UE4物理模块(二)---建立物体碰撞
在前文中介绍了什么是物理以及如何在UE4和PhysX中进行可视化调试:
Jerry:UE4物理模块(一)---概述与可视化调试zhuanlan.zhihu.com
这里调试只谈到了碰撞盒(后续还会有场景查询等调试介绍),那么如何创建物体的碰撞盒呢?
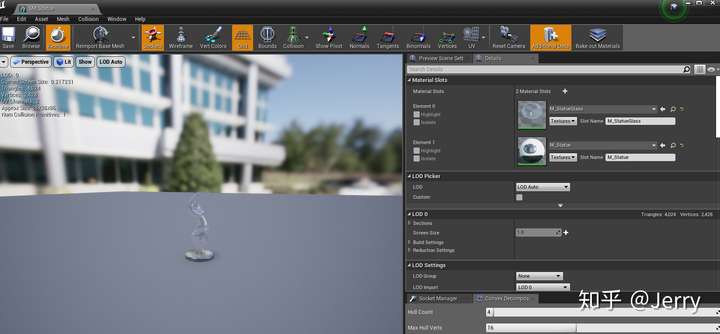
碰撞既可以在3D Max中创建成.fbx文件然后导入UE4,也可以用UE4内建的模型工具进行生成。我们以示例场景中摆在桌上的雕塑为例,选中后,双击右侧Static Mesh图片就可以打开模型编辑器了,如下图:

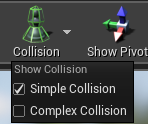
在上面工具栏里面有一个Collision,单击后可以看到可选显示简单碰撞与复杂碰撞:
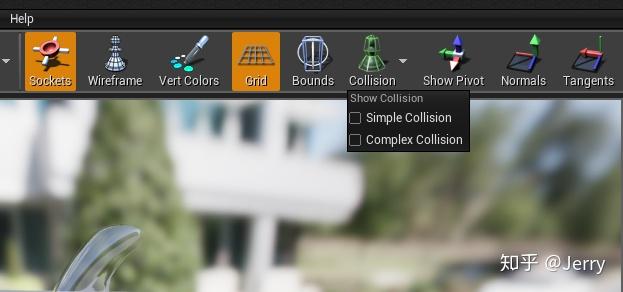
按照PhysX中的定义,物体的碰撞分为简单碰撞与复杂碰撞,复杂碰撞就是拿物体模型面片作为碰撞盒,除此之外的都是简单碰撞。
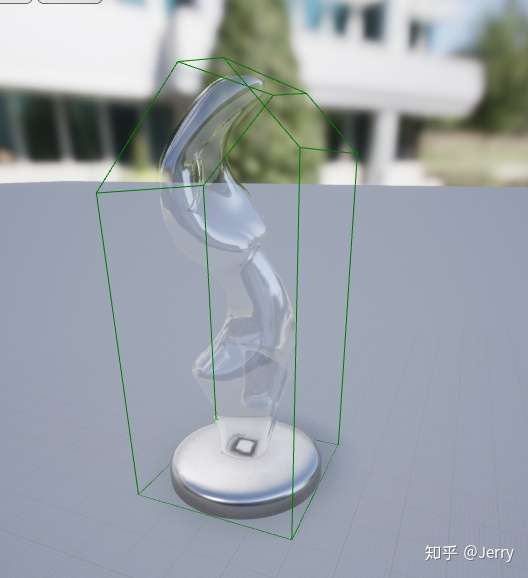
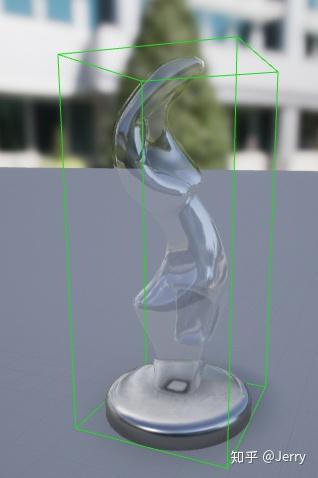
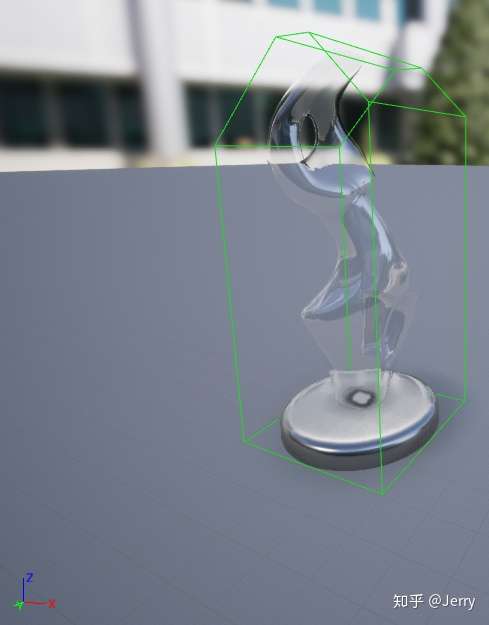
钩选简单碰撞后,可以看到类似于下图(不一定一样,因为我改过了),是比较粗糙的模型轮廓包围盒:
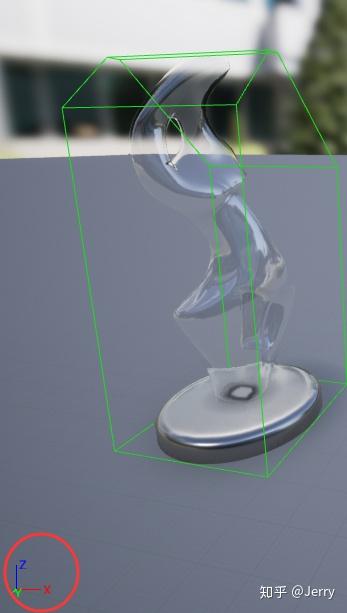
