opencv —— threshold、adaptiveThreshold 固定阈值 & 自适应阈值 进行图像二值化处理
阈值化
在对图像进行处理操作的过程中,我们常常需要对图像中的像素做出取舍与决策,直接剔除一些低于或高于一定值的像素。
阈值分割可以视为最简单的图像分割方法。比如基于图像中物体与背景之间的灰度差异,可以利用阈值分割出我们需要的物体。这种分割是像素级的分割,为了从一幅图像中提取我们需要的部分,应该用图像中的每个像素点的灰度值与选择的阈值进行比较,并作出取舍判断。
注意,阈值的选取依赖于具体问题,物体在不同的图片中可能会有不同的灰度值。一旦找到了需要分割的物体的像素点,可以对这些像素点设定一些特定的值来表示。例如可以将物体的像素点的灰度值设定为”0“(黑色),其他像素点的灰度值设为”255“(白色)。
OpenCV 中 threshold() 函数(固定阈值操作)和 adaptiveThreshold() 函数(自适应阈值操作)可以满足这样的需求。它们的基本思想是:给定一个数组和一个阈值,根据数组中的每个元素的值是高于还是低于阈值而进行一些操作。
固定阈值操作:threshold 函数
threshold() 函数是对单通道数组应用固定阈值操作。该函数的典型应用是对灰度图像进行阈值操作得到二值图像(compare 函数也可以达到此目的),或者去除噪声,过滤掉像素值很小或很大的图像点。
double threshold(InputArray src, OutputArray dst, double thresh, double maxval, int type);
- src,输入数组,填单通道、8 或 32 位浮点类型的 Mat 类型对象即可。
- dst,输出数组,和第一个参数中的 Mat 变量有一样的尺寸和类型。
- thresh,阈值的具体值。
- maxval,输出像素值的上限,仅当第五个参数阈值类型 type 取 THRESH_BINARY 或 THRESH_BINARY_INV 时会用到。
- type,阈值类型。
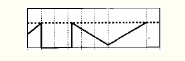
折线为将被阈值化的值,虚线为阈值
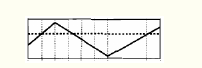
THRESH_BINARY:大于阈值的部分被置为 maxval,小于部分被置为 0
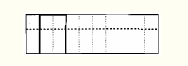
THRESH_BINARY_INV:大于阈值部分被置为 0,小于部分被置为 maxval
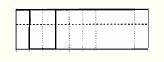
THRESH_TRUNC:大于阈值部分被置为 thresh,小于部分保持原样
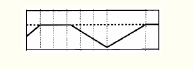
THRESH_TOZERO:小于阈值部分被置为 0,大于部分保持不变
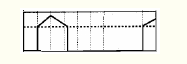
THRESH_TOZERO_INV:大于阈值部分被置为 0,小于部分保持不变
THRESH_BINARY|THRESH_OTSU:使用最大类间差分法(THRESH_OTSU)获取阈值,然后再用该阈值进行二分,二分方法是上面 5 种选择。
THRESH_BINARY|THRESH_TRIANGLE:使用三角法获取阈值,然后再用该阈值进行二分,二分方法是上面 5 种选择。
- 返回值为 thresh
自适应阈值操作:adaptiveThreshold 函数
前面看到简单阈值是一种全局性的阈值,只需要规定一个阈值的值,整个图像都和这个阈值比较。而自适应阈值可以看成一种局部性的阈值,通过规定一个区域大小,比较这个点与区域大小里面像素点的平均值(或者其他特征)的大小关系确定这个像素点是属于黑或者白(如果是二值情况)。
double adaptiveThreshold (InputArray src, OutputArray dst, double maxVal, int adaptiveMethod, int thresholdType, int blockSize, double C);
- src,输入数组,Mat 类的对象即可,但需要为 8 位单通道浮点型图像。
- dst,输出数组,和第一个参数中的 Mat 变量有一样的尺寸和类型。
- maxVal,输出像素值的上限。
- adaptiveMethod,用于指定要使用的自适应阈值算法。阈值有两种取值:
ADAPTIVE_THRESH_MEAN_C :领域内均值
