Linux的LCD驱动分析及移植
测试平台
宿主机平台:Ubuntu 12.04.4 LTS
目标机:Easy-ARM IMX283
目标机内核:Linux 2.6.35.3
LCD驱动分析
LCD屏的驱动总体上分成两块,一块是GUI显示输出驱动;一块是触摸驱动(该部分单独一节另外描述)。
LCD驱动概念
LCD是Liquid Crystal Display的简称,也就是经常所说的液晶显示器。LCD能够支持彩色图像的显示和视频的播放,是一种非常重要的输出设备。如果我们的系统要用GUI(图形界面接口),比如minigui,MicroWindows。这时LCD设备驱动程序就应该编写成frambuffer接口,而不是编写成仅仅操作底层的LCD控制器接口。
framebuffer是Linux系统为显示设备提供的一个接口,它将显示缓冲区抽象,屏蔽图像硬件的底层差异,允许上层应用程序在图形模式下直接对显示缓冲区进行操作。framebuffer又叫帧缓冲,是Linux为操作显示设备提供的一个用户接口。用户应用程序可以通过framebuffer透明地访问不同类型的显示设备。从这个方面来说,framebuffer是硬件设备显示缓冲区的抽象。Linux抽象出framebuffer这个帧缓冲区可以供用户应用程序直接读写,通过更改framebuffer中的内容,就可以立刻显示在LCD显示屏上。
framebuffer是一个标准的字符设备,主设备号是29,次设备号根据缓冲区的数目而定。framebuffer对应/dev/fb%d设备文件。根据显卡的多少,设备文件可能是/dev/fb0、/dev/fb1等。缓冲区设备也是一种普通的内存设备,可以直接对其进行读写。对用户程序而言,它和/dev下面的其他设备没有什么区别,用户可以把frameBuffer看成一块内存,既可以写,又可以读。显示器将根据内存数据显示对应的图像界面。这一切都由LCD控制器和响应的驱动程序来完成。
LCD驱动框架分析
总体上是一个平台设备驱动与字符驱动的组合;
先从LCD的设备 dev/fb* 是怎么实现的来进行追溯;
1.开发板启动,进行设备注册;
在 arch/arm/mach-mx28/device.c 设备注册文件中,注册LCD的fd平台设备 “mxs-fb”
// mxs-fb平台设备资源定义
static struct resource framebuffer_resource[] = {
{
.flags = IORESOURCE_MEM,
.start = LCDIF_PHYS_ADDR,
.end = LCDIF_PHYS_ADDR + 0x2000 - 1,
},
{
.flags = IORESOURCE_IRQ,
.start = IRQ_LCDIF,
.end = IRQ_LCDIF,
},
};
// mxs-fb平台设备私有数据,包含显示屏名称、分辨率、位宽、时钟、面板操作等,在drivers/video/mxs/lcd_43wvf1g.c 中通过subsys_initcall 接口将设备私有数据添加到链表中
static struct mxs_platform_fb_data mxs_framebuffer_pdata = {
.list = LIST_HEAD_INIT(mxs_framebuffer_pdata.list),
};
// lcd设备启动初始化,在 m28evk.c 中 mx28_device_init()会调用
static void __init mx28_init_lcdif(void)
{
struct platform_device *pdev;
pdev = mxs_get_device("mxs-fb", 0); //获取匹配的设备结构体,定义在 arch/arm/plat-mxs/device.c 中
if (pdev == NULL || IS_ERR(pdev))
return;
pdev->resource = framebuffer_resource;
pdev->num_resources = ARRAY_SIZE(framebuffer_resource);
pdev->dev.platform_data = &mxs_framebuffer_pdata;
mxs_add_device(pdev, 3); // 添加到设备注册列表,设备注册在 arch/arm/plat-mxs/device.c 中实现 通过 device_initcall(mxs_device_init);遍历设备列表并进行平台设备注册
}
2.接下来是 platform_driver mxsfb_driver 的注册,匹配之后触发 mxsfb_probe 函数执行以下操作:
进行相关硬件初始化和 framebuffer 设置;
平台设备驱动 platform_driver 注册 drivers/video/mxs/mxsfb.c
会编译成 mxsfb.ko
static struct platform_driver mxsfb_driver = {
.probe = mxsfb_probe,
.remove = mxsfb_remove,
.suspend = mxsfb_suspend,