去掉简单碰撞,钩选复杂碰撞,会看下密密麻麻的三角面片,如下图:

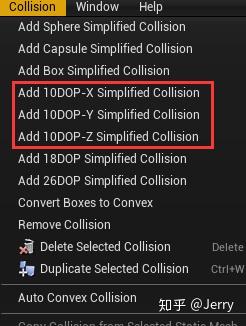
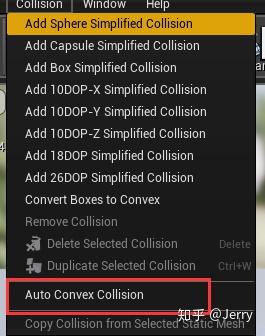
这是物体的精确碰撞,也就是PhyX定义的复杂碰撞。复杂碰撞一般就是物体的模型面片本身,除非模型改变,否则碰撞就是这样;简单碰撞的花样则比较多,在上面的菜单栏里面有一个“collision”,单击后可见下拉列表如下:
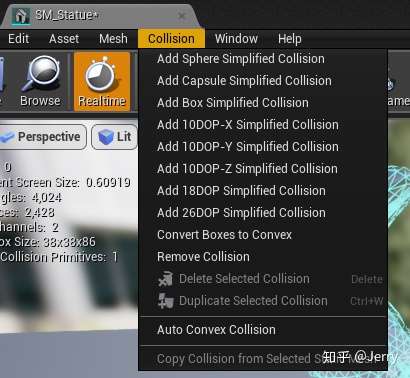
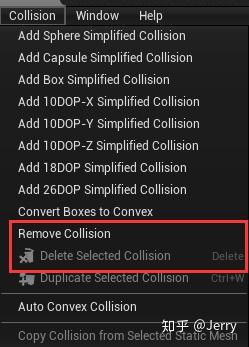
包含有从Add Sphere Simplified Collision到Add 26DOP Simplified Collision共8种预设碰撞,以及可调参数的第9种自动凸包工具(Auto Convex Collision)。我们可以分成三大类,第一类是基本几何体碰撞,包括球碰撞,胶囊碰撞和盒形碰撞;第二类是k-DOP碰撞,在盒形简单碰撞基础上添加更多的轴逼近物体;第三类是自动凸包生成工具,可以调的参数包括生成最多凸包个数(最小是2个),以及每个凸包顶点的最大数量(最小是6个)。下面先来看下基本几何体碰撞。在看之前要将视图切成简单碰撞:
并把之前生成的简单碰撞去掉,选择Remove Collision就可以清掉所有简单碰撞了,也可以先选中某一个碰撞盒,然单击这里的Delete Selected Collision:
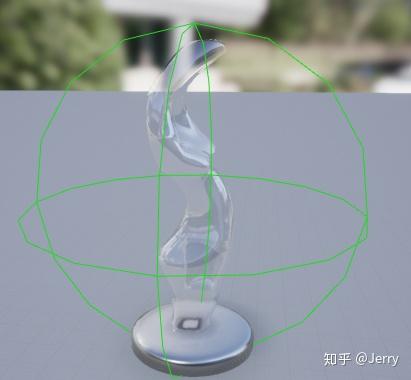
球简单碰撞如下:
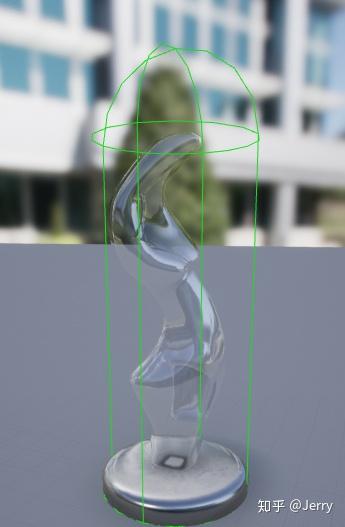
胶囊体简单碰撞如下:
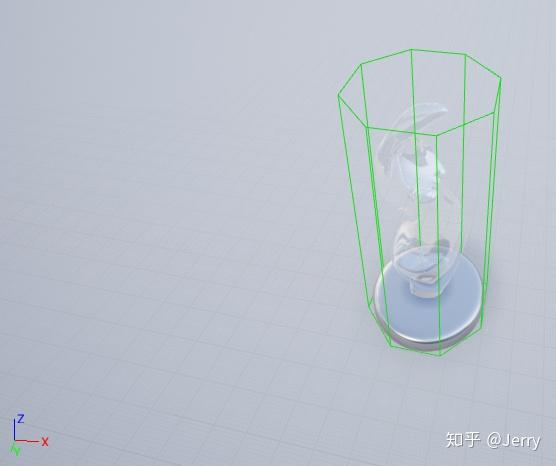
盒形简单碰撞如下:
其中盒形碰撞又可称之为6-DOP碰撞,那么如何理解k-DOP碰撞模型呢?DOP全称是
Discrete Oriented Polytope,即离散有向多面体,k是它的轴数量。以一张2D图像为例:

以轴对齐方式建立包围盒,只需要绿色与橙色四个对齐轴即可(可以将绿轴理解为X轴,将橙轴理解为Y轴),如下图:

这就是4-DOP,想要成3D图片,对齐轴要换成平面,这样就需要多出前后两个面来限制厚度,所以是6-DOP(恰好对应于盒子的六个面)。我们把这种与XYZ轴对齐的划分包围盒称为AABB盒。
回到2D图片上,如果想要更精确呢,可以再加四条线,但这四条线不再与XY轴对齐了,如下图所示:
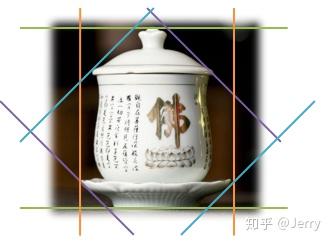
蓝色与紫色是新加的轴,这样截出来的包围盒就更精确了,如下图红色框所示:

总共有8个轴来切出这个包围盒,因此称之为8-DOP,扩展到3D,就是18-DOP(怎么数?可以非平行轴数量,然后乘以2:对于方盒前面和后面来说,是XY两个轴+左斜边一个轴+右斜边一个轴,就是四个轴;对于方盒左面和右面来说,左斜边一个轴+右斜边一个轴,就是两个轴;对于方盒顶面和底面来说,左斜边一个轴+右斜边一个轴,也是两个轴;最后再补上厚度Z轴,就是2(前后斜边)+2(左右斜边)+2(顶底斜边)+3(XYZ)=9,再乘以2考虑到平行轴,就是18个轴了)。