ADAPTIVE_THRESH_GAUSSIAN_C :领域内像素点加权和,权重为一个高斯窗口。
- thresholdType,阈值类型。取值必须为 THRESH_BINARY 或 THRESH_BINARY_INV。
- blockSize,用于计算阈值大小的一个像素的邻域尺寸,取值为 3、5、7。
- C,阈值 = 平均或加权平均值 - C。为0相当于阈值 就是求得领域内均值或者加权值。
代码示例:
#include <opencv.hpp>
using namespace cv;
int main() {
Mat src = imread("C:/Users/齐明洋/Desktop/证件照/7.jpg", );
imshow("src", src); Mat dst;
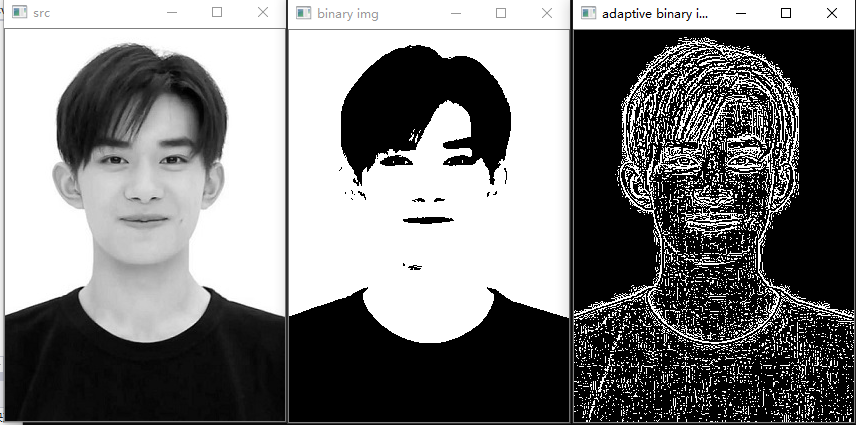
threshold(src, dst, , , THRESH_BINARY);
imshow("binary img", dst); adaptiveThreshold(src, dst, , ADAPTIVE_THRESH_GAUSSIAN_C, THRESH_BINARY, , );
imshow("adaptive binary img", dst); waitKey();
}
效果展示:
借鉴博客:https://blog.csdn.net/qq_37385726/article/details/82015545
https://www.cnblogs.com/yinliang-liang/p/9293310.html
------------恢复内容开始------------
阈值化
在对图像进行处理操作的过程中,我们常常需要对图像中的像素做出取舍与决策,直接剔除一些低于或高于一定值的像素。
阈值分割可以视为最简单的图像分割方法。比如基于图像中物体与背景之间的灰度差异,可以利用阈值分割出我们需要的物体。这种分割是像素级的分割,为了从一幅图像中提取我们需要的部分,应该用图像中的每个像素点的灰度值与选择的阈值进行比较,并作出取舍判断。
注意,阈值的选取依赖于具体问题,物体在不同的图片中可能会有不同的灰度值。一旦找到了需要分割的物体的像素点,可以对这些像素点设定一些特定的值来表示。例如可以将物体的像素点的灰度值设定为”0“(黑色),其他像素点的灰度值设为”255“(白色)。
OpenCV 中 threshold() 函数(固定阈值操作)和 adaptiveThreshold() 函数(自适应阈值操作)可以满足这样的需求。它们的基本思想是:给定一个数组和一个阈值,根据数组中的每个元素的值是高于还是低于阈值而进行一些操作。
固定阈值操作:threshold 函数
threshold() 函数是对单通道数组应用固定阈值操作。该函数的典型应用是对灰度图像进行阈值操作得到二值图像(compare 函数也可以达到此目的),或者去除噪声,过滤掉像素值很小或很大的图像点。
double threshold(InputArray src, OutputArray dst, double thresh, double maxval, int type);
- src,输入数组,填单通道、8 或 32 位浮点类型的 Mat 类型对象即可。
- dst,输出数组,和第一个参数中的 Mat 变量有一样的尺寸和类型。
- thresh,阈值的具体值。
- maxval,输出像素值的上限,仅当第五个参数阈值类型 type 取 THRESH_BINARY 或 THRESH_BINARY_INV 时会用到。
- type,阈值类型。
折线为将被阈值化的值,虚线为阈值
THRESH_BINARY:大于阈值的部分被置为 maxval,小于部分被置为 0
THRESH_BINARY_INV:大于阈值部分被置为 0,小于部分被置为 maxval
THRESH_TRUNC:大于阈值部分被置为 thresh,小于部分保持原样
THRESH_TOZERO:小于阈值部分被置为 0,大于部分保持不变
THRESH_TOZERO_INV:大于阈值部分被置为 0,小于部分保持不变
THRESH_BINARY | THRESH_OTSU:使用最大类间差分法(THRESH_OTSU)获取阈值,然后再用该阈值进行二分,二分方法是 | 左边方法。
THRESH_BINARY_INV | THRESH_TRIANGLE:使用三角法获取阈值,然后再用该阈值进行二分,二分方法是 | 左边方法。
自适应阈值操作:adaptiveThreshold 函数
