一个元素中
{
leftSpeed =counter_val_left[]; //读取数组第二个元素中的数值
counter_val_left[]=; //读完清除原来的数值,以便下次使用
} if((CurCnt_right&0x01) == ) //当前使用的是偶数计数器,则上次频率值存放在第二个元素中
{
rightSpeed =counter_val_right[]; //读取数组第二个元素中的数值
counter_val_right[]=; //读完清除原来的数值,以便下次使用
}
else //当前使用的是奇数计数器,则上次频率值存放在第一个元素中
{
rightSpeed =counter_val_right[]; //读取数组第二个元素中的数值
counter_val_right[]=; //读完清除原来的数值,以便下次使用
} if(!STOP) setSpeed(); if((millis()-lastPrintTime)>){
Serial.print("L:"); //发送帧头大写S
Serial.print( leftSpeed); //发送频率数据,并回车换行
Serial.print(",");
Serial.print(Direction_left);
Serial.print(",R:");
Serial.print(rightSpeed);
Serial.print(",");
Serial.print(Direction_right);
Serial.println("");
Serial.println(leftPWM);
Serial.println(rightPWM);
lastPrintTime=millis();
}
}
}
//外部中断处理函数 void counter_left(){
counter_val_left[CurCnt_left & 0x01] +=;
Direction_left=digitalRead(D_Left_PIN);
} void counter_right()
{
//通过当前计数器来实现对外部中断计数值存储的切换
counter_val_right[CurCnt_right& 0x01] += ; //发生一次中断则加1
Direction_right=digitalRead(D_Right_PIN);
} //定时器中断处理函数
void timerIsr()
{
flag=; //置位定时器中断标志位
CurCnt_right++; //当前计数器的值加1,实现另一个计数值切换
CurCnt_left++;
} //===================End PID ===============
void initWifi(){
Serial2.begin(); delayAndRead();
Serial2.println("AT+CIOBAUD=38400");
delayAndRead();
Serial2.println("AT+RST");
delayAndRead();
Serial2.begin();
Serial2.println("AT+CIPMUX=1");
delayAndRead();
Serial2.println("AT+CIPSERVER=1");
delayAndRead();
Serial2.println("AT+CIPSTO=60");
delayAndRead(); } void fire(long fireDelay){
if(Fireing==)return;
digitalWrite(FIREPIN,HIGH);
Fireing=;
FireStopTime=millis() + fireDelay;
Serial.println(FIREPIN);
Serial.println("fireDelay" + (String)fireDelay);
Serial.println(FireStopTime);
}
void checkStopFire(){
//check stop fire
if(Fireing== && (FireStopTime <=millis())){
Fireing=;
digitalWrite(FIREPIN,LOW);
}
} void reply(bool isOk,String cmd,String msg){
String rStr="";
if(isOk){
rStr="$FOK-" + cmd +":" +msg +"$E";
Serial2.println("AT+CIPSEND=0," + (String)rStr.length());
delay();
Serial2.println(rStr);
}else{
rStr="$FEE-" + cmd +":" +msg +"$E";
Serial2.println("AT+CIPSEND=0," + (String)rStr.length());
delay();
Serial2.println(rStr); } } void replyBytes(bool isOk,String cmd,byte msg[],int msgLen){
String rStr="";
int sendLen=;
if(isOk){
rStr="$FOK-" + cmd +":" ;
sendLen= rStr.length() + msgLen +; //2 is "$E"
Serial2.println("AT+CIPSEND=0," + (String)sendLen);
delay();
Serial2.print(rStr);
for(int i=;i<msgLen;i++){
Serial2.write(msg[i]);
}
Serial2.println("$E");
}else{
rStr="$FEE-" + cmd +":" ;
sendLen= rStr.length() + msgLen +; //2 is "$E"
Serial2.println("AT+CIPSEND=0," + (String)sendLen);
delay();
Serial2.print(rStr);
for(int i=;i<msgLen;i++){
Serial2.write(msg[i]);
}
Serial2.println("$E");
} } void cls(){
while(Serial2.available()){
Serial2.read();
}
} void delayAndRead(int waitTime){
delay(waitTime);
while(Serial2.available()){
Serial.write(Serial2.read());
}
} void handleTXR(){ while(Serial2.available()){
byte c=(byte) Serial2.read();
RecCache[CacheIndex++]=c; }
if(CacheIndex>){
CacheIndex=;
setCache(,);
Serial.println("Cut");
} int bIndex=bIndexOf("$F",);
if(bIndex>=){
int eIndex=bIndexOf("$E",bIndex);
if(eIndex>bIndex){
//Extra Data