如果分别只考虑某一面的斜边,即2(某一面斜边)+3(XYZ)=5,乘以2得10,就是编辑器里面说的10-DOP的缘由了:
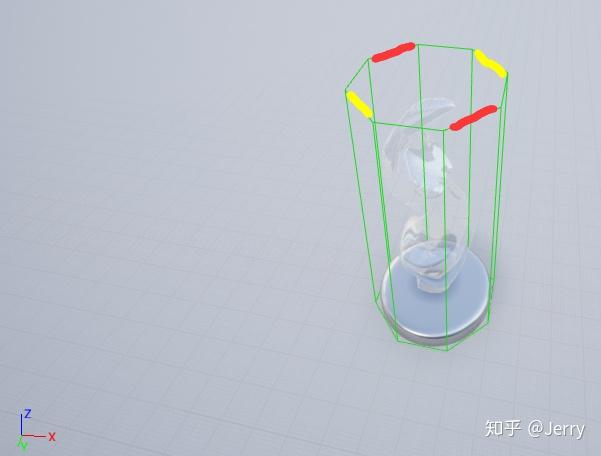
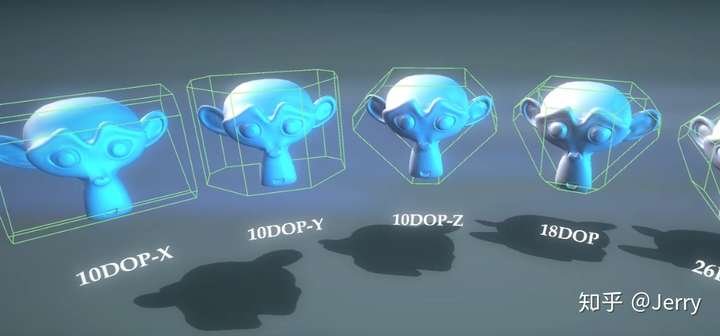
下面截图示意下,10DOP-X情况,我把坐标也标出来了,注意区分:
是垂直于X切的左斜和右斜边,下面是10DOP-Y:
以及10DOP-Z:
为了方便理解,我再把左右斜边也标注下(其实是斜平面):
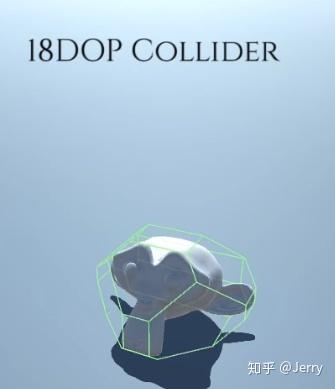
至于18-DOP(每面都有斜边)与26-DOP(除了边还有角也细分),也贴出来示例下:
 18-DOP
18-DOP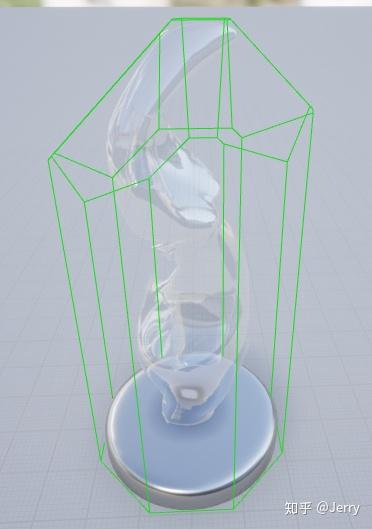 26-DOP
26-DOP
一般来说,做到18-DOP就已经差不多了。
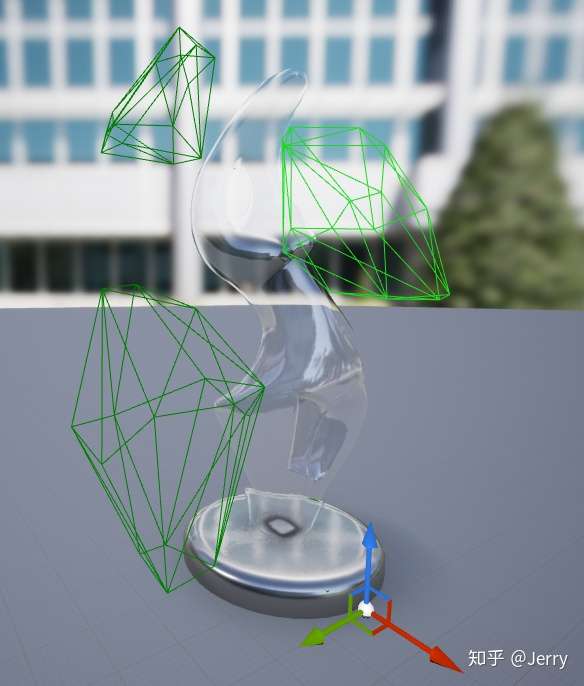
自动凸包工具如下:
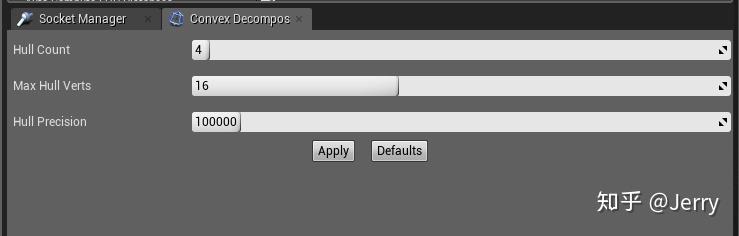
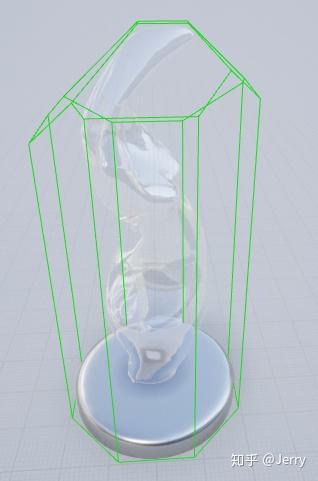
