ROS教程3 ROS自定义msg类型及使用
1ROS自定义msg类型及使用
http://blog.csdn.net/u013453604/article/details/72903398
首先创建一个空的package单独存放msg类型(当然也可以在任意的package中自定义msg类型)
这里为便于说明,建立一个名为test_msgs的包,用于对自定义msg类型的用法举例
2参考西工大
https://github.com/HANDS-FREE/handsfree
一、创建msg消息
首先创建一个空的package单独存放msg类型(当然也可以在任意的package中自定义msg类型)
这里为便于说明,建立一个名为test_msgs的包,用于对自定义msg类型的用法举例
cd catkin_arduino_ros/src
catkin_create_pkg test_msgs

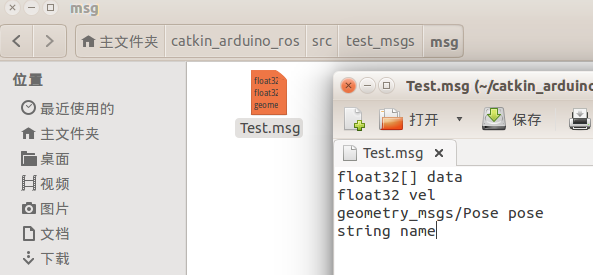
1.新建msg文件
cd test_msgs
mkdir msg
创建Test.msg的内容如下,
基本类型可参考: std_msgs、common_msgs
float32[] data
float32 vel
geometry_msgs/Pose pose
string name
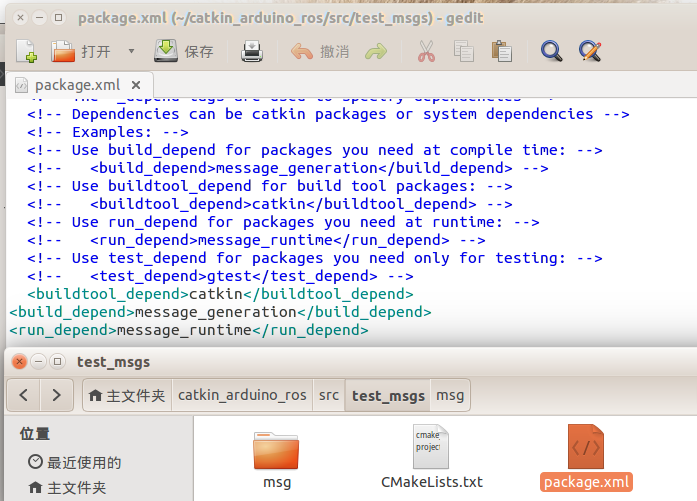
2.修改package.xml
接下来需要message_generation生成C++或Python能使用的代码,需要message_runtime提供运行时的支持,所以package.xml中添加以下两句
<build_depend>message_generation</build_depend>
<run_depend>message_runtime</run_depend>
3.修改CMakeLists.txt
(1)首先调用find_package查找依赖的包,必备的有roscpp rospy message_generation,其他根据具体类型添加,比如上面的msg文件中用到了geometry_msgs/Pose pose类型,那么必须查找geometry_msgs
find_package(catkin REQUIRED COMPONENTS roscpp rospy message_generation std_msgs geometry_msgs)
(2)然后是add_message_files,指定msg文件
add_message_files(
FILES
Test.msg
# Message2.msg
)
(3)然后是generate_messages,指定生成消息文件时的依赖项,比如上面嵌套了其他消息类型geometry_msgs,那么必须注明
#generate_messages必须在catkin_package前面
generate_messages(
DEPENDENCIES
geometry_msgs
)
(4)然后是catkin_package设置运行依赖
catkin_package( CATKIN_DEPENDS message_runtime )
到这里新的msg类型test_msgs/Test就可以使用了,下面编译这个包,然后利用rosmsg show指令查看
$ cd catkin_ws
$ catkin_make
$ rosmsg show test_msgs/Test
float32[] data
float32 vel
geometry_msgs/Pose pose
geometry_msgs/Point position
float64 x
float64 y
float64 z
geometry_msgs/Quaternion orientation
float64 x
float64 y
float64 z
float64 w
string name
二、msg的使用
要使用自定义的消息类型必须source自定义消息所在的工作空间,否则rosmsg show test_msgs/Test和rostopic echo /test_msg(/test_msg是节点中使用自定义消息类型test_msgs/Test的topic)都会报错,因为没有source的情况下自定义消息类型是不可见的,被认为是未定义类型
1.其他包调用自定义msg类型
如果是在test_msgs包内的节点中调用test_msgs/Test类型,只需要在.cpp文件中如下调用即可
#include <test_msgs/Test.h> test_msgs::Test msg;
如果是在其他包调用test_msgs/Test类型则需要修改package.xml和CMakeLists.txt,比如同样在工作空间catkin_arduino_ros内有一个名为test1_pub_sub的包,我们可以在这个包内写一个节点talker.cpp,使用我们刚才自定义的消息类型test_msgs/Test,如下:
(1)修改package.xml
<build_depend>roscpp</build_depend>
<run_depend>roscpp</run_depend> <build_depend>test_msgs</build_depend>
<run_depend>test_msgs</run_depend>
(2)修改CMakeLists.txt
调用自定义消息类型主要修改两个地方,以下是重点: 一是find_package中需要声明查找包含该消息类型的包; 二是add_dependencies要注明该消息的依赖,其他地方和普通节点一样
find_package(catkin REQUIRED COMPONENTS
roscpp
geometry_msgs
test_msgs
) add_dependencies(test1 test_msgs_gencpp)#调用同一工作空间的自定义消息类型时注明依赖关系,防止发生头文件找不到的报错
如果缺少add_dependencies中对test_msgs_gencpp的依赖声明,在编译的时候如果先编译test包再编译test_msgs包则会出现如下报错(ROS工作空间各个软件包的编译顺序是随机的),因为头文件test_msgs/Test.h还未生成
fatal error: test_msgs/Test.h: 没有那个文件或目录
#include "test_msgs/Test.h"
2 程序调用
#include "ros/ros.h"
#include "std_msgs/String.h"
#include <test_msgs/Test.h> // 添加自定义的消息
// 文件包 test_msgs下面 有一个自定义的 Test.msg
#include <sstream> int main(int argc, char **argv){ ros::init(argc, argv, "talker"); ros::NodeHandle n; //ros::Publisher chatter_pub = n.advertise<std_msgs::String>("chatter", 1000);
ros::Publisher chatter_pub = n.advertise<test_msgs::Test>("chatter", 1000);
ros::Rate loop_