UMHexagonS搜索过程
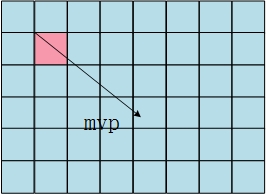
通过相邻块的预测得到mvp后,会以mvp为基础搜索最佳的匹配块,UMHexagonS就是h.264中用的一种搜索算法。
UMHexagonS是一种整像素搜索算法,也就是搜索过程中,参考图像一直都是原来的重构图像,并没有使用经过插值的图像进行搜索。
首先UMHexagonS会根据相关信息去得到比较有可能的mv,(然后用小菱形搜索到该区域去搜索该区域中的最佳mv,这种情况会在下面注明,至于如何才算最佳,请参照http://www.cnblogs.com/TaigaCon/p/3790218.html)
由于UMHexagonS是一种整像素搜索算法,所以会存在对分数的mv取整的情况,此时取整是指把mv对齐到某个像素上,消去分数部分
首先需要选取合适的搜索起点,有以下几种起点的选择
1.mvp
由于还是整像素搜索,所以这里需要对mvp取整,得到的整数的mv后采用小菱形搜索以得到比较优秀的mv。
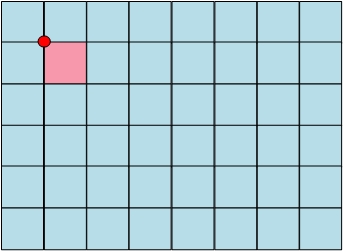
2.原点
原点,即mv为0,即当前块的位置(然后采用小菱形搜索)
3.上层块mv
参考下图,如果当前块为8x8,那么覆盖当前块的16x8块就是其上层块
运动搜索中,分块模式有7种
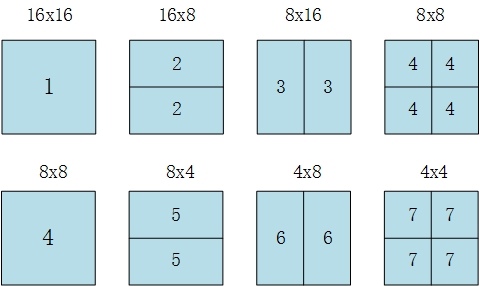
模式4的上层模式为2,模式7的上层模式为4

4.共同位置块mv,取上一参考图像与当前块相同位置的块的mv,然后取整
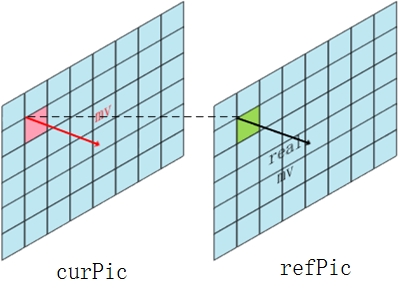
5.共同位置参考mv通过参考图像距离计算后得到的mv,然后取整

6.最后还采用一次小菱形搜索
这里的小菱形搜索主要为了对上面3、4、5预测后得到的最佳mv再采用一次小菱形搜索以得到该区域内最佳mv
小菱形搜索就是把mv的x,y分别+1,-1后得到的新mv,然后各自对比得到其中最优的mv

Early Termination
通过上面的步骤得到最优的搜索起点后,需要计算该mv的匹配满意程度,以跳转做不同的后续搜索处理,该过程叫Early Termination。
Early Termination由于涉及到数学上的分析,所以会在后面的章节再细述。
Early Termination有两个个跳转出口,分别代表不同的匹配满意程度:
- Extended Hexagon-based Search(六边形模板反复搜索) 满意
- the third step with a small search pattern(小菱形模板反复搜索) 很满意
但是如果在不甚满意的情况下,Early Termination会不作跳转,直接执行下一步
UMH搜索
经过上面步骤后,得到其中最佳的搜索起点的mv,如果该mv经Early Termination判断为不甚满意,会以该mv为中心,直接开始UMH搜索。UMH搜索有以下步骤
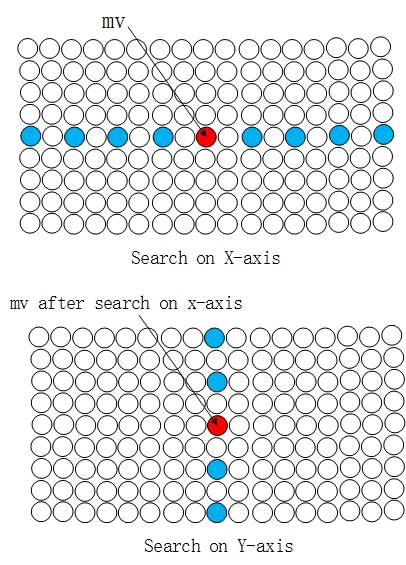
1.Unsymmetrical-cross search(非对称十字搜索)
非对称十字搜索会先后对x轴与y轴进行搜索,y轴的搜索范围是x轴的一半,这是因为在一般的视频中,镜头的纵向移动距离会比较短,横向移动距离会比较长,而且比较常见。搜索时,横轴的搜索范围是search range,而纵轴会是它的一般。
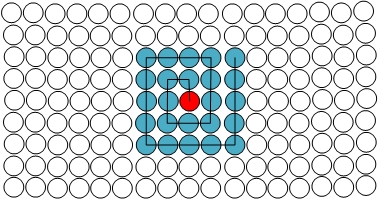
2.Spiral search(螺旋搜索)
螺旋搜索采用的是full search(全搜索)的搜索方法,但是搜索步长只有24,相当于5x5的区域。而全搜索会对整个搜索范围进行搜索。
3.Uneven Multi-Hexagon-grid Search(不规律六边形模板搜索)
这种搜索方式是以当前mv指向的像素点为圆心,一圈一圈地往外搜索,一旦在某个圈内搜索到更佳的位置,立刻停止搜索,否则搜索完整个搜索范围

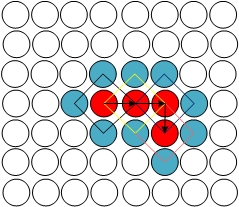
4.Extended Hexagon-based Search(六边形模板反复搜索)
不同于上一个搜索方式,这种搜索方式是以当前最佳mv指向的像素点为圆心,进行一次六边形模板搜索,一旦搜索到某个更佳的位置,则以此位置为圆心,重新进行一次六边形模板搜索。如果没有比圆心更佳的位置,则终止搜索。

5.the third step with a small search pattern(小菱形模板反复搜索)
类似Extended Hexagon-based Search(六边形模板反复搜索)的搜索方式,不过把六边形换成了菱形
以上可参照jvt-G016
JM8.6
/*!
************************************************************************
* \brief用非对称十字形多层次六边形格点搜索算法进行运动搜索
* FastIntegerPelBlockMotionSearch: fast pixel block motion search
* this algrithm is called UMHexagonS(see JVT-D016),which includes
* four steps with different kinds of search patterns
* \par Input:
* pel_t** orig_pic, // <-- original picture
* int ref, // <-- reference frame (0... or -1 (backward))
* int pic_pix_x, // <-- absolute x-coordinate of regarded AxB block
* int pic_pix_y, // <-- absolute y-coordinate of regarded AxB block
* int blocktype, // <-- block type (1-16x16 ... 7-4x4)
* int pred_mv_x, // <-- motion vector predictor (x) in sub-pel units
* int pred_mv_y, // <-- motion vector predictor (y) in sub-pel units
* int* mv_x, // --> motion vector (x) - in pel units
* int* mv_y, // --> motion vector (y) - in pel units
* int search_range, // <-- 1-d search range in pel units
* int min_mcost, // <-- minimum motion cost (cost for center or huge value)
* double lambda // <-- lagrangian parameter for determining motion cost
* \par
* Three macro definitions defined in this program:
* 1. EARLY_TERMINATION: early termination algrithm, refer to JVT-D016.doc
* 2. SEARCH_ONE_PIXEL: search one pixel in search range
* 3. SEARCH_ONE_PIXEL1(value_iAbort): search one pixel in search range,
* but give a parameter to show if mincost refeshed
* \ Main contributors: (see contributors.h for copyright, address and affiliation details)
* Zhibo Chen <chenzhibo@tsinghua.org.cn>
* JianFeng Xu <fenax@video.mdc.tsinghua.edu.cn>
* \date : 2003.8
************************************************************************
*/
int // ==> minimum motion cost after search
FastIntegerPelBlockMotionSearch (pel_t** orig_pic, // <-- not used
int ref, // <-- reference frame (0... or -1 (backward))
int list,
int pic_pix_x, // <-- absolute x-coordinate of regarded AxB block
int pic_pix_y, // <-- absolute y-coordinate of regarded AxB block
int blocktype, // <-- block type (1-16x16 ... 7-4x4)
int pred_mv_x, // <-- motion vector predictor (x) in sub-pel units MV_pred_space 中值预测矢量
int pred_mv_y, // <-- motion vector predictor (y) in sub-pel units
int* mv_x, /* --> motion vector (x) - in pel units
按照H.264标准算法进行的运动矢量预测得到MV_pred
指的是SetMotionVectorPreditor函数预测的MV
和中值预测的区别在于SetMotionVectorPreditor函数预测的MV的参考邻块和当前块必须参
考同一个参考帧,而中值预测的邻块则没有这个要求,二者可能一样,也可能不同*/
int* mv_y, // --> motion vector (y) - in pel units
int search_range, // <-- 1-d search range in pel units
int min_mcost, // <-- minimum motion cost (cost for center or huge value)
double lambda) // <-- lagrangian parameter for determining motion cost
{
static int Diamond_x[4] = {-1, 0, 1, 0};//对应不同算法 菱形插值
static int Diamond_y[4] = {0, 1, 0, -1};
static int Hexagon_x[6] = {2, 1, -1, -2, -1, 1};//六角形插值
static int Hexagon_y[6] = {0, -2, -2, 0, 2, 2};
static int Big_Hexagon_x[16] = {0,-2, -4,-4,-4, -4, -4, -2, 0, 2, 4, 4, 4, 4, 4, 2};
static int Big_Hexagon_y[16] = {4, 3, 2, 1, 0, -1, -2, -3, -4, -3, -2, -1, 0, 1, 2, 3};//大六角形插值 int pos, cand_x, cand_y, mcost;
pel_t *(*get_ref_line)(int, pel_t*, int, int, int, int);
int list_offset = ((img->MbaffFrameFlag)&&(img->mb_data[img->current_mb_nr].mb_field))? img->current_mb_nr%2 ? 4 : 2 : 0;
pel_t* ref_pic = listX[list+list_offset][ref]->imgY_11;//img->type==B_IMG? Refbuf11 [ref+((mref==mref_fld)) +1] : Refbuf11[ref];
int best_pos = 0; // position with minimum motion cost
int max_pos = (2*search_range+1)*(2*search_range+1); // number of search positions
int lambda_factor = LAMBDA_FACTOR (lambda); // factor for determining lagragian motion cost
int mvshift = 2; // motion vector shift for getting sub-pel units
int blocksize_y = input->blc_size[blocktype][1]; // vertical block size
int blocksize_x = input->blc_size[blocktype][0]; // horizontal block size
int blocksize_x4 = blocksize_x >> 2; // horizontal block size in 4-pel units
int pred_x = (pic_pix_x << mvshift) + pred_mv_x; // predicted position x (in sub-pel units)
int pred_y = (pic_pix_y << mvshift) + pred_mv_y; // predicted position y (in sub-pel units)
int center_x = pic_pix_x + *mv_x; // center position x (in pel units)
int center_y = pic_pix_y + *mv_y; // center position y (in pel units)
int best_x, best_y;
int check_for_00 = (blocktype==1 && !input->rdopt && img->type!=B_SLICE && ref==0);
int search_step,iYMinNow, iXMinNow;
int i,m, iSADLayer;
int iAbort;
int N_Bframe = input->successive_Bframe;
float betaSec,betaThird;
int height=((img->MbaffFrameFlag)&&(img->mb_data[img->current_mb_nr].mb_field))?img->height/2:img->height; //===== set function for getting reference picture lines =====
if ((center_x > search_range) && (center_x < img->width -1-search_range-blocksize_x) &&
(center_y > search_range) && (center_y < height-1-search_range-blocksize_y) )
{
get_ref_line = FastLineX;
}
else
{
get_ref_line = UMVLineX; //无运动矢量限制,需像素拓展
} //////allocate memory for search state//////////////////////////
//初始化搜索标记
memset(McostState[0],0,(2*search_range+1)*(2*search_range+1)*4); ///////Threshold defined for early termination///////////////////
//为早期终止设定门限值
if(ref>0)
{
if(pred_SAD_ref!=0)
{
betaSec = Bsize[blocktype]/(pred_SAD_ref*pred_SAD_ref)-AlphaSec[blocktype];
betaThird = Bsize[blocktype]/(pred_SAD_ref*pred_SAD_ref)-AlphaThird[blocktype];
}
else
{
betaSec = 0;
betaThird = 0;
}
}
else
{
if(blocktype==1)
{
if(pred_SAD_space !=0)
{
betaSec = Bsize[blocktype]/(pred_SAD_space*pred_SAD_space)-AlphaSec[blocktype];
betaThird = Bsize[blocktype]/(pred_SAD_space*pred_SAD_space)-AlphaThird[blocktype];
}
else
{
betaSec = 0;
betaThird = 0;
}
}
else
{
if(pred_SAD_uplayer !=0)
{
betaSec = Bsize[blocktype]/(pred_SAD_uplayer*pred_SAD_uplayer)-AlphaSec[blocktype];
betaThird = Bsize[blocktype]/(pred_SAD_uplayer*pred_SAD_uplayer)-AlphaThird[blocktype];
}
else
{
betaSec = 0;
betaThird = 0;
}
}
}
/*********检测中值预测矢量**************//*其实就是把得到的mv_pred取整得到的预测矢量*/
// MV_pred_space 中值预测矢量
//check the center median predictor
cand_x = center_x ;
cand_y = center_y ;
mcost = MV_COST (lambda_factor, mvshift, cand_x, cand_y, pred_x, pred_y);//通过计算候选mv所占用的bit得到mv_cost = lambda * bit_of_mv
mcost = PartCalMad(ref_pic, orig_pic, get_ref_line,blocksize_y,blocksize_x,blocksize_x4,mcost,min_mcost,cand_x,cand_y);//cost = mv_cost + SAD
McostState[search_range][search_range] = mcost;
if (mcost < min_mcost)
{
min_mcost = mcost;
best_x = cand_x;
best_y = cand_y;
} iXMinNow = best_x;
iYMinNow = best_y;
for (m = 0; m < 4; m++) //小菱形检测
{
cand_x = iXMinNow + Diamond_x[m];
cand_y = iYMinNow + Diamond_y[m];
SEARCH_ONE_PIXEL
}
/*****************原点检测***************************************/
if(center_x != pic_pix_x || center_y != pic_pix_y)
{
cand_x = pic_pix_x ;
cand_y = pic_pix_y ;
SEARCH_ONE_PIXEL iXMinNow = best_x;
iYMinNow = best_y;
for (m = 0; m < 4; m++)//小菱形检测
{
cand_x = iXMinNow + Diamond_x[m];
cand_y = iYMinNow + Diamond_y[m];
SEARCH_ONE_PIXEL
}
}
/**********************上层块预测矢量检测*********************************/
if(blocktype>1)//
{
cand_x = pic_pix_x + (pred_MV_uplayer[0]/4);
cand_y = pic_pix_y + (pred_MV_uplayer[1]/4);
SEARCH_ONE_PIXEL
if ((min_mcost-pred_SAD_uplayer)<pred_SAD_uplayer*betaThird)
goto third_step;
else if((min_mcost-pred_SAD_uplayer)<pred_SAD_uplayer*betaSec)
goto sec_step;
}
/****************相应块预测***************************************/ //coordinate position prediction
if ((img->number > 1 + ref && ref!=-1) || (list == 1 && (Bframe_ctr%N_Bframe) > 1)) //for debug
{
cand_x = pic_pix_x + pred_MV_time[0]/4;
cand_y = pic_pix_y + pred_MV_time[1]/4;
SEARCH_ONE_PIXEL
}
/******************相邻参考帧预测*********************************/ //prediciton using mV of last ref moiton vector
if (input->PicInterlace == FIELD_CODING)//场编码,用最近的场MV预测
{
if ((list==0 && ref > 0) || (img->type == B_SLICE && list == 0 && (ref==0 ||ref==2 ) ))
//Notes: for interlace case, ref==1 should be added
{
cand_x = pic_pix_x + pred_MV_ref[0]/4;
cand_y = pic_pix_y + pred_MV_ref[1]/4;
SEARCH_ONE_PIXEL
}
}
else
{ //多参考帧预测时,用另一帧的MV预测
if ((list==0 && ref > 0) || (img->type == B_SLICE && list == 0 && ref==0 ))
//Notes: for interlace case, ref==1 should be added
{
cand_x = pic_pix_x + pred_MV_ref[0]/4;
cand_y = pic_pix_y + pred_MV_ref[1]/4;
SEARCH_ONE_PIXEL
}
}
//small local search
iXMinNow = best_x;
iYMinNow = best_y;
for (m = 0; m < 4; m++)//小菱形搜索
{
cand_x = iXMinNow + Diamond_x[m];
cand_y = iYMinNow + Diamond_y[m];
SEARCH_ONE_PIXEL
} //early termination algrithm, refer to JVT-D016
//根据SAD值判断需要跳转的步骤,SAD较小时转到步骤3,较大时转到步骤2,很大时转到步骤1
EARLY_TERMINATION if(blocktype>6)
goto sec_step;
else
goto first_step; first_step: //Unsymmetrical-cross search 不甚满意
iXMinNow = best_x;
iYMinNow = best_y; for(i=1;i<=search_range/2;i++)//水平方向搜索
{
search_step = 2*i - 1;
cand_x = iXMinNow + search_step;
cand_y = iYMinNow ;
SEARCH_ONE_PIXEL
cand_x = iXMinNow - search_step;
cand_y = iYMinNow ;
SEARCH_ONE_PIXEL
} //垂直方向搜索,注意垂直方向搜索点比水平方向少,考虑到了水平方向较垂直方向重要
for(i=1;i<=search_range/4;i++)
{
search_step = 2*i - 1;
cand_x = iXMinNow ;
cand_y = iYMinNow + search_step;
SEARCH_ONE_PIXEL
cand_x = iXMinNow ;
cand_y = iYMinNow - search_step;
SEARCH_ONE_PIXEL
}
//early termination algrithm, refer to JVT-D016
//在这里也进行中止、跳转检测,考虑到一般序列中含有大量水平、垂直方向的运动。
EARLY_TERMINATION iXMinNow = best_x;
iYMinNow = best_y;
//螺旋搜索,类似全搜索法,只搜索前25点,相当于5×5区域全搜索
for(pos=1;pos<25;pos++)
{
cand_x = iXMinNow + spiral_search_x[pos];
cand_y = iYMinNow + spiral_search_y[pos];
SEARCH_ONE_PIXEL
}
//early termination algrithm, refer to JVT-D016
EARLY_TERMINATION // Uneven Multi-Hexagon-grid Search
//超六边形模板搜索,(多圈)
for(i=1;i<=search_range/4; i++)
{
iAbort = 0;
for (m = 0; m < 16; m++)
{
cand_x = iXMinNow + Big_Hexagon_x[m]*i;
cand_y = iYMinNow + Big_Hexagon_y[m]*i;
SEARCH_ONE_PIXEL1(1)
}
if (iAbort)
{
//early termination algrithm, refer to JVT-D016
EARLY_TERMINATION
}
} // 六边形模板反复搜索(也可以用大菱形代替),搜索完后进入第三步骤
sec_step: //Extended Hexagon-based Search 满意
iXMinNow = best_x;
iYMinNow = best_y;
for(i=0;i<search_range;i++)
{
iAbort = 1;
for (m = 0; m < 6; m++)
{
cand_x = iXMinNow + Hexagon_x[m];
cand_y = iYMinNow + Hexagon_y[m];
SEARCH_ONE_PIXEL1(0)
}
if(iAbort)
break;
iXMinNow = best_x;
iYMinNow = best_y;
}
// 小菱形模板反复搜索,得到最终的运动矢量
third_step: // the third step with a small search pattern 很满意
iXMinNow = best_x;
iYMinNow = best_y;
for(i=0;i<search_range;i++)
{
iSADLayer = 65536;
iAbort = 1;
for (m = 0; m < 4; m++)
{
cand_x = iXMinNow + Diamond_x[m];
cand_y = iYMinNow + Diamond_y[m];
SEARCH_ONE_PIXEL1(0)
}
if(iAbort)
break;
iXMinNow = best_x;
iYMinNow = best_y;
} *mv_x = best_x - pic_pix_x;
*mv_y = best_y - pic_pix_y;
return min_mcost;
}
UMHexagonS搜索过程的更多相关文章
- 理解Lucene索引与搜索过程中的核心类
理解索引过程中的核心类 执行简单索引的时候需要用的类有: IndexWriter.Directory.Analyzer.Document.Field 1.IndexWriter IndexWr ...
- Lucene学习笔记: 五,Lucene搜索过程解析
一.Lucene搜索过程总论 搜索的过程总的来说就是将词典及倒排表信息从索引中读出来,根据用户输入的查询语句合并倒排表,得到结果文档集并对文档进行打分的过程. 其可用如下图示: 总共包括以下几个过程: ...
- Lucene学习总结之七:Lucene搜索过程解析
一.Lucene搜索过程总论 搜索的过程总的来说就是将词典及倒排表信息从索引中读出来,根据用户输入的查询语句合并倒排表,得到结果文档集并对文档进行打分的过程. 其可用如下图示: 总共包括以下几个过程: ...
- Lucene学习总结之七:Lucene搜索过程解析 2014-06-25 14:23 863人阅读 评论(1) 收藏
一.Lucene搜索过程总论 搜索的过程总的来说就是将词典及倒排表信息从索引中读出来,根据用户输入的查询语句合并倒排表,得到结果文档集并对文档进行打分的过程. 其可用如下图示: 总共包括以下几个过程: ...
- 【elasticsearch】搜索过程详解
elasticsearch 搜索过程详解 本文基于elasticsearch8.1.在es搜索中,经常会使用索引+星号,采用时间戳来进行搜索,比如aaaa-*在es中是怎么处理这类请求的呢?是对匹配的 ...
- ElasticSearch+Springboot实际应用:索引同步建设,搜索过程
1.介绍 springboot框架,众多自动化的部署和约定配置,造成了springboot的着手麻烦,熟练后可以快速快捷进行开发,常用作快捷开发的java底层框架.各位看官都是大神,自行体会. ...
- ElasticSearch 基本介绍和读写搜索过程
cluster 代表一个集群,集群中有多个节点,其中有一个为主节点,这个主节点是可以通过选举产生的,主从节点是对于集群内部来说的.es的一个概念就是去中心化,字面上理解就是无中心节点,这是对于集群外部 ...
- 动态链接--so的搜索过程
可执行文件所依赖的so路径保存在.dynamic 里面,由DT_NEED类型表示.如下: 如果DT_NEED里面保存的是绝对路径,那ld就在绝对路径下查找so. 如果DT_NEED里面保存的是相对路径 ...
- EPZS搜索过程
EPZS(Enhance Predictive Zonal Search) 增强预测区域搜索,是一种整像素运动估计的搜索算法. EPZS采用的是相关性较高的预测方法.这里的相关性较高是指,更多地根据已 ...
随机推荐
- 谈一下spring 的理解
spring,大家基本都在使用,两个核心: 声明式事务AOP : 控制反转依赖注入IOC: 以前对控制反转和依赖注入很模糊,现在大概理解了意思,控制反转,有spring容易来控制bean 的创建,我们 ...
- 如何把textfield或者textview中长按出现的(全选,复制,粘贴)显示成中文
ios在配置文件info.plist 中添加Localiztion native development region (本地化设置) 设置为 china
- 狗血phonegap备忘录[3.3]
phonegap平台就是个狗血的坑,最近的一个项目技术因为上面选型失败,使用了phonegap,加上客户的要求是"像微信一样",真可谓历经坎坷. 基本上评估一个项目是否应该或者可以 ...
- 【转】四种常见的POST提交数据方式
HTTP/1.1 协议规定的 HTTP 请求方法有 OPTIONS.GET.HEAD.POST.PUT.DELETE.TRACE.CONNECT 这几种.其中 POST 一般用来向服务端提交数据,本文 ...
- Monkeyrunner入门示例
准备工作1.安装Android SDK2.熟悉MonkeyRunner的API(http://article.yeeyan.org/view/37503/164523)3.一部Android手机或模拟 ...
- [PWA] 13. New db and object store
Create a db: import idb from 'idb'; var dbPromise = idb.open('test-db', 2, function (upgradeDb) { sw ...
- 如何使用Valgrind memcheck工具进行C/C++的内存泄漏检测
系统编程中一个重要的方面就是有效地处理与内存相关的问题.你的工作越接近系统,你就需要面对越多的内存问题.有时这些问题非常琐碎,而更多时候它会演变成一个调试内存问题的恶梦.所以,在实践中会用到很多工 ...
- RabbitMQ Management HTTP API--官方文档
Introduction Apart from this help page, all URIs will serve only resources of type application/json, ...
- 给iOS开发者的GCD用户手册
Grand Central Dispatch,或者GCD,是一个极其强大的工具.它给你一些底层的组件,像队列和信号量,让你可以通过一些有趣的方式来获得有用的多线程效果.可惜的是,这个基于C的API是一 ...
- ubuntu 连接 mssql <转>
转自 http://www.sendong.net/thread-90941-1-1.html 在linux下连接MSSQL,因为微软同志没有提供任何接口给开发人员,大约他们认为要用MSSQL的,只 ...