.resume = mxsfb_resume,
.driver = {
.name = "mxs-fb", // 与启动时的平台设备注册的 platform_device 名称相同
.owner = THIS_MODULE,
},
};
static int __init mxsfb_init(void)
{
return platform_driver_register(&mxsfb_driver); // 显示屏平台设备驱动注册
}
驱动安装时与平台设备匹配之后触发 mxsfb_probe 函数,这个时核心。
static int __devinit mxsfb_probe(struct platform_device *pdev)
{
int ret = 0;
struct mxs_fb_data *data;
struct resource *res;
struct fb_info *info;
struct mxs_platform_fb_data *pdata = pdev->dev.platform_data;
struct mxs_platform_fb_entry *pentry = NULL; mydbg("\n");
if (pdata == NULL) {
ret = -ENODEV;
goto out;
} if (default_panel_name) {
mydbg("default_panel_name=%s\n",default_panel_name);
// 通过LCD面板名称匹配获取面板参数及设置句柄(平台设备私有数据传递过来)
pentry = (void *)mxs_lcd_iterate_pdata(pdata,
get_matching_pentry_by_name,
default_panel_name);
if (pentry) {
mxs_lcd_move_pentry_up(pentry, pdata);
pdata->cur = pentry;
}
}
if (!default_panel_name || !pentry) {
mydbg("\n");
pentry = pdata->cur;
}
if (!pentry || !pentry->init_panel || !pentry->run_panel ||
!pentry->release_panel) {
mydbg("\n");
ret = -EINVAL;
goto out;
} data =
(struct mxs_fb_data *)framebuffer_alloc(sizeof(struct mxs_fb_data) +
sizeof(u32) * 256 -
sizeof(struct fb_info),
&pdev->dev);
if (data == NULL) {
ret = -ENOMEM;
goto out;
} cdata = data;
data->dev = &pdev->dev;
data->pdata = pdata;
platform_set_drvdata(pdev, data);
info = &data->info; dev_dbg(&pdev->dev, "resolution %dx%d, bpp %d\n", pentry->x_res,
pentry->y_res, pentry->bpp); mxs_lcd_iterate_pdata(pdata, get_max_memsize, data); data->map_size = PAGE_ALIGN(data->mem_size) * NUM_SCREENS;
dev_dbg(&pdev->dev, "memory to allocate: %d\n", data->map_size); data->virt_start = dma_alloc_writecombine(&pdev->dev,
data->map_size,
&data->phys_start,
GFP_KERNEL); if (data->virt_start == NULL) {
ret = -ENOMEM;
goto out_dma;
}
dev_dbg(&pdev->dev, "allocated at %p:0x%x\n", data->virt_start,
data->phys_start);
mutex_init(&data->blank_mutex);
INIT_WORK(&data->work, mxsfb_task);
data->state = F_ENABLE; mxsfb_default.bits_per_pixel = pentry->bpp;
/* NB: rotated */
mxsfb_default.xres = pentry->y_res;
mxsfb_default.yres = pentry->x_res;
mxsfb_default.xres_virtual = pentry->y_res;
mxsfb_default.yres_virtual = data->map_size /
(pentry->y_res * pentry->bpp / 8);