可以改目标凸包个数,以及每个凸包最大顶点数。HullCount表示最多凸包个数,最少是2,MaxHullVerts表示每个凸包最多的顶点个数,最少是6。我们按2和6来自动生成凸包,可见:

注意到底座几乎没有覆盖到碰撞(貌似与凸包算法有关,将凸包数量调大也不能覆盖),上半身覆盖的不完整,这是因为凸包个数不够的原因。我们采用默认的4个凸包和16个顶点数量生成,如下:
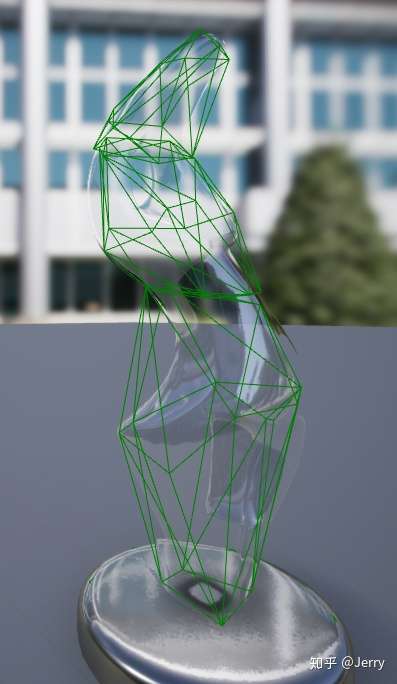
可以看到碰撞的精细度立刻就上来了,生成的凸包是可以用手拖动的,我们将之分离:
可以看到这个自动凸包工具是生成了三个凸包(数字4表示生成凸包个数的上限,不一定会正好生成4个凸包),并且每个凸包的顶点数量不会超过16。
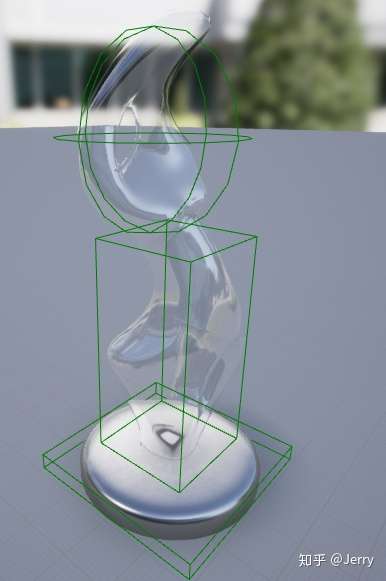
既然可以手拖碰撞,那我们也可以在UE里面使用第十种生成碰撞的方法:人工生成。还是以这个雕塑模型为例,我们添加两个盒形碰撞和一个球形碰撞,并适当绽放和移动位置,就可以得到近似的碰撞如下:
保存一下,回到编辑器里Play In Editor,然后在控制台show collision可见碰撞已经被修改:
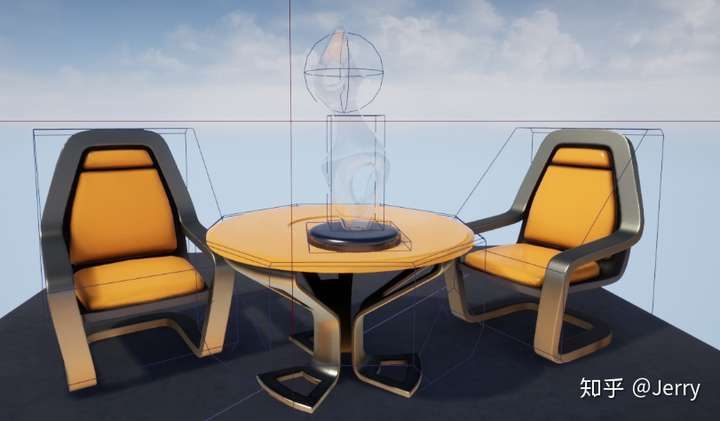
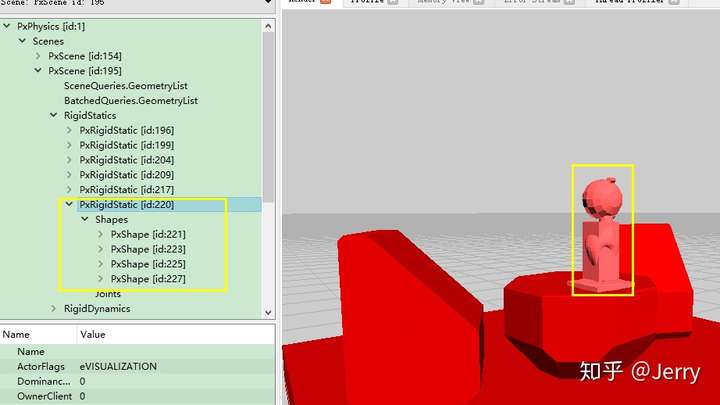
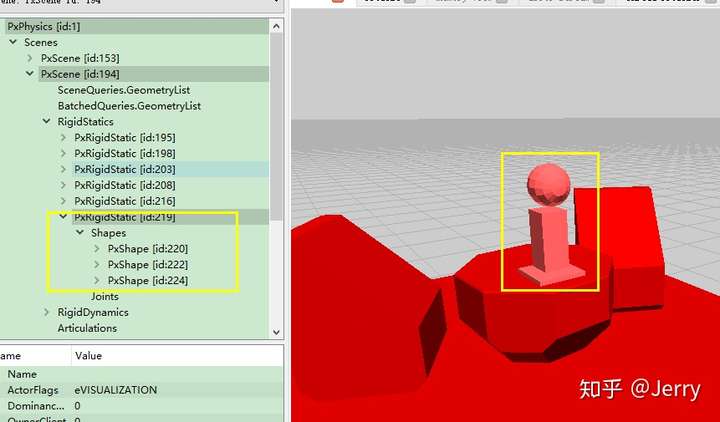
用pvd connect可视化样子上差不多,但有些模型重合的样子,这是因为叠加了mesh复杂碰撞:
