android camera(三):camera V4L2 FIMC
1. V4L2
1)简介
在Linux中,摄像头方面的标准化程度比较高,这个标准就是V4L2驱动程序,这也是业界比较公认的方式。
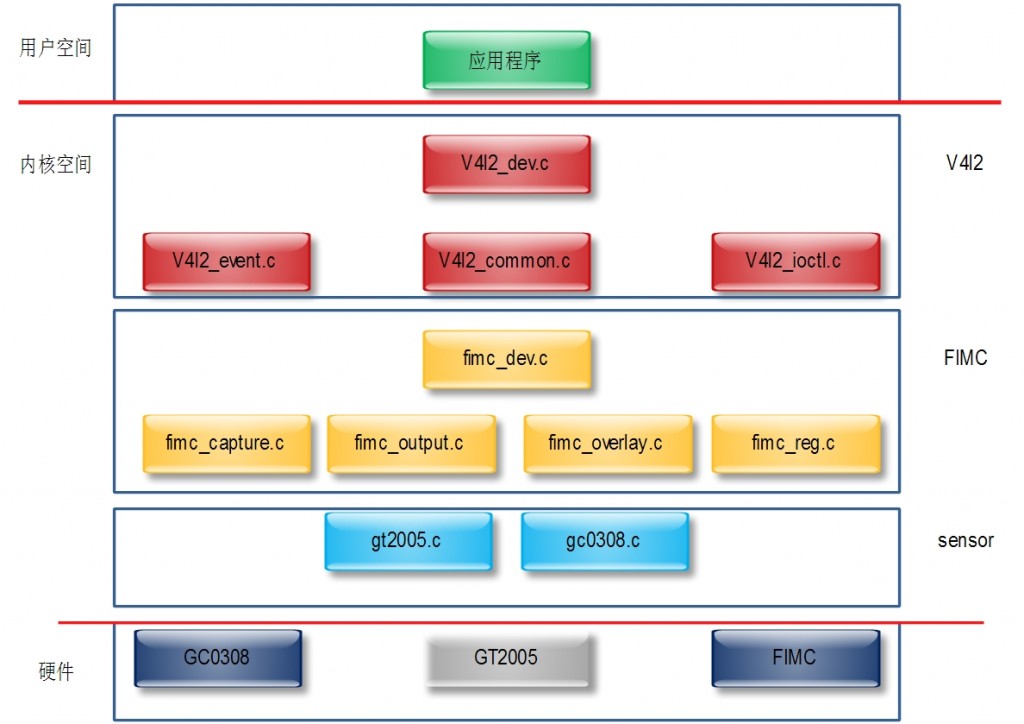
V4L全称是Video for Linux,是Linux内核中标准的关于视频驱动程序,目前使用比较多的版本是Video for Linux 2,简称V4L2。它为Linux下的视频驱动提供了统一的接口,使得应用程序可以使用统一的API操作不同的视频设备。从内核空间到用户空间,主要的数据流和控制类均由V4L2驱动程序的框架来定义。
V4L2驱动程序一般只提供Video数据的获得,而如何实现视频预览,如何向上层发送数据,如何把纯视频流和取景器、视频录制等实际业务组织起来,都是camera的硬件抽象层需要负责的工作。
V4L2驱动核心实现为如下文件:drivers/media/video/v4l2-dev.c。
V4l2-dev.h中定义的video_device是V4L2驱动程序的核心数据结构,它为具体的摄像头sensor驱动提供了接口调用。
V4l2的采集过程(应用程序):
1) 打开设备,获得文件描述符;
2) 设置图片格式;
3) 分配缓冲区;
4) 启动采集过程,读取数据;
5) 停止采集,关闭设备。
2)数据结构
V4L2的主要数据结构是video_device,定义在v4l2_dev.h中:
- struct video_device
- {
- /* device ops */
- const struct v4l2_file_operations *fops; /*接口函数指针*/
- /* sysfs */
- struct device dev; /* v4l 设备结构 */
- struct cdev *cdev; /* 字符设备结构*/
- /* Set either parent or v4l2_dev if your driver uses v4l2_device */
- struct device *parent; /* 设备父指针 */
- struct v4l2_device *v4l2_dev; /* v4l2设备指针*/
- /* device info */
- char name[32]; /*设备名称*/
- int vfl_type;
- /* 'minor' is set to -1 if the registration failed */
- int minor; /*次设备号*/
- u16 num;
- /* use bitops to set/clear/test flags */
- unsigned long flags;
- /* attribute to differentiate multiple indices on one physical device */
- int index;
- /* V4L2 file handles */
- spinlock_t fh_lock; /* Lock for all v4l2_fhs */
- struct list_head fh_list; /* List of struct v4l2_fh */
- int debug; /* debug 级别*/
- /* Video 标准变量 */
- v4l2_std_id tvnorms; /* Supported tv norms */
- v4l2_std_id current_norm; /* Current tvnorm */
- /* 回调函数 */
- void (*release)(struct video_device *vdev);
- /* ioctl 回调函数 */
- const struct v4l2_ioctl_ops *ioctl_ops;
- };
主要接口函数有:
intvideo_register_device(struct video_device *vdev, int type, int nr);
static intv4l2_ioctl(struct inode *inode, struct file *filp, unsigned int cmd, unsigned long arg);
2. FIMC
1)简介
FIMC这个模块不仅仅是一个摄像头的控制接口,它还承担着V4L2的output功能和overlay的功能。
FIMC的驱动在内核中的位置:drivers/media/video/samsung/fimc
它包含下边的文件:
fimc_regs.c
fimc_capture.c
fimc_dev.c
fimc_output.c