if (mxsfb_default.yres_virtual >= mxsfb_default.yres * 2)
mxsfb_default.yres_virtual = mxsfb_default.yres * 2;
else
mxsfb_default.yres_virtual = mxsfb_default.yres; mxsfb_fix.smem_start = data->phys_start;
mxsfb_fix.smem_len = pentry->y_res * pentry->x_res * pentry->bpp / 8;
mxsfb_fix.ypanstep = 1; switch (pentry->bpp) {
case 32:
case 24:
mxsfb_default.red.offset = 16;
mxsfb_default.red.length = 8;
mxsfb_default.green.offset = 8;
mxsfb_default.green.length = 8;
mxsfb_default.blue.offset = 0;
mxsfb_default.blue.length = 8;
break; case 16:
#if 0
mxsfb_default.red.offset = 11;
mxsfb_default.red.length = 5;
mxsfb_default.green.offset = 5;
mxsfb_default.green.length = 6;
mxsfb_default.blue.offset = 0;
mxsfb_default.blue.length = 5;
break;
#else
mxsfb_default.red.offset = 0 ;
mxsfb_default.red.length = 5;
mxsfb_default.green.offset = 5;
mxsfb_default.green.length = 6;
mxsfb_default.blue.offset = 11;
mxsfb_default.blue.length = 5;
break;
#endif
default:
dev_err(&pdev->dev, "unsupported bitwidth %d\n", pentry->bpp);
ret = -EINVAL;
goto out_dma;
} info->screen_base = data->virt_start;
info->fbops = &mxsfb_ops;
info->var = mxsfb_default;
info->fix = mxsfb_fix;
info->pseudo_palette = &data->par;
data->par = NULL;
info->flags = FBINFO_FLAG_DEFAULT; init_waitqueue_head(&data->vsync_wait_q);
data->vsync_count = 0; res = platform_get_resource(pdev, IORESOURCE_MEM, 0);
if (res == NULL) {
dev_err(&pdev->dev, "cannot get IRQ resource\n");
ret = -ENODEV;
goto out_dma;
}
data->regbase = (unsigned long)IO_ADDRESS(res->start); res = platform_get_resource(pdev, IORESOURCE_IRQ, 0);
if (res == NULL) {
dev_err(&pdev->dev, "cannot get IRQ resource\n");
ret = -ENODEV;
goto out_dma;
}
data->irq = res->start; mxsfb_check_var(&info->var, info); ret = fb_alloc_cmap(&info->cmap, 256, 0);
if (ret)
goto out_cmap; mxsfb_set_par(info); mxs_init_lcdif();
ret = pentry->init_panel(data->dev, data->phys_start,
mxsfb_fix.smem_len, pentry);
if (ret) {
dev_err(&pdev->dev, "cannot initialize LCD panel\n");
goto out_panel;
}
dev_dbg(&pdev->dev, "LCD panel initialized\n");
init_timings(data); // not effect dotclk mode ret = request_irq(data->irq, lcd_irq_handler, 0, "fb_irq", data);
if (ret) {