选中这个模型,可以在左侧面板上看到详细的碰撞信息,此时碰撞PxShape个数是四个,分别是球,盒形柱身与盒形底座这三个简单碰撞,再加上mesh自身的复杂碰撞(旁边未修改过的椅子只有两个PxShape,对应一个简单碰撞和一个复杂碰撞)。
虽然UE4的show collision没有看到复杂碰撞,但PhysX建立的物理世界里却保留了这个复杂碰撞,后面在谈到物理Query时会说及啥时启用复杂碰撞,不过有一些基本概念还是要明确的,那就是碰撞复杂度越高,检测结果越精确,但性能越差。网上有Unity引擎下的一个大概检测结果视频,链接如下(需翻墙):
https://www.youtube.com/watch?v=u_fVE-IcPZ8www.youtube.com
我这里截几帧图(版权归Three Eyed Games):
对于球形碰撞:
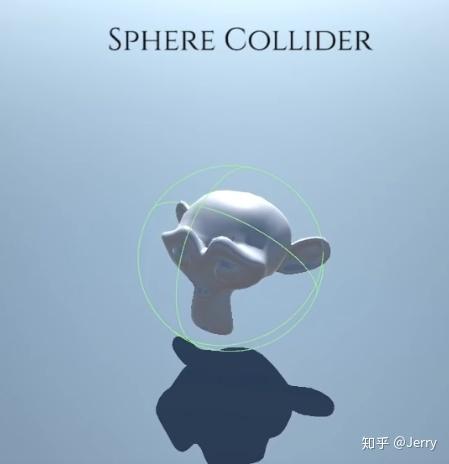
两万只模型同时掉落后某种运算时间是29.7ms:

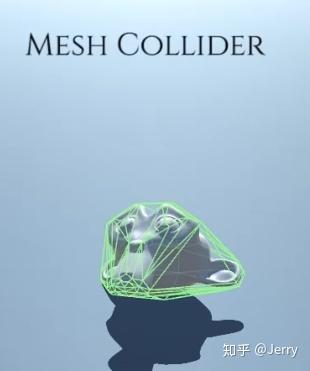
对于复杂碰撞(mesh作碰撞)运算时间是71.8ms:

对于18-DOP碰撞而言,运算时间是44.5ms:

所以与预想的一样,性能消耗是复杂mesh碰撞>k-DOP>球碰撞。
那么如果想在任何时候都不想启用复杂碰撞的话该如何做?在模型编辑器里,UE提供了配置方法如下:
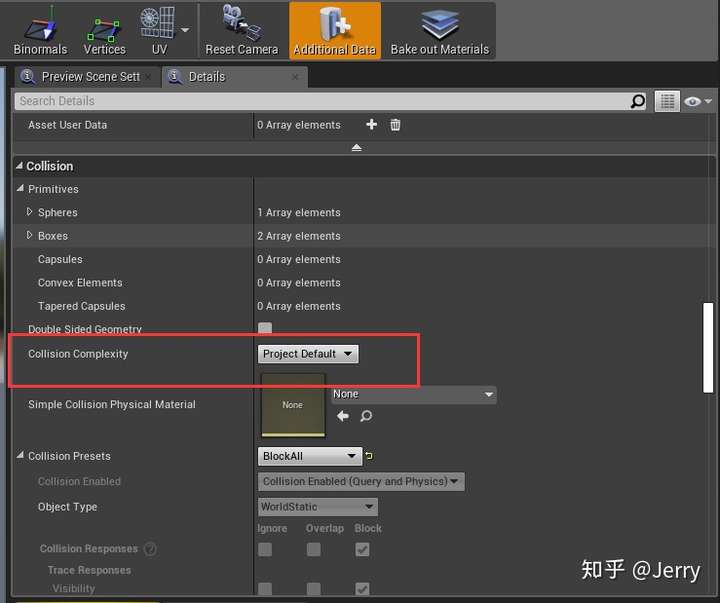