int dataLen= eIndex - (bIndex +);
byte data[dataLen];
for(int i=;i<dataLen;i++){
data[i]= RecCache[bIndex+ +i] ; } for(int w=(eIndex +);w<CacheIndex && w<;w++){
RecCache[w-(eIndex + )]=RecCache[w];
}
CacheIndex = CacheIndex - (eIndex +);
setCache(CacheIndex,); lastReceiveTime=millis();
handleCmd(data,dataLen); }
} if(CacheIndex>){
CacheIndex=;
setCache(,);
} } void setCache(int start,int endIndex){
for(int i=start;i<endIndex;i++){
RecCache[i]=;
}
}
boolean bStartsWith(byte data[],int len, String fStr){
int fLen=fStr.length() ;
byte fBytes[fLen + ];
fStr.getBytes(fBytes,fLen+); if(len<=)return false;
if(len<fLen)return false;
byte flag=;
for(int j=;j<fLen;j++){
if(fBytes[j]!=data[j])
{
flag=;
break;
} }
if(flag) return true; return false;
} int bIndexOf(String fStr,int start){
int fLen=fStr.length() ;
byte fBytes[fLen + ];
fStr.getBytes(fBytes,fLen+); for(int i=start;i<(CacheIndex + -fLen);i++){ if(RecCache[i]==fBytes[])
{
byte flag=;
for(int j=;j<fLen;j++){
if(fBytes[j]!=RecCache[i+j])
{
flag=;
break;
}
}
if(flag)return i;
}
}
return -;
} void handleCmd(byte data[], int len){ if(bStartsWith(data,len,"HB:")){
hbCmd();
}else if(bStartsWith(data,len,"F:")){
fireCmd(data,len);
}else if(bStartsWith(data,len,"C:")){
controlCmd(data,len);
}
} void hbCmd(){
byte bs[];
unsigned long mlis=millis();
long2byte(mlis,bs);
Serial.println(mlis);
replyBytes(true,"HB",bs,);
} void fireCmd(byte data[], int len){ byte duration=data[];
if(duration>) duration=;
if(duration<=)duration=; long longDuration= duration * ;
fire(longDuration);
reply(true,"F","");
} void controlCmd(byte data[], int len){
byte bs[]={,};
bs[]=data[];bs[]=data[];
byte isMatch=; if(data[]==0x01 && data[]==0x01){
//Forward
isMatch=;
MOTOR_GO_FORWARD;
}else if(data[]==0x01 && data[]==0x02){
//Back
isMatch=;
MOTOR_GO_BACK;
}else if(data[]==0x01 && data[]==0x03){
//Turn Left
isMatch=;
MOTOR_GO_LEFT;
}else if(data[]==0x01 && data[]==0x04){
//Turn Right
isMatch=;
MOTOR_GO_RIGHT;
}else if(data[]==0x01 && data[]==0x05){
//Stop
isMatch=;
MOTOR_GO_STOP;
Serial.println("Stop");
}else if(data[]==0x02 && data[]==0x01){
//Left Speed
isMatch=;
byte ena=data[];
if(ena>= && ena<=){
Left_Speed_Hold=ena;
} }else if(data[]==0x02 && data[]==0x02){
//Right Speed
isMatch=;
byte enb=data[];
if(enb>= && enb<=){
Right_Speed_Hold=enb;
} }
if(isMatch==)replyBytes(true,"C",bs,); } void long2byte(unsigned long res,byte targets[] ) {
targets[] = (byte) (res & 0xff);// 鏈�浣庝綅
targets[] = (byte) ((res >> ) & 0xff);// 娆′綆浣�
targets[] = (byte) ((res >> ) & 0xff);// 娆¢珮浣�
targets[] = (byte) (res >> );// 鏈�楂樹綅,鏃犵鍙峰彸绉汇�� } unsigned long bytes2long(byte buf[]) {
unsigned long firstByte = ;
unsigned long secondByte = ;
unsigned long thirdByte = ;
unsigned long fourthByte = ;
int index = ;
firstByte = (0x000000FFU & ( buf[index+]));
secondByte = (0x000000FFU & ( buf[index + ]));
thirdByte = (0x000000FFU & ( buf[index + ]));
fourthByte = (0x000000FFU & ( buf[index ]));
index = index + ;
return ((unsigned long) (firstByte << | secondByte << | thirdByte << | fourthByte)) & 0xFFFFFFFFUL;
}
通过电机编码器AB相输出确定电机转向的更多相关文章
- 电机AB相编码器测速
控制任务 检测编码器的脉冲并测速 电路设计 图1 直流电机带减速器和编码器 图2 编码器接线定义 编码器接线定义如下 M1:电机电源接口,绿色的 GND:编码器电源负极输入口,橙色的 C1:编码器A ...