dev_err(&pdev->dev, "request_irq (%d) failed with error %d\n",
data->irq, ret);
goto out_panel;
}
ret = register_framebuffer(info); // 注册fb_info
if (ret)
goto out_irq; pentry->run_panel();
/* REVISIT: temporary workaround for MX23EVK */
mxsfb_disable_controller(data);
mxsfb_enable_controller(data);
data->cur_phys = data->phys_start;
dev_dbg(&pdev->dev, "LCD running now\n"); #ifdef CONFIG_CPU_FREQ
mxsfb_nb.fb_data = data;
cpufreq_register_notifier(&mxsfb_nb.nb, CPUFREQ_TRANSITION_NOTIFIER);
#endif /* CONFIG_CPU_FREQ */ goto out; out_irq:
free_irq(data->irq, data);
out_panel:
fb_dealloc_cmap(&info->cmap);
out_cmap:
dma_free_writecombine(&pdev->dev, data->map_size, data->virt_start,
data->phys_start);
out_dma:
kfree(data);
out:
return ret;
}
待续.....
LCD驱动移植总结
1.LCD引脚配置及初始化
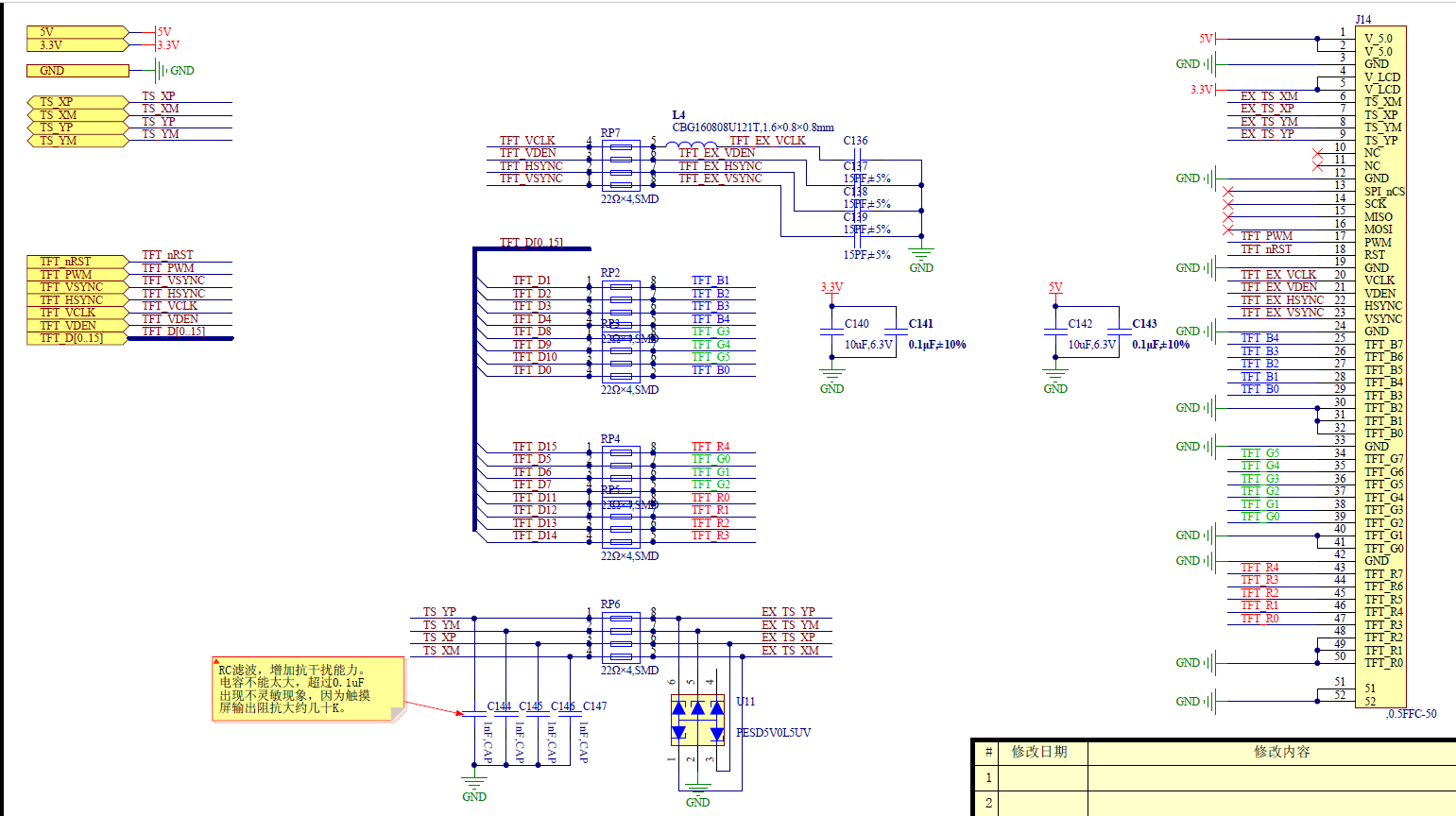
上述原理图包含了数据、时钟、背光控制、触摸、复位等引脚的分配,具体有机会在深入理解LCD硬件驱动原理有在进行说明。
在 arch/arm/mach-mx28/mx28evk_pins.c 的 mx28evk_fixed_pins[ ] 引脚列表中添加 LCD 的驱动引脚,相关引脚转义在 mx28_pins.h 结合 arch/arm/mach/pinctrl.h 实现
#if defined(CONFIG_FB_MXS) || defined(CONFIG_FB_MXS_MODULE)
{
.name = "LCD_D00",
.id = PINID_LCD_D00,
.fun = PIN_FUN1,
.strength = PAD_8MA,
.voltage = PAD_3_3V,
.drive = 1,
},
{
.name = "LCD_D01",
.id = PINID_LCD_D01,
.fun = PIN_FUN1,
.strength = PAD_8MA,
.voltage = PAD_3_3V,
.drive = 1,
},
{
.name = "LCD_D02",
.id = PINID_LCD_D02,
.fun = PIN_FUN1,
.strength = PAD_8MA,
.voltage = PAD_3_3V,
.drive = 1,
},
{
.name = "LCD_D03",
.id = PINID_LCD_D03,
.fun = PIN_FUN1,
.strength = PAD_8MA,
.voltage = PAD_3_3V,
.drive = 1,
},
{
.name = "LCD_D04",
.id = PINID_LCD_D04,
.fun = PIN_FUN1,
.strength = PAD_8MA,
.voltage = PAD_3_3V,
.drive = 1,
},
{
.name = "LCD_D05",
.id = PINID_LCD_D05,
.fun = PIN_FUN1,
.strength = PAD_8MA,
.voltage = PAD_3_3V,
.drive = 1,
},
{
.name = "LCD_D06",
.id = PINID_LCD_D06,
.fun = PIN_FUN1,
.strength = PAD_8MA,
.voltage = PAD_3_3V,
.drive = 1,
},
{
.name = "LCD_D07",
.id = PINID_LCD_D07,
.fun = PIN_FUN1,
.strength = PAD_8MA,
.voltage = PAD_3_3V,
.drive = 1,
},
{
.name = "LCD_D08",
.id = PINID_LCD_D08,
.fun = PIN_FUN1,
.strength = PAD_8MA,
.voltage = PAD_3_3V,
.drive = 1,
},
{
.name = "LCD_D09",
.id = PINID_LCD_D09,
.fun = PIN_FUN1,
.strength = PAD_8MA,
.voltage = PAD_3_3V,
.drive = 1,
},
{
.name = "LCD_D10",