默认是ProjectDefault,这个在ProjectSetting里面默认配置成了Simple And Complex:
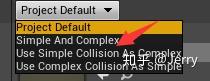
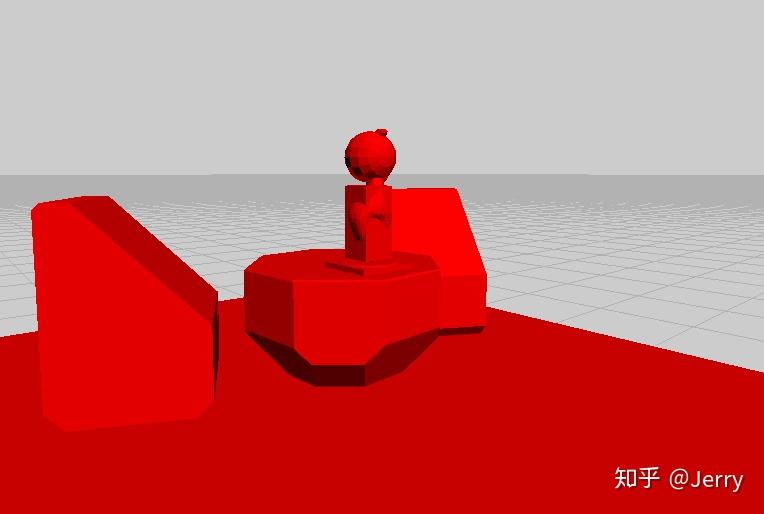
这样带入PhysX的既有简单碰撞,也有复杂碰撞了。如果我们选择第三个:Use Simple Collision As Complex,那么复杂mesh碰撞就不会带入PhysX了,选中后我们在PVD里面看下:
果然复杂mesh碰撞已经没有了,PxShape简化成了三个拼接的简单碰撞。如果选择了Use Complex Collision As Simple,那么简单碰撞就不会带入PhysX,如下:

顺道提一下UE模型编辑器里面的CollisionPresets:
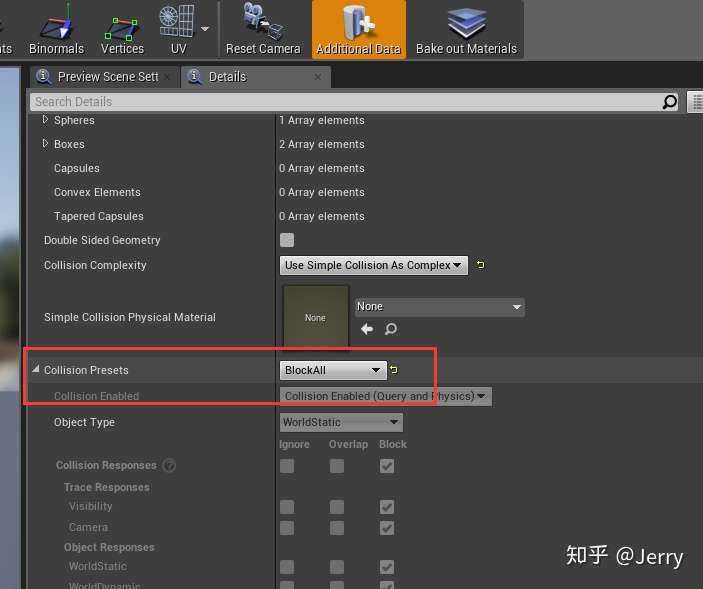
如果下面所有通道都是Ignore的话,PhysX就不会创建这个模型的碰撞信息,具体放到下一章节来说:
Jerry:UE4物理模块(三)---碰撞查询zhuanlan.zhihu.com
UE4物理模块(二)---建立物体碰撞的更多相关文章
- UE4物理模块(三)---碰撞查询(下)SAP/MBP/BVH算法简介
在上一文中介绍了碰撞查询的配置方法: Jerry:UE4物理模块(三)---碰撞查询(上)zhuanlan.zhihu.com 本篇介绍下UE4的各种零大小的射线检测,以及非零大小(带体积)的射线检 ...
