第三期 行为规划——4.形式化FSM
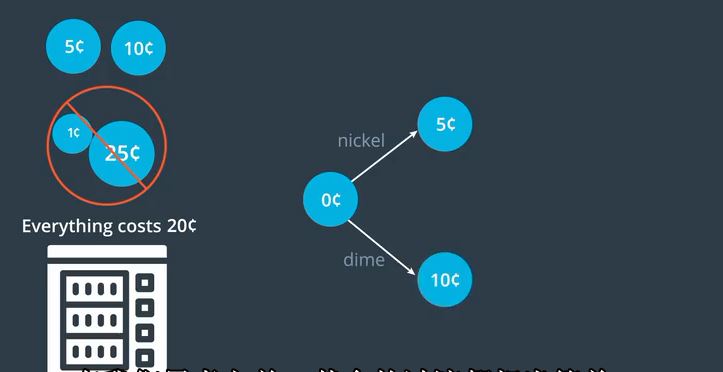
让我们考虑一个简单的自动售货机,其中一切花费20美分。假设这台自动售货机只需要镍和硬币,但没有更大或更小。
然后,我们可以模拟状态这台自动售货机以已存入的金额为准。起始状态将为零美分。有两种可能发生。
我们可以投入镍,五美分或可以投入一美元,以使状态达到10美分。
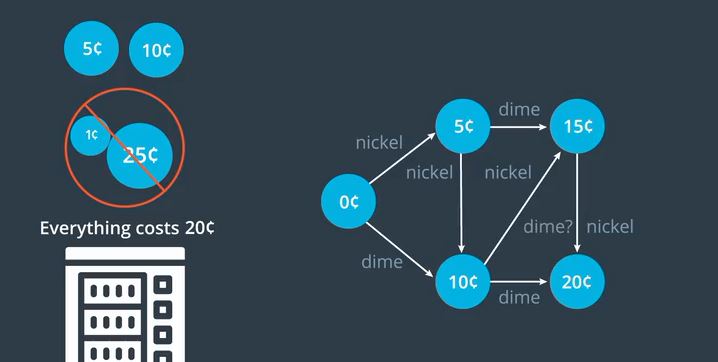
在我们思考之前,其余的过渡都相当简单。如果我们处于15美分的状态并且有人投入一毛钱该怎么办。
我们可以把它算为20。但让我们说,这台机器需要确切的变化,以便一角钱就会落下来,从机器底部的小托盘中取出。
正如你所看到的,有限状态机在概念上非常简单。那么为什么要谈论他们呢?
他们有自己的长处和短处。让我们从我们的优势开始。
首先,有限状态机很容易推理。他们基本上是自我记录,因为他们映射系统的逻辑状态直接指向物理状态。
当镍进入自动售货机时状态改变为比当前状态大5美分的状态。
接下来,它们是可维护的。如果我们想调整这台机器,那么一切都会花费
如果只增加一个状态,那么四分之一的事情就会变得很微不足道。
这给我们带来了有限状态机的弱点。主要的一点是他们很容易被滥用。
如果他们没有很好地设计开始或如果问题,我们只需添加另一个状态,这可能会导致一些草率的代码和不稳定的逻辑。
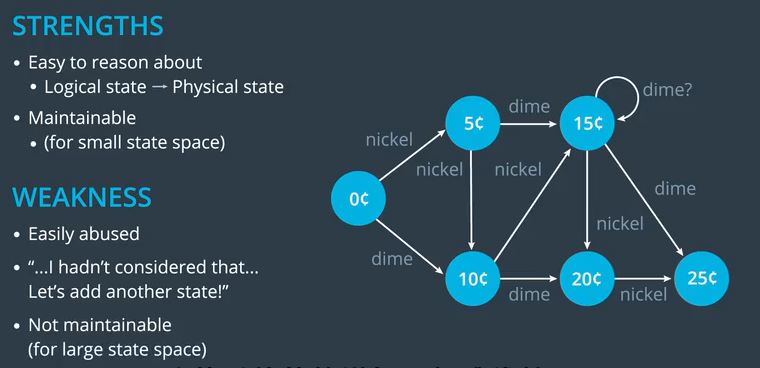
实际上这意味着有限状态机可以随着州基数的增加,很难维持。
第三期 行为规划——4.形式化FSM的更多相关文章
- 第三期 行为规划——10.用C++实现变道函数
在之前的测验中,我们设计了一个成本函数,高速公路上到达一个目标选择一条车道. 公式中,Δd是车道间的纵向距离,Δs是车辆到目标之间的距离. 在这个测验中,需要用c++实现代价函数,但是这里有一个变换, ...
- 第三期 行为规划——11.在C ++中实现第二个成本函数
在大多数情况下,单一成本函数不足以产生复杂的车辆行为.在这个测验中,我们希望您在C ++中实现更多的成本函数.我们稍后会在本课中使用这两个C ++成本函数.这个测验的目标是创建一个成本函数,使车辆在最 ...
