imu标定 imu_tk
1. 首先标定加速度计,这是imu加速度计xyz三个轴在标定过程中的读数:
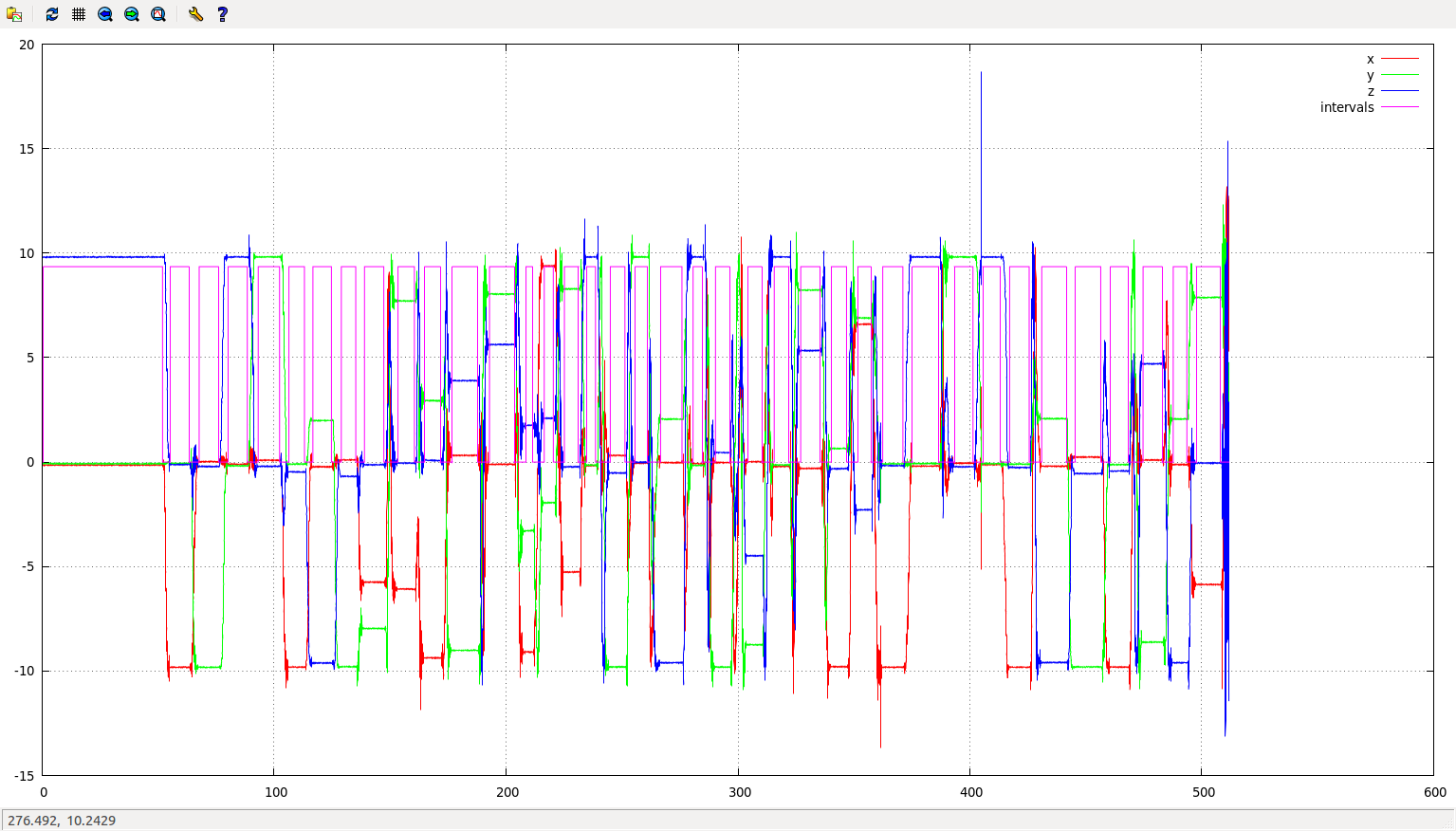
标定结果:

2. 利用加速度计的标定结果,标定陀螺仪,结果:

也可以使用港科大开源的一个工具:
https://github.com/gaowenliang/imu_utils
imu标定 imu_tk的更多相关文章
- IMU 标定 | 工业界和学术界有什么不同?
点击"计算机视觉life"关注,置顶更快接收消息! 由于格式问题最好在公众号上观看<IMU 标定-工业界和学术界有什么不同?> 本文主要介绍了IMU基本结构原理和误差的 ...