fimc_overlay.c
fimc_v4l2.c
它们的组织关系如下:
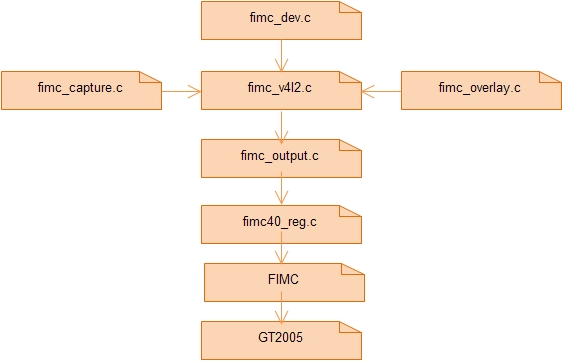
可以看到,FIMC的驱动实现了v4l2所有的接口,可以分为v4l2-input设备接口,v4l2-output设备接口以及v4l2-overlay设备接口。这里我们主要关注v4l2-input设备接口,因为摄像头属于视频输入设备。
fimc_v4l2.c里面注册了很多的回调函数,都是用于实现v4l2的标准接口的,但是这些回调函数基本上都不是在fimc_v4l2.c里面实现的,而是有相应的.c分别去实现。比如:
v4l2-input设备的操作实现:fimc_capture.c
v4l2-output设备的操作实现: fimc_output.c
v4l2-overlay设备的操作实现: fimc_overlay.c
这些代码其实都是和具体硬件操作无关的,这个驱动把所有操作硬件寄存器的代码都写到一个文件里面了,就是fimc40_regs.c。这样把硬件相关的代码和硬件无关的代码分开来实现是非常好的方式,可以最大限度的实现代码复用。
2) 数据结构
FIMC的主要数据结构fimc_control,定义在fimc.h中:
- struct fimc_control {
- int id; /* 控制器 id */
- char name[16];
- atomic_t in_use;
- void __iomem *regs; /* 寄存器 i/o */
- struct clk *clk; /* interface clock */
- struct regulator *regulator; /* pd regulator */
- struct fimc_meminfo mem; /* for reserved mem */
- /* kernel helpers */
- struct mutex lock; /* controller lock */
- struct mutex alloc_lock;
- struct mutex v4l2_lock;
- wait_queue_head_t wq;
- struct device *dev;
- int irq;
- /* v4l2 related */
- struct video_device *vd;
- struct v4l2_device v4l2_dev;
- /* fimc specific */
- struct fimc_limit *limit; /* H/W limitation */
- struct s3c_platform_camera *cam; /* activated camera */
- struct fimc_capinfo *cap; /* capture dev info */
- struct fimc_outinfo *out; /* output dev info */
- struct fimc_fbinfo fb; /* fimd info */
- struct fimc_scaler sc; /* scaler info */
- struct fimc_effect fe; /* fimc effect info */
- enum fimc_status status;
- enum fimc_log log;
- u32 ctx_busy[FIMC_MAX_CTXS];
- };
因为FIMC一共有三套一样的控制器(fimc0, fimc1, fimc2),所以驱动里使用了一个数组来描述:
- struct video_device fimc_video_device[FIMC_DEVICES] = {
- [0] = {
- .fops = &fimc_fops,
- .ioctl_ops = &fimc_v4l2_ops,
- .release = fimc_vdev_release,
- },
- [1] = {
- .fops = &fimc_fops,
- .ioctl_ops = &fimc_v4l2_ops,
- .release = fimc_vdev_release,
- },
- [2] = {
- .fops = &fimc_fops,
- .ioctl_ops = &fimc_v4l2_ops,
- .release = fimc_vdev_release,
- },
- };
fb_ops结构体是针对v4l2设备的基本操作,定义如下:
- static const struct v4l2_file_operations fimc_fops = {
- .owner = THIS_MODULE,