前面看到简单阈值是一种全局性的阈值,只需要规定一个阈值的值,整个图像都和这个阈值比较。而自适应阈值可以看成一种局部性的阈值,通过规定一个区域大小,比较这个点与区域大小里面像素点的平均值(或者其他特征)的大小关系确定这个像素点是属于黑或者白(如果是二值情况)。
double adaptiveThreshold (InputArray src, OutputArray dst, double maxVal, int adaptiveMethod, int thresholdType, int blockSize, double C);
- src,输入数组,Mat 类的对象即可,但需要为 8 位单通道浮点型图像。
- dst,输出数组,和第一个参数中的 Mat 变量有一样的尺寸和类型。
- maxVal,输出像素值的上限。
- adaptiveMethod,用于指定要使用的自适应阈值算法。阈值有两种取值:
ADAPTIVE_THRESH_MEAN_C :领域内均值
ADAPTIVE_THRESH_GAUSSIAN_C :领域内像素点加权和,权重为一个高斯窗口。
- thresholdType,阈值类型。取值必须为 THRESH_BINARY 或 THRESH_BINARY_INV。
- blockSize,用于计算阈值大小的一个像素的邻域尺寸,取值为 3、5、7。
- C,阈值 = 平均或加权平均值 - C。为0相当于阈值 就是求得领域内均值或者加权值。
代码示例:
#include <opencv.hpp>
using namespace cv;
int main() {
Mat src = imread("C:/Users/齐明洋/Desktop/证件照/7.jpg", );
imshow("src", src); Mat dst;
threshold(src, dst, , , THRESH_BINARY);
imshow("binary img", dst); adaptiveThreshold(src, dst, , ADAPTIVE_THRESH_GAUSSIAN_C, THRESH_BINARY, , );
imshow("adaptive binary img", dst); waitKey();
}
效果展示:
借鉴博客:https://blog.csdn.net/qq_37385726/article/details/82015545
https://www.cnblogs.com/yinliang-liang/p/9293310.html
------------恢复内容开始------------
阈值化
在对图像进行处理操作的过程中,我们常常需要对图像中的像素做出取舍与决策,直接剔除一些低于或高于一定值的像素。
阈值分割可以视为最简单的图像分割方法。比如基于图像中物体与背景之间的灰度差异,可以利用阈值分割出我们需要的物体。这种分割是像素级的分割,为了从一幅图像中提取我们需要的部分,应该用图像中的每个像素点的灰度值与选择的阈值进行比较,并作出取舍判断。
注意,阈值的选取依赖于具体问题,物体在不同的图片中可能会有不同的灰度值。一旦找到了需要分割的物体的像素点,可以对这些像素点设定一些特定的值来表示。例如可以将物体的像素点的灰度值设定为”0“(黑色),其他像素点的灰度值设为”255“(白色)。
OpenCV 中 threshold() 函数(固定阈值操作)和 adaptiveThreshold() 函数(自适应阈值操作)可以满足这样的需求。它们的基本思想是:给定一个数组和一个阈值,根据数组中的每个元素的值是高于还是低于阈值而进行一些操作。
固定阈值操作:threshold 函数
threshold() 函数是对单通道数组应用固定阈值操作。该函数的典型应用是对灰度图像进行阈值操作得到二值图像(compare 函数也可以达到此目的),或者去除噪声,过滤掉像素值很小或很大的图像点。
double threshold(InputArray src, OutputArray dst, double thresh, double maxval, int type);
- src,输入数组,填单通道、8 或 32 位浮点类型的 Mat 类型对象即可。
- dst,输出数组,和第一个参数中的 Mat 变量有一样的尺寸和类型。
- thresh,阈值的具体值。
- maxval,输出像素值的上限,仅当第五个参数阈值类型 type 取 THRESH_BINARY 或 THRESH_BINARY_INV 时会用到。
- type,阈值类型。
折线为将被阈值化的值,虚线为阈值
THRESH_BINARY:大于阈值的部分被置为 maxval,小于部分被置为 0