- UE4物理模块(三)---碰撞查询(上)
在前一文中介绍了如何在UE4中创建简单碰撞或者直接使用其mesh表示的复杂碰撞: Jerry:UE4物理模块(二)---建立物体碰撞zhuanlan.zhihu.com 那么在拿到碰撞之后,就可以进 ...
- UE4物理模块(一)---概述与可视化调试
UE4.21前的版本采用的是NVIDIA的PhysX做为其默认的物理引擎,用于计算3D世界的碰撞查询与物理模拟.自4.21版本开始改物理调用接口,但这并不是闲来重构代码,果然在2019GDC大会上放出 ...
- UE4创建空白关卡并添加碰撞体
让我们接着上次继续学习UE4引擎,今天我们学习下怎样创建空白的关卡以及添加碰撞物体. 一. 创建空白关卡 1) 点击文件 -> 新建关卡(或者按快捷键Ctrl+N). 2) 你可以选择Defau ...
- Unity的物理引擎是如何实现碰撞的呢?
物理引擎不允许两个碰撞器重叠,当两个或多个物体碰撞时,Unity会根 据他们的旋转速度计算碰撞效果.计算主要根据物体的碰撞器是静止的还 是动态的.物体是不移动的,例如,墙,地面,院子里的喷池等.动态物 ...
- UE4物理动画使用
Rigid Body Body的创建. 对重要骨骼创建Body,保证Body控制的是表现和变化比较大的骨骼. 需要对Root创建Body并绑定,设置为Kinematic且不启用物理.原因是UPrimi ...
- NGINX模块(二)
[Nginx标准HTTP模块] 一.HTTP核心模块 指令1:alias 语法:alias file-path|directory-path; 默认值:no 使用字段:location 说明:这个指令 ...
- 【SSRS】入门篇(二) -- 建立数据源
原文:[SSRS]入门篇(二) -- 建立数据源 通过 [SSRS]入门篇(一) -- 创建SSRS项目 这篇,我们建立了一个SSRS项目: 接下来,我们以 AdventureWorks2012 示例 ...
- magento模块的建立
所有路径都是从根目录开始的: 1.建立模块的配置文件: 路径:app/etc/models/下建一个文件(模块名称是Orderlottery)为Bf170_Orderlottery.xml,内容如下: ...
随机推荐
- JS里面function和Function的区别
js里Function 与 function的不一样的,不仅仅是大小写的问题. 简单点说:大写的Function是一个类 ,而小写的function是一个对象. Function是一个构造器,func ...
- Android基础控件单选按钮RadioButton和Checkbox复选按钮的使用
1.相关简介 RadioButton需要和RadioGroup结合使用,在RadioGroup设置布局方式! Checkbox是单独使用,本文为了方便放在了RadioGroup中! 2.简单使用 方法 ...
- Android基础控件TextView
1.常用属性 <TextView android:id="@+id/text11" //组件id android:layout_width="match_paren ...
- How to ping and test for a specific port from Linux or Unix command line
Use telnet command The syntax is:telnet {host} {port}telnet www.cyberciti.biz 80telnet 192.168.2.254 ...
- 移动端video视频播放问题
1.视频播放后自动全屏 video添加playsinline webkit-playsinline属性 2.安卓暂停或播放完毕不能滑动 通过js判断机型,安卓去掉controls属性,ios保留co ...
- Python3.5 安装 & hello world
1.下载安装python https://www.python.org/downloads/release/python-364/ 2.安装成功运行 python shell 3.或者cmd => ...
- 利用PHP获取访客IP、地区位置、浏览器及来源页面等信息
这篇文章主要介绍了利用PHP获取访客IP.地区位置.浏览器及来源页面等信息的相关资料,文中给出了详细的示例代码供大家参考学习,对大家具有一定的参考借鉴价值,需要的朋友们下面来一起看看吧. 前言 本文中 ...
- 转:fork()子进程创建
源地址:http://blog.chinaunix.net/uid-23037385-id-2565472.html fork()子进程创建 在 UNIX 系统中,用户创建一个新进程的唯一方法就是调用 ...
- go modules
go modules官方资料:https://github.com/golang/go/wiki/Modules go版本控制发展史: Go 1.5 Release之前 使用GOPATH,包管理.项目 ...
- 线性求所有数模p的乘法逆元
推理: 假如当前计算的是x在%p意义下的逆元,设$p=kx+y$,则 $\Large kx+y\equiv 0(mod\ p)$ 两边同时乘上$x^{-1}y^{-1}$(这里代表逆元) 则方程变为$ ...