- .open = fimc_open,
- .release = fimc_release,
- .ioctl = video_ioctl2,
- .read = fimc_read,
- .write = fimc_write,
- .mmap = fimc_mmap,
- .poll = fimc_poll,
- };
3)FIMC初始设置
在S5PV210中,FIMC初始设置代码在 /drivers/ arch/arm/mach-s5pv210/mach-smdkv310.c中:
- static struct s3c_platform_fimc fimc_plat = {
- .srclk_name = "mout_mpll",
- .clk_name = "sclk_fimc",
- .lclk_name = "sclk_fimc_lclk",
- .clk_rate = 166750000,
- .default_cam = CAMERA_CSI_C,
- .camera = {
- &mt9p111,//5M back cam
- &s5k6aafx,///1.3M front cam
- },
- .hw_ver = 0x43,
- };
对于GPIO的配置代码在 /drivers/ arch/arm/mach-s5pv210/setup-fimc0.c中:
- oid s3c_fimc0_cfg_gpio(struct platform_device *pdev)
- {
- int i = 0;
- /* CAM A port(b0010) : PCLK, VSYNC, HREF, DATA[0-4] */
- for (i = 0; i < 8; i++) {
- s3c_gpio_cfgpin(S5PV210_GPE0(i), S3C_GPIO_SFN(2));
- s3c_gpio_setpull(S5PV210_GPE0(i), S3C_GPIO_PULL_NONE);
- }
- /* CAM A port(b0010) : DATA[5-7], CLKOUT(MIPI CAM also), FIELD */
- for (i = 0; i < 5; i++) {
- s3c_gpio_cfgpin(S5PV210_GPE1(i), S3C_GPIO_SFN(2));
- s3c_gpio_setpull(S5PV210_GPE1(i), S3C_GPIO_PULL_NONE);
- }
- /* CAM B port(b0011) : DATA[0-7] */
- for (i = 0; i < 8; i++) {
- s3c_gpio_cfgpin(S5PV210_GPJ0(i), S3C_GPIO_SFN(3));
- s3c_gpio_setpull(S5PV210_GPJ0(i), S3C_GPIO_PULL_NONE);
- }
- /* CAM B port(b0011) : PCLK, VSYNC, HREF, FIELD, CLCKOUT */
- for (i = 0; i < 5; i++) {
- s3c_gpio_cfgpin(S5PV210_GPJ1(i), S3C_GPIO_SFN(3));
- s3c_gpio_setpull(S5PV210_GPJ1(i), S3C_GPIO_PULL_NONE);
- }
- }
4)接口函数
FIMC的主要回调函数如下,实现在fimc_v4l2.c中:
- onst struct v4l2_ioctl_ops fimc_v4l2_ops = {
- .vidioc_querycap = fimc_querycap,
- .vidioc_reqbufs = fimc_reqbufs,
- .vidioc_querybuf = fimc_querybuf,
- .vidioc_g_ctrl = fimc_g_ctrl,
- .vidioc_s_ctrl = fimc_s_ctrl,
- .vidioc_s_ext_ctrls = fimc_s_ext_ctrls,
- .vidioc_cropcap = fimc_cropcap,
- .vidioc_g_crop = fimc_g_crop,
- .vidioc_s_crop = fimc_s_crop,
- .vidioc_streamon = fimc_streamon,
- .vidioc_streamoff = fimc_streamoff,
- .vidioc_qbuf = fimc_qbuf,
- .vidioc_dqbuf = fimc_dqbuf,
- .vidioc_enum_fmt_vid_cap = fimc_enum_fmt_vid_capture,