.id = PINID_LCD_D10,
.fun = PIN_FUN1,
.strength = PAD_8MA,
.voltage = PAD_3_3V,
.drive = 1,
},
{
.name = "LCD_D11",
.id = PINID_LCD_D11,
.fun = PIN_FUN1,
.strength = PAD_8MA,
.voltage = PAD_3_3V,
.drive = 1,
},
{
.name = "LCD_D12",
.id = PINID_LCD_D12,
.fun = PIN_FUN1,
.strength = PAD_8MA,
.voltage = PAD_3_3V,
.drive = 1,
},
{
.name = "LCD_D13",
.id = PINID_LCD_D13,
.fun = PIN_FUN1,
.strength = PAD_8MA,
.voltage = PAD_3_3V,
.drive = 1,
},
{
.name = "LCD_D14",
.id = PINID_LCD_D14,
.fun = PIN_FUN1,
.strength = PAD_8MA,
.voltage = PAD_3_3V,
.drive = 1,
},
{
.name = "LCD_D15",
.id = PINID_LCD_D15,
.fun = PIN_FUN1,
.strength = PAD_8MA,
.voltage = PAD_3_3V,
.drive = 1,
},
/*
{
.name = "LCD_D16",
.id = PINID_LCD_D16,
.fun = PIN_FUN1,
.strength = PAD_8MA,
.voltage = PAD_3_3V,
.drive = 1,
},
{
.name = "LCD_D17",
.id = PINID_LCD_D17,
.fun = PIN_FUN1,
.strength = PAD_8MA,
.voltage = PAD_3_3V,
.drive = 1,
},
{
.name = "LCD_D18",
.id = PINID_LCD_D18,
.fun = PIN_FUN1,
.strength = PAD_8MA,
.voltage = PAD_3_3V,
.drive = 1,
},
{
.name = "LCD_D19",
.id = PINID_LCD_D19,
.fun = PIN_FUN1,
.strength = PAD_8MA,
.voltage = PAD_3_3V,
.drive = 1,
},
{
.name = "LCD_D20",
.id = PINID_LCD_D20,
.fun = PIN_FUN1,
.strength = PAD_8MA,
.voltage = PAD_3_3V,
.drive = 1,
},
{
.name = "LCD_D21",
.id = PINID_LCD_D21,
.fun = PIN_FUN1,
.strength = PAD_8MA,
.voltage = PAD_3_3V,
.drive = 1,
},
{
.name = "LCD_D22",
.id = PINID_LCD_D22,
.fun = PIN_FUN1,
.strength = PAD_8MA,
.voltage = PAD_3_3V,
.drive = 1,
},
{
.name = "LCD_D23",
.id = PINID_LCD_D23,
.fun = PIN_FUN1,
.strength = PAD_8MA,
.voltage = PAD_3_3V,
.drive = 1,
},
*/
{
.name = "LCD_RESET",
.id = PINID_LCD_RESET,
.fun = PIN_FUN1,
.strength = PAD_8MA,
.voltage = PAD_3_3V,
.drive = 1,
},
{
.name = "LCD_VSYNC",
.id = PINID_LCD_RD_E,
.fun = PIN_FUN2,
.strength = PAD_8MA,
.voltage = PAD_3_3V,
.drive = 1,
},
{
.name = "LCD_HSYNC",
.id = PINID_LCD_WR_RWN,
.fun = PIN_FUN2,
.strength = PAD_8MA,
.voltage = PAD_3_3V,
.drive = 1,
},
{
.name = "LCD_ENABLE",
.id = PINID_LCD_CS,
.fun = PIN_FUN2,
.strength = PAD_8MA,
.voltage = PAD_3_3V,
.drive = 1,
},
{
.name = "LCD_DOTCLK",
.id = PINID_LCD_RS,
.fun = PIN_FUN2,
.strength = PAD_8MA,
.voltage = PAD_3_3V,
.drive = 1,
},
{
.name = "LCD_BACKLIGHT",