- Kalibr installation tutorial
How to install Kalibr I was confused about installing Kalibr, but there is no even one hint in READM ...
- 相机标定:kalibr标定工具箱使用总结
1 多相机标定 1.1采集图像和IMU 1.2制作Bag包 1)组织文件结构 ~/kalibr_workspace/test/stereo_calib bagsrc cam0 (1+time(0))* ...
- 【项目实战】自备相机+IMU跑通Vins-Mono记录
前言 初次接触SLAM,公司要求用自己的设备来跑通vinsmono这个程序,虽然已经跑通了别人的数据包,但是真正自己上手来运行这个程序,发现真的是困难重重,特意在此记载下来整个过程,以供大家参考. 我 ...
- SLAM细碎内容积累_来自各种技术交流群_持续更新
imu标定 工具包:imu_utils, imu_tk, kalibr 用kalibr做标定,相机和imu的采样频率要求:相机20,imu100.kalibr也可以做鱼眼相机+imu的联合标定 ...
- 如何从零开始系统化学习视觉SLAM?
由于显示格式问题,建议阅读原文:如何从零开始系统化学习视觉SLAM? 什么是SLAM? SLAM是 Simultaneous Localization And Mapping的 英文首字母组合,一般翻 ...
- kalibr论文阅读笔记
单目相机IMU标定 该论文将相机IMU标定分为两个大方面: 一. 使用基函数来估计时间偏差 二. 相机和IMU的空间位置转换 校准变量:重力.外参旋转和平移.时钟偏移.IMU位姿.加速度计偏置.陀螺仪 ...
- Imu_tk算法流程及数据采集要求和标定程序参数设置
Imu_tk算法流程 由于VIO中,普遍使用的是精度较低的imu,所以其需要一个较为准确的内参数和noise的估计.Noise大家通常使用Allan方差进行估计可以得到较为可信的结果,这里不赘述了.内 ...
- VINS(四)初始化与相机IMU外参标定
和单目纯视觉的初始化只需要获取R,t和feature的深度不同,VIO的初始化话通常需要标定出所有的关键参数,包括速度,重力方向,feature深度,以及相机IMU外参$R_{c}^{b}$和$p_{ ...
随机推荐
- asp.net 對象圖解
- oracle 复制表结构 复制表数据 sql 语句
1. 复制表结构及其数据: create table table_name_new as select * from table_name_old 2. 只复制表结构: create table ta ...
- LintCode,hihoCoder,LeetCode有什么区别?
https://www.zhihu.com/question/31218682 知乎用户 9 人赞同了该回答 LintCode 和LeetCode的题差不太多LintCode 有中文,不过没有用户讨论 ...
- Linux系统优化实现高并发
ulimit -SHn 65535内核优化net.ipv4.ip_forward = 1 #开启路由功能net.ipv4.conf.default.rp_filter = 1 ...
- 最大公约数(GCD)与最小公倍数(LCM)的计算
给出两个数a.b,求最大公约数(GCD)与最小公倍数(LCM) 一.最大公约数(GCD) 最大公约数的递归: * 1.若a可以整除b,则最大公约数是b * 2.如果1不成立,最大公约数便是b ...
- September 26th 2017 Week 39th Tuesday
I have to protect the one thing I can't live without. 我必须为我一生挚爱遮风挡雨. A man is a success if he gets u ...
- Hibernate事务、缓存和连接池
一.事务 1.数据库事务的概念 数据库事务是指由一个或多个SQL语句组成的工作单元,这个工作单元中的SQL语句相互依赖,如果有一个SQL语句执行失败,就必须撤销整个工作单元.在并发环境中,多个事务同时 ...
- vim高级操作命令
1.首先在命令模式下,输入“:set nu”显示行号:通过行号确定你要删除的行:命令输入“:32,65d”,回车键,32-65行就被删除了,很快捷吧如果无意中删除错了,可以使用‘u’键恢复(命令模式下 ...
- VMware三个版本号workstation、server、esxi的差别
VMware三个版本号 workstation: 单机级.用在个人桌面系统中.须要操作系统支持 servier:工作组级,用于服务器.须要操作系统支持 esxi:企业级,用于服务器,不须要操作系统支持 ...
- java web开发环境配置系列(二)安装tomcat
在今天,读书有时是件“麻烦”事.它需要你付出时间,付出精力,还要付出一份心境.--仅以<java web开发环境配置系列>来祭奠那逝去的…… 1.下载tomcat压缩包,进入官网http: ...