- STM32—TIMx实现编码器四倍频
文章目录 一.储备知识 二.TIMx的编码器模式介绍 1.计数边沿设置 2.选择极性和使能 3.使能 4.计数方向 三.代码部分 一.储备知识 通过STM32的定时器编码器接口模式对编码器进行四倍频, ...
- 玩转X-CTR100 l STM32F4 l 电机正交编码器
我造轮子,你造车,创客一起造起来!塔克创新资讯[塔克社区 www.xtark.cn ][塔克博客 www.cnblogs.com/xtark/ ] 本文介绍X-CTR100控制器的电机正交编码器,X- ...
- 实现硬件PWM控制电机旋转和通过编码器计算所转圈数的简单例程
该例程所用的硬件设备: 直流电机驱动模块YYH-LWZ: H桥 大功率 正反转 刹车 PWM 调速 5/12/24V 12V直流减速电机JGB37-520B:ASLONG JGB37-520B编码器减 ...
- 伺服驱动器UVW电机电源线相序错误
我们有必要先了解此讨论的前提:编码器初始安装相位正确.伺服驱动器将全然"採信"电机编码器的初始安装相位所表征的电机电角度相位,无需在伺服电机 的UVW动力线接线连接后进行额外 ...
- 【一】工程配置与电机控制part1
前言 学校发的无刷电机: 我们准备的有刷电机: 带霍尔编码器! 电机参数: 名称:驰名电机(直流减速电机) 型号:JGA25-370 电压:12V 转数:1360r/min 做云台,核心是使用PID控 ...
- YASKAWA电机控制(1)---接线
实验室所购置电机型号为YASKAWA-AC SERVO MOTOR SGM7J-01AFC6S型,配SGD7S-R90A00A002伺服控制器.电机和控制器的操作说明书由安川中文官网安川电机资料提供. ...
- stm32电机控制之控制两路直流电机
小车使用的电机是12v供电的直流电机,带编码器反馈,这样就可以采用闭环速度控制,这里电机使用PWM驱动,速度控制框图如下: 由以上框图可知,STM32通过定时器模块输出PWM波来控制两个直流电机的转动 ...
- stm32电机控制之控制两路直流电机!看完你会了吗
手头上有一个差分驱动的小车,使用两个直流电机驱动,要实现小车的在给定速度下运动,完成直线行驶,转向,加速,刹车等复杂运动. 使用的电机是12v供电的直流电机,带编码器反馈,这样就可以采用闭环速度控制, ...
随机推荐
- selector 模块
selector 模块进行自动匹配,当是windows系统时,自动匹配select, linux系统时,自动匹配epoll,传输时会明确告诉内核响应服务器的地址,速度要更快 import select ...
- Spring boot @ConfigurationProperties 和@Value
@ConfigurationProperties @Value 功能 批量注入配置文件中的属性 一个个指定 松散绑定(松散语法) 支持 不支持 SpEL 不支持 支持 JSR303数据校验 支持 ...
- as3 文档类引用
/**文档类引用**/ public static var main:CoverMain; public function CoverMain() { main=this; }
- remote Request
import java.io.IOException; import java.io.InputStream; import java.io.UnsupportedEncodingException; ...
- cmake编译参数
进入源码目录后 cmake . -LH --查看之前编译参数 ccmake . 使用cmake gui界面进行查看和编辑编译用到的参数 (推荐) 源码目录下 INSTALL-SOURCE 文件后面 ...
- Spring MVC国际化
本文基于Spring MVC 注解-让Spring跑起来.本文提到的国际化是Spring实现国际化的方案之一. (1) 在applicationContext.xml中添加以下配置信息: <!- ...
- HTML meta 文本 格式排版 链接图表 列表 表单 frame后台布局实例
meta标签 content属性必须和http-equiv或者name属性一起使用 http-equiv属性,就是http当量,用于和服务器发送数据前的提交交互使用.(另层含义这个当量在浏览器和服务器 ...
- Android Studio 连接天天、海马、逍遥模拟器
adb connect 127.0.0.1:6555 取消连接 adb disconnect 127.0.0.1:6555 连接海马模拟器(未测试) adb connect 127.0.0.1:26 ...
- JVM7、8详解及优化
一.引言:永久代为什么被移出HotSpot JVM了? 详见:JEP 122: Remove the Permanent Generation 原因主要有两个: 1.由于Permanent Gener ...
- 关于访问asp.net网站时登录后的奇怪问题
登录后,地址栏地址变成了 http://www.XXXX.com/(F(HDc3otfFs0wkZu4P4CjZ50Qkck2q8aekR3g6F0m_NRZRo7kt7XQ6CjAFBR4PR8kZ ...