THRESH_BINARY_INV:大于阈值部分被置为 0,小于部分被置为 maxval
THRESH_TRUNC:大于阈值部分被置为 thresh,小于部分保持原样
THRESH_TOZERO:小于阈值部分被置为 0,大于部分保持不变
THRESH_TOZERO_INV:大于阈值部分被置为 0,小于部分保持不变
THRESH_BINARY | THRESH_OTSU:使用最大类间差分法(THRESH_OTSU)获取阈值,然后再用该阈值进行二分,二分方法是 | 左边方法。
THRESH_BINARY_INV | THRESH_TRIANGLE:使用三角法获取阈值,然后再用该阈值进行二分,二分方法是 | 左边方法。
自适应阈值操作:adaptiveThreshold 函数
前面看到简单阈值是一种全局性的阈值,只需要规定一个阈值的值,整个图像都和这个阈值比较。而自适应阈值可以看成一种局部性的阈值,通过规定一个区域大小,比较这个点与区域大小里面像素点的平均值(或者其他特征)的大小关系确定这个像素点是属于黑或者白(如果是二值情况)。
double adaptiveThreshold (InputArray src, OutputArray dst, double maxVal, int adaptiveMethod, int thresholdType, int blockSize, double C);
- src,输入数组,Mat 类的对象即可,但需要为 8 位单通道浮点型图像。
- dst,输出数组,和第一个参数中的 Mat 变量有一样的尺寸和类型。
- maxVal,输出像素值的上限。
- adaptiveMethod,用于指定要使用的自适应阈值算法。阈值有两种取值:
ADAPTIVE_THRESH_MEAN_C :领域内均值
ADAPTIVE_THRESH_GAUSSIAN_C :领域内像素点加权和,权重为一个高斯窗口。
- thresholdType,阈值类型。取值必须为 THRESH_BINARY 或 THRESH_BINARY_INV。
- blockSize,用于计算阈值大小的一个像素的邻域尺寸,取值为 3、5、7。
- C,阈值 = 平均或加权平均值 - C。为0相当于阈值 就是求得领域内均值或者加权值。
代码示例:
#include <opencv.hpp>
using namespace cv;
int main() {
Mat src = imread("C:/Users/齐明洋/Desktop/证件照/7.jpg", );
imshow("src", src); Mat dst;
threshold(src, dst, , , THRESH_BINARY);
imshow("binary img", dst); adaptiveThreshold(src, dst, , ADAPTIVE_THRESH_GAUSSIAN_C, THRESH_BINARY, , );
imshow("adaptive binary img", dst); waitKey();
}
效果展示:
借鉴博客:https://blog.csdn.net/qq_37385726/article/details/82015545
https://www.cnblogs.com/yinliang-liang/p/9293310.html
------------恢复内容结束------------
------------恢复内容结束------------
opencv —— threshold、adaptiveThreshold 固定阈值 & 自适应阈值 进行图像二值化处理的更多相关文章
- OpenCV_基于局部自适应阈值的图像二值化
在图像处理应用中二值化操作是一个很常用的处理方式,例如零器件图片的处理.文本图片和验证码图片中字符的提取.车牌识别中的字符分割,以及视频图像中的运动目标检测中的前景分割,等等. 较为常用的图像二值化方 ...
- [python-opencv]图像二值化【图像阈值】
图像二值化[图像阈值]简介: 如果灰度图像的像素值大于阈值,则为其分配一个值(可以是白色255),否则为其分配另一个值(可以是黑色0) 图像二值化就是将灰度图像上的像素值设置为0或255,也就是将整个 ...
- Python+OpenCV图像处理(十)—— 图像二值化
简介:图像二值化就是将图像上的像素点的灰度值设置为0或255,也就是将整个图像呈现出明显的黑白效果的过程. 一.普通图像二值化 代码如下: import cv2 as cv import numpy ...