.id = PINID_PWM3,
.fun = PIN_FUN1,
.strength = PAD_8MA,
.voltage = PAD_3_3V,
.drive = 1,
},
#endif
然后通过类似 LCDIF_PHYS_ADDR + BM_LCDIF_CTRL1_RESET 组合就可以操作相关引脚寄存器了
2. 驱动移植到drivers 目录
1).将LCD驱动放到 drivers/video/ 目录下,本例为 mxs
2).修改 drivers/video/Kconfig,添加如下配置,表示会提取 mxs 驱动的 Kconfig 配置
if ARCH_MXS
source "drivers/video/mxs/Kconfig"
endif
3. 修改板级文件
板级文件有两个
mach-mx28 // mx28系列特有的
plat-mxs // fsl通用共有的功能
1)在设备注册 arch/arm/mach-mx28/device.c 中添加 mxs LCD 平台设备注册
#if defined(CONFIG_FB_MXS) || defined(CONFIG_FB_MXS_MODULE)
// LCD平台设备资源 resource
static struct resource framebuffer_resource[] = {
{
.flags = IORESOURCE_MEM, //寻址地址空间资源
.start = LCDIF_PHYS_ADDR,
.end = LCDIF_PHYS_ADDR + 0x2000 - 1,
},
{
.flags = IORESOURCE_IRQ, //中断资源
.start = IRQ_LCDIF,
.end = IRQ_LCDIF,
},
};
static struct mxs_platform_fb_data mxs_framebuffer_pdata = {
.list = LIST_HEAD_INIT(mxs_framebuffer_pdata.list),
};
static void __init mx28_init_lcdif(void)
{
struct platform_device *pdev;
pdev = mxs_get_device("mxs-fb", 0); //获取匹配的设备结构体,定义在 arch/arm/plat-mxs/device.c 中
if (pdev == NULL || IS_ERR(pdev))
return;
pdev->resource = framebuffer_resource;
pdev->num_resources = ARRAY_SIZE(framebuffer_resource);
pdev->dev.platform_data = &mxs_framebuffer_pdata; //设备私有数据链表,包含名称、分辨率、位宽、时钟、面板操作,在drivers/video/mxs/lcd_43wvf1g.c 中通过subsys_initcall 接口将设备私有数据添加到链表中
mxs_add_device(pdev, 3); //添加到设备注册列表
}
#else
static void __init mx28_init_lcdif(void)
{
;
}
#endif
2)在设备列表注册 arch/arm/plat-mxs/device.c 中添加 mxs LCD 平台设备结构及设备列表匹配信息
#if defined(CONFIG_FB_MXS) || defined(CONFIG_FB_MXS_MODULE)
// LCD面板平台设备结构体
static struct platform_device mxs_fb = {
.name = "mxs-fb", //平台设备名称,后面的平台设备驱动名称要与这个一致
.id = 0,
.dev = {
.dma_mask = &common_dmamask,
.coherent_dma_mask = DMA_BIT_MASK(32),
.release = mxs_nop_release,
},
};
#endif static struct mxs_dev_lookup dev_lookup[] = {
......
#if defined(CONFIG_FB_MXS) || defined(CONFIG_FB_MXS_MODULE)
{
.name = "mxs-fb",
.size = 1,
.pdev = &mxs_fb,
},
#endif
......
}
Linux的LCD驱动分析及移植的更多相关文章
- Linux学习: LCD驱动
一.LCD驱动框架: 1.分配一个fb_info结构体:s3c_lcd = framebuffer_alloc(0,NULL); 2.设置fb_info(s3c_lcd): ID.固定参数.可变参数. ...
- LCD驱动分析【转】
转自:http://blog.csdn.net/hanmengaidudu/article/details/21559153 1.S3C2440上LCD驱动 (FrameBuffer)实例开发讲解 其 ...
