PID控制算法的C语言实现九
(1)微分先行PID控制算法
微分先行PID控制的特点是只对输出量yout(k)进行微分,而对给定值rin(k)不进行微分。这样,在改变给定值时,输出不会改变,而被控量的变化通常是比较缓和的。这种输出量先行微分控制适用于给定值rin(k)频繁升降的场合,可以避免给定值升降时引起系统振荡,从而明显地改善了系统的动态特性
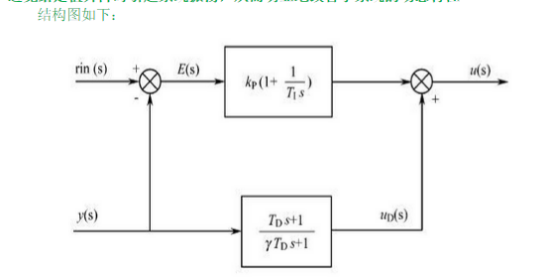
(2)不完全微分PID控制算法
在PID控制中,微分信号的引入可改善系统的动态特性,但也易引进高频
干扰,在误差扰动突变时尤其显出微分项的不足。若在控制算法中加入低通滤波器,则可使系统性能得到改善
不完全微分PID的结构如下图。左图将低通滤波器直接加在微分环节上,右图是将低通滤波器加在整个PID控制器之后

(3)带死区的PID控制算法
在计算机控制系统中,某些系统为了避免控制作用过于频繁,消除由于频繁动作所引起的振荡,可采用带死区的PID控制算法,控制算式为:

式中,e(k)为位置跟踪偏差,e0是一个可调参数,其具体数值可根据实际控制对象由实验确定。若e0值太小,会使控制动作过于频繁,达不到稳定被控对象的目的;若e0太大,则系统将产生较大的滞后 控制算法流程:

注:<我们电子设计竞赛里,在简易倒立摆控制装置中就采用了带死区的PID控制算法,当时并不知道这个名称,这也就是在现场测试的时候为什么老师会问我们摆能够保持倒立静止不动,而不是靠左右抖动来控制平衡,就是因为我在里面设置了死区:好像是5度的角度>
PID控制算法的C语言实现九的更多相关文章
- PID控制算法的C语言实现十一 模糊算法简介
在PID控制算法的C语言实现九中,文章已经对模糊PID的实质做了一个简要说明.本来打算等到完成毕业设计,工作稳定了再着力完成剩下的部分.鉴于网友的要求和信任,抽出时间来,对模糊PID做一个较为详细的论 ...
- PID控制算法的C语言实现
参考: PID控制器开发笔 浅谈位置式PID 专家PID控制在快速系统中的仿真及应用(这篇了论文介绍的积分分离PID.专家PID(脚本实现和simulink实现)很详细) PID控制算法的C语言实现一 ...
- PID控制算法的C语言实现十 专家PID与模糊PID的C语言实现
本节是PID控制算法的C语言实现系列的最后一节,前面8节中,已经分别从PID的实现到深入的过程进行了一个简要的讲解,从前面的讲解中不难看出,PID的控制思想非常简单,其主要问题点和难点在于比例.积分. ...
- PID控制算法的C语言实现三 位置型PID的C语言实现
上一节中已经抽象出了位置性PID和增量型PID的数学表达式,这一节,重点讲解C语言代码的实现过程,算法的C语言实现过程具有一般性,通过PID算法的C语言实现,可以以此类推,设计其它算法的C语言实现. ...
- PID控制算法的C语言实现一 PID算法原理
本系列是转载............. 全部的程序有一个共同点:就是我没认真去调pid的参数 在工业应用中PID及其衍生算法是应用最广泛的算法之一,是当之无愧的万能算法,如果能够熟练掌握PID算法的设 ...
- PID控制算法的C语言实现八 变积分的PID控制算法C语言实现
变积分PID可以看成是积分分离的PID算法的更一般的形式.在普通的PID控制算法中,由于积分系数ki是常数,所以在整个控制过程中,积分增量是不变的.但是,系统对于积分项的要求是,系统偏差大时,积分作用 ...
- PID控制算法的c语言实现十二 模糊PID的参数整定
这几天一直在考虑如何能够把这一节的内容说清楚,对于PID而言应用并没有多大难度,按照基本的算法设计思路和成熟的参数整定方法,就算是没有经过特殊训练和培训的人,也能够在较短的时间内容学会使用PID算法. ...
- PID控制算法的C语言实现六 抗积分饱和的PID控制算法C语言实现
所谓的积分饱和现象是指如果系统存在一个方向的偏差,PID控制器的输出由于积分作用的不断累加而加大,从而导致执行机构达到极限位置,若控制器输出U(k)继续增大,执行器开度不可能再增大,此时计算机输出控制 ...
- PID控制算法的C语言实现五 积分分离的PID控制算法C语言实现
在普通PID控制中,引入积分环节的目的主要是为了消除静差,提高控制精度.但在过程的启动.结束或大幅度增减设定时,短时间内系统输出有很大的偏差,会造成PID运算的积分积累,致使控制量超过执行机构可能允许 ...
随机推荐
- Lua学习笔记(3):运算符
算术运算符 运算符 描述 + 加法运算符 - 减法运算符 * 乘法运算符 / 除法运算符 % 取模运算符 ^ 乘幂 A=3 print(A^2)输出9 关系运算符 ~= 不等于 == 等于 > ...
- centos 7.2 安装apache,mysql,php5.6
安装Apache.PHP.Mysql.连接Mysql数据库的包: yum -y install httpd yum -y install php yum -y install php-fpm yum ...
- 2.openldap安装
1.安装步骤如下 获取软件包 安装软件包(rpm或者源码编译) 生产openldap配置文件及数据库文件 配置 添加目录树条目 加载slapd进程 验证 2.所需安装包说明 openldap,open ...
- underscore.js源码解析(三)
最近工作比较忙,做不到每周两篇了,周末赶着写吧,上篇我针对一些方法进行了分析,今天继续. 没看过前两篇的可以猛戳这里: underscore.js源码解析(一) underscore.js源码解析(二 ...
- Python学习之路7 - 生成器&迭代器
本章内容: 列表生成式 生成器 yield 迭代器 列表生成式 当我们要定义一个列表的时候,我们通常用这种方式a = [1,2,3],但是如果我们定义了一个比较长的列表的时候,手动定义列表就会比较麻烦 ...
- 按照Right-BICEP要求设计四则运算3程序的单元测试用例
按照Right-BICEP要求: Right——结果是否正确? B——是否所有的边界条件都是正确的? I——能查一下反响关联吗? C——能用其它手段交叉检查一下吗? E——你是否可以强制错误条件发生? ...
- P4环境搭建
P4环境搭建 执行仓库中所有脚本,即可即可安装所有依赖项. GitHub链接 脚本执行顺序:deps,p4c-bm,bmv2,p4c
- 软工实践-Alpha 冲刺 (9/10)
队名:起床一起肝活队 组长博客:博客链接 作业博客:班级博客本次作业的链接 组员情况 组员1(队长):白晨曦 过去两天完成了哪些任务 描述: 已经解决登录注册等基本功能的界面. 完成非功能的主界面制作 ...
- Nginx 配置站点
1-进入 配置文件夹 cd /etc/nginx/cof.d 2-创建一个一站点名称命名的配置文件 vim kestrel-syslyracom.conf 3-在.conf 文件中输入 ...
- 在selenium测试中使用XPATH功能函数starts-with、contains、descendant、ancestor、text()定位网页元素
项目中一些使用xpath函数的复杂例子,记录于此 1. 使用starts-with //div[starts-with(@id,'res')]//table//tr//td[2]//table//tr ...