- python-opencv 图像二值化,自适应阈值处理
定义:图像的二值化,就是将图像上的像素点的灰度值设置为0或255,也就是将整个图像呈现出明显的只有黑和白的视觉效果. 一幅图像包括目标物体.背景还有噪声,要想从多值的数字图像中直接提取出目标物体,常用 ...
- opencv python 图像二值化/简单阈值化/大津阈值法
pip install matplotlib 1简单的阈值化 cv2.threshold第一个参数是源图像,它应该是灰度图像. 第二个参数是用于对像素值进行分类的阈值, 第三个参数是maxVal,它表 ...
- opencv图像二值化的函数cvThreshold()。 cvAdaptiveThreshol
OpenCV中对图像进行二值化的关键函数——cvThreshold(). 函数功能:采用Canny方法对图像进行边缘检测 函数原型: void cvThreshold( const CvArr* sr ...
- 10、OpenCV Python 图像二值化
__author__ = "WSX" import cv2 as cv import numpy as np #-----------二值化(黑0和白 255)---------- ...
- opencv python:图像二值化
import cv2 as cv import numpy as np import matplotlib.pyplot as plt # 二值图像就是将灰度图转化成黑白图,没有灰,在一个值之前为黑, ...
- opencv-python图像二值化函数cv2.threshold函数详解及参数cv2.THRESH_OTSU使用
cv2.threshold()函数的作用是将一幅灰度图二值化,基本用法如下: #ret:暂时就认为是设定的thresh阈值,mask:二值化的图像 ret,mask = cv2.threshold(i ...
随机推荐
- Bootstrap自带的那些常用插件
1.Bootstrap自带的那些常用插件. 1.1模态框 模态框的HTML代码放置的位置 务必将模态框的HTML代码放在文档的最高层级内(也就是说,尽量作为 body 标签的直接子元素),以避免其他组 ...
- Docker和Kubernetes
Docker和Kubernetes Docker Docker是一个容器的开放平台,但它不是最早的.自20世纪70年代以来,容器平台一直存在.他们的开发可以追溯到Unix中的chroot系统调用.在2 ...
- HanLP《自然语言处理入门》笔记--3.二元语法与中文分词
笔记转载于GitHub项目:https://github.com/NLP-LOVE/Introduction-NLP 3. 二元语法与中文分词 上一章中我们实现了块儿不准的词典分词,词典分词无法消歧. ...
- SpringCloud与微服务Ⅳ --- Rest微服务构建案例工程模块
一.父工程搭建 父工程pom: <?xml version="1.0" encoding="UTF-8"?> <project xmlns=& ...
- 使用Gradle构建springboot多模块项目,并混合groovy开发
idea设置本地gradle 打包: build.gradle //声明gradle脚本自身需要使用的资源,优先执行 buildscript { ext { springBootVersion = ' ...
- screen配置窗口显示
screen的下方不显示,可以复制如下的代码 cd /root && vim .screenrc 贴上如下内容 hardstatus on hardstatus alwayslastl ...
- 如何优雅地打印一个Java对象?
你好呀,我是沉默王二,一个和黄家驹一样身高,和刘德华一样颜值的程序员.虽然已经写了十多年的 Java 代码,但仍然觉得自己是个菜鸟(请允许我惭愧一下). 在一个月黑风高的夜晚,我思前想后,觉得再也不能 ...
- 曹工说Spring Boot源码(15)-- Spring从xml文件里到底得到了什么(context:load-time-weaver 完整解析)
写在前面的话 相关背景及资源: 曹工说Spring Boot源码(1)-- Bean Definition到底是什么,附spring思维导图分享 曹工说Spring Boot源码(2)-- Bean ...
- 精心整理「服务器Linux C/C++」 成长路程(附思维导图)
前言 我不是名校毕业,更没有大厂的背景,我只是一个毕业不到 2 年的普普通通的程序员,在摸爬滚打的工作这段时间里,深知了有一个「完整的知识体系」是非常重要的.当事人非常后悔没有在大学期间知道这个道理- ...
- 《Android Studio实战 快速、高效地构建Android应用》--四、Git入门
Git版本控制系统(VCS)是分布式的,仓库的每一个副本均包含项目的完整历史 安装Git 下载 下载地址:http://git-scm.com/downloads 选择适合自己操作系统的来下载 如果下 ...