- LCD驱动分析(一)字符设备驱动框架分析
参考:S3C2440 LCD驱动(FrameBuffer)实例开发<一> S3C2440 LCD驱动(FrameBuffer)实例开发<二> LCD驱动也是字符设备驱动,也 ...
- linux的串口驱动分析
1.串口驱动中的数据结构 • UART驱动程序结构:struct uart_driver 驱动 • UART端口结构: struct uart_port 串口 • UART相关操作函数结构: st ...
- 高通 android平台LCD驱动分析
目前手机芯片厂家提供的源码里包含整个LCD驱动框架,一般厂家会定义一个xxx_fb.c的源文件,注册一个平台设备和平台驱动,在驱动的probe函数中来调用register_framebuffer(), ...
- LCD驱动分析(二)帧缓冲设备作为平台设备
参考:S3C2440 LCD驱动(FrameBuffer)实例开发<一> S3C2440 LCD驱动(FrameBuffer)实例开发<二> 1.平台设备注册 1.1在li ...
- (linux)MMC 卡驱动分析
最近花时间研究了一下 MMC 卡驱动程序,开始在网上找了很多关于 MMC 卡驱动的分析文章,但大都是在描述各个层,这对于初学者来讲帮助并不大,所以我就打算把自己的理解写下来,希望对大家有用.个人觉得理 ...
- S3C6410 LCD驱动分析(转)
一. 理论分析1. 几个概念:FIMC : Fully Interactive Mobile Camera (完全交互式移动摄像机)FIMD: Fully Interactive Mob ...
- Hi3559AV100外接UVC/MJPEG相机实时采图设计(一):Linux USB摄像头驱动分析
下面将给出Hi3559AV100外接UVC/MJPEG相机实时采图设计的整体流程,主要实现是通过V4L2接口将UVC/MJPEG相机采集的数据送入至MPP平台,经过VDEC.VPSS.VO最后通过HD ...
随机推荐
- 如何给html元素的onclick事件传递参数即如何获取html标签的data
某些非text元素,如a.button等用于触发时间的标签可已将要传的数据放在一个属性中,如data,这个属性必须是不影响样式的,可以使用任意非html定义的名字命名属性,然后将数据传到属性中, &l ...
- YsoSerial 工具常用Payload分析之Common-Collections7(四)
前言 YsoSerial Common-Collection3.2.1 反序列化利用链终于来到最后一个,回顾一下: 以InvokerTranformer为基础通过动态代理触发AnnotationInv ...
- JAVA数组的基础入门>从零开始学java系列
目录 JAVA数组的基础入门 什么是数组,什么情况下使用数组 数组的创建方式 获取数组的数据 数组的内存模型 为什么数组查询修改快,而增删慢? 查询快的原因 增删慢的原因 数组的两种遍历方式以及区别 ...
- 学习mybatis框架>从零开始学JAVA
目录 学习mybatis框架 mybatis框架的介绍 什么是mybatis框架 为什么要使用mybatis框架 mybatis的优点 Mybatis框架环境搭建 去官网下载jar包 创建一个普通的j ...
- 使用vue实现简单的待办事项
待办事项 效果图 目录结构 详细代码 AddNew.vue <template> <div> <input v-model="content"/> ...
- AndroidStudio 插件总结
工作中常用的插件备注如下: Alibaba Java Coding GuidelinesCheckStyle-IDEAAndroid Drawable PreviewGsonFormatTransla ...
- maven将依赖打入jar包中
1.在pom.xml中加入maven-assembly-plugin插件: <build> <plugins> <plugin> <artifactId> ...
- 【Lua篇】静态代码扫描分析(二)词法分析
一.词法分析 词法分析(英语:lexical analysis)是计算机科学中将字符序列转换为单词(Token)序列的过程.进行词法分析的程序或者函数叫作词法分析器(Lexical analyzer, ...
- CVE-2020-2555漏洞复现&&流量分析
CVE-2020-2555漏洞复现&&流量分析 一.准备环境 windows7: weblogic 12.2.1.4.0 JDK版本为jdk-8u261 关于weblogic搭建可以看 ...
- SQL 练习33
查询课程编号为 01 且课程成绩在 80 分以上的学生的学号和姓名 SELECT Student.SId,Student.Sname,Cname,score from Student,Course,S ...