- .vidioc_g_fmt_vid_cap = fimc_g_fmt_vid_capture,
- .vidioc_s_fmt_vid_cap = fimc_s_fmt_vid_capture,
- .vidioc_try_fmt_vid_cap = fimc_try_fmt_vid_capture,
- .vidioc_enum_input = fimc_enum_input,
- .vidioc_g_input = fimc_g_input,
- .vidioc_s_input = fimc_s_input,
- .vidioc_g_parm = fimc_g_parm,
- .vidioc_s_parm = fimc_s_parm,
- .vidioc_queryctrl = fimc_queryctrl,
- .vidioc_querymenu = fimc_querymenu,
- .vidioc_g_fmt_vid_out = fimc_g_fmt_vid_out,
- .vidioc_s_fmt_vid_out = fimc_s_fmt_vid_out,
- .vidioc_try_fmt_vid_out = fimc_try_fmt_vid_out,
- .vidioc_g_fbuf = fimc_g_fbuf,
- .vidioc_s_fbuf = fimc_s_fbuf,
- .vidioc_try_fmt_vid_overlay = fimc_try_fmt_overlay,
- .vidioc_g_fmt_vid_overlay = fimc_g_fmt_vid_overlay,
- .vidioc_s_fmt_vid_overlay = fimc_s_fmt_vid_overlay,
- };
对于寄存器的操作,实现都在fimc_regs.c文件中,如
- int fimc_hwset_camera_source(struct fimc_control *ctrl)
- {
- struct s3c_platform_camera *cam = ctrl->cam;
- u32 cfg = 0;
- cfg |= S3C_CISRCFMT_ITU601_8BIT;
- cfg |= cam->order422;
- if (cam->type == CAM_TYPE_ITU)
- cfg |= cam->fmt;
- cfg |= S3C_CISRCFMT_SOURCEHSIZE(cam->width);
- cfg |= S3C_CISRCFMT_SOURCEVSIZE(cam->height);
- writel(cfg, ctrl->regs + S3C_CISRCFMT);
- return 0;
- }
- int fimc_hwset_enable_irq(struct fimc_control *ctrl, int overflow, int level)
- {
- u32 cfg = readl(ctrl->regs + S3C_CIGCTRL);
- cfg &= ~(S3C_CIGCTRL_IRQ_OVFEN | S3C_CIGCTRL_IRQ_LEVEL);
- cfg |= S3C_CIGCTRL_IRQ_ENABLE;
- if (overflow)
- cfg |= S3C_CIGCTRL_IRQ_OVFEN;
- if (level)
- cfg |= S3C_CIGCTRL_IRQ_LEVEL;
- writel(cfg, ctrl->regs + S3C_CIGCTRL);
- return 0;
- }
android camera(三):camera V4L2 FIMC的更多相关文章
- 【转】android camera(三):camera V4L2 FIMC
关键词:android camera CMM 模组 camera参数 CAMIF V4L2 平台信息:内核:linux系统:android 平台:S5PV310(samsung exynos ...
- sc7731 Android 5.1 Camera 学习之一Camera 两个对象
众所周知,在Android中Camera采用了C/S架构,其中Camera server 与 Camera client之间通过Android Binder IPC机制进行通信.在Camera实现的框 ...
- 【转】[Android编程心得] Camera(OpenCV)自动对焦和触摸对焦的实现
参考http://stackoverflow.com/questions/18460647/android-setfocusarea-and-auto-focus http://blog.csdn.n ...
- Android 自带 camera 详解
在本文中 需要考虑的问题 概述 Manifest声明 使用内置的摄像头应用程序 捕获图像的intent 捕获视频的intent 接收摄像头intent的结果 创建摄像头应用程序 检测摄像头硬件 访问摄 ...
- Android中利用Camera与Matrix实现3D效果详解
本文行文目录: 一.Camera与Matrix初步认识 二.Camera与Matrix旋转效果拆分介绍 三.Camera与Matrix实现立体3D切换效果 [csdn地址:http://blog.cs ...
- [Android编程心得] Camera(OpenCV)自动对焦和触摸对焦的实现
写在前面 最近在从零开始写一个移动端的AR系统,坑实在是太多了!!!整个项目使用了OpenCV第三方库,但对于摄像机来说,和原生Camera的方法基本相同. 实现 以OpenCV的JavaCamera ...
- Android 5.1 Camera 架构学习之Camera初始化
Android Camera 采用C/S架构,client 与server两个独立的线程之间(CameraService)使用Binder通信. 一 CameraService的注册. 1.手机开机后 ...
- Android开发技巧——Camera拍照功能
本篇是我对开发项目的拍照功能过程中,对Camera拍照使用的总结.由于camera2是在api level 21(5.0.1)才引入的,而Camera到6.0仍可使用,所以暂未考虑camera2. 文 ...
- Android 自定义属性动画&Camera动画
摘要: Android 自定义属性动画&Camera动画 1.相关知识点 对于Androi的帧动画,可以制作gif图片,有时为了能够动态的生成帧动画,就得需要使用代码构建了 Animati ...
- Cesium案例解析(三)——Camera相机
目录 1. 概述 2. 实例 2.1. Camera.html 2.2. Camera.js 2.2.1. 飞行至某一点 2.2.2. 飞行至某区域 2.2.3. 两地之间飞行 2.2.4. 设置视图 ...
随机推荐
- MongoDB笔记(五)深入学习
系列一:http://www.cnblogs.com/huangxincheng/category/355399.html系列二:http://www.cnblogs.com/lipan/catego ...
- mysql数据库导出时报错mysqldump: Got error: 145的解决方法
在给mysql数据库备份时,报错:mysqldump: Got error: 145: Table './jxzhtopenfire/ofoffline' is marked as crashed ...
- nginx 显示discuz页面
我也不知道我题目表述的对不对.我也是刚学习. 安装nginx 显示discuz的界面.我看了好几次视频,也没发现哪的问题.就是一直出现502的错误代码 我又重新查了几次.觉得需要注意一下几点: 1,关 ...
- overflow:hidden真的失效了吗
项目中常常有同学遇到这样的问题,现象是给元素设置了overflow:hidden,但超出容器的部分并没有被隐藏,难道是设置的hidden失效了吗? 其实看似不合理的现象背后都会有其合理的解释. 我们知 ...
- PHPExcel1
下面是总结的几个使用方法 include 'PHPExcel.php'; include 'PHPExcel/Writer/Excel2007.php'; //或者include 'PHPExcel/ ...
- Pentaho Data Integration Step: BD Procedure Call
官网连接:http://wiki.pentaho.com/display/EAI/Call+DB+Procedure 描述 调用数据库存储过程步骤允许用户执行一个数据库存储过程,并且得到结果.存储过程 ...
- delphi xe5 android 开发数据访问server端(二)
上一篇我们创建了一个拟给手机端访问的webservices服务 接下来创建一个返回数据集的过程,用webservices发布,供手机端调用.这里我使用firedac 1.打开上一篇自动创建的WebMo ...
- 一个奇怪的编码 big5-hkscs
# --*-- coding:utf-8 --*-- import urllib2 import urllib postDict = { 'IsExist_Slt_Part_Id': 'False', ...
- Mybatis 学习
1. Mybatis 中 # 与 $ 符号的区别: a. #将传入的数据都当成一个字符串,会对自动传入的数据加一个双引号. 如:order by #user_id#,如果传入的值是12,那么解 ...
- hdu 4738
桥的应用! 虽然以前做过强联通分量的题,但刷的很水,所以比赛的时候一直想不起来是桥的应用: 反省一下~~~学习一下! 思路,找到权值最小的桥:用tarjin算法! 代码: #include<cs ...