- 第三期 第三期 搜索——1.运动规划(motion_planing)
运动规划的根本问题在于机器人可能存在于一个这样的世界中, 它可能想找到一条到达这个目标的路径,那么就需要指定一个到达那里的计划, 自动驾驶汽车也会遇到这个问题.他可能处于高速公路的附近的街道网络中,他 ...
- POJ 2728 Desert King ★(01分数规划介绍 && 应用の最优比率生成树)
[题意]每条路径有一个 cost 和 dist,求图中 sigma(cost) / sigma(dist) 最小的生成树. 标准的最优比率生成树,楼教主当年开场随手1YES然后把别人带错方向的题Orz ...
- cocos2d-x 游戏开发之有限状态机(FSM) (一)
cocos2d-x 游戏开发之有限状态机(FSM) (一) 参考:http://blog.csdn.net/mgphuang/article/details/5845252<Cocos2d-x游 ...
- [bzoj1486][HNOI2009]最小圈——分数规划+spfa+负环
题目 传送门 题解 这个题是一个经典的分数规划问题. 把题目形式化地表示,就是 \[Minimize\ \lambda = \frac{\sum W_{i, i+1}}{k}\] 整理一下,就是 \[ ...
- RChain的一键形式化验证:关于RCast 33 – LADL话题的讨论摘要
作者/Atticbee 在这一集,Greg和RChain的研究人员Isaac,Christian讨论了TLA(Temporal Logic of Actions)和RChain的LADL(Logic ...
- es技术规划
一.业务背景 es服务当前没有专门的部门负责维护和开发,交由各端自行负责维护,随着公司业务查询和统计需求非常多,会面临居多方面问题和挑战: 无人(专业RD或部门)负责 无专业的人进行维护,遇到问题几乎 ...
- 【课程汇总】OpenHarmony 成长计划知识赋能第三期系列课程(附链接)
OpenHarmony 开源开发者成长计划第三期知识赋能课程硬核程度再次升级,带领开发者上手 OpenHarmony 的标准系统应用开发,学习标准设备应用开发,使用 eTS UI 开发分布式应用样例, ...
随机推荐
- Linux远程管理Windows程序Rdesktop详解
#rpm –q rdesktop //查找是否已经安装 #yum install rdesktop //使用yum安装 rde ...
- ue4同c#通信时的中文乱码问题
转:https://blog.csdn.net/XIAOZHI0999/article/details/80785570 本文讨论C#同ue4进行通信,出现的中文乱码情况,其他语言类似. 本文分两种情 ...
- Vue2.0史上最全入坑教程(中)—— 脚手架代码详解
书接上文我们说道,如何利用脚手架(vue-cli)构建一个vue项目,本回书我们一起来学习分析下代码. 回顾下创建后的项目目录: 说明:在*.vue文件,template标签里写html代码,且t ...
- 提交方式get和post有什么区别
提交方式post和get有什么区别? (1)post是向服务器传送数据:get是从服务器上获取数据. (2)在客户端,get是把参数数据队列加到提交表单的ACTION属性所指的URL中,值和表单内各个 ...
- 使用pip安装pymysql
本人使用的python版本是3.6,该版本是自带有pip.可以直接通过pip工具进行安装pymysql: 第一步:找到pip.exe路径. 例如我安装的目录如下,自带的pip工具的python版本,在 ...
- 【python小随笔】Django+错误日志(配置Django报错文件指定位置)
1: 自定义日志文件.py----------几个文件需要创建日志,就需要重新定义几份 # 定义一个日志文件 创建一个操作日志对象logger file_1 = logging.FileHandle ...
- 2017年浙工大迎新赛热身赛 L cayun日常之赏月【易错特判】
题目描述(https://www.nowcoder.com/acm/contest/51#question) 在cayun星球月亮大小都有一个规律,月亮为每30天一个周期,在这30天的周期里,月亮的大 ...
- Linux 上GCC的静态编译和动态编译
静态编译 常规编译示例: $gcc xxx.c yyy.c zzz.c -o rslt 注明: gcc编译器会对源文件min.c进行预处理, 编译, 以及链接, 最后生成可执行文件 $gcc -c x ...
- Leetcode874.Walking Robot Simulation模拟行走的机器人
机器人在一个无限大小的网格上行走,从点 (0, 0) 处开始出发,面向北方.该机器人可以接收以下三种类型的命令: -2:向左转 90 度 -1:向右转 90 度 1 <= x <= 9:向 ...
- 深入浅出Cocoa之类与对象【转】
最近打算写一些ObjC中比较底层的东西,尤其是 runtime 相关的.苹果已经将 ObjC runtime 代码开源了,我们可以从:http://opensource.apple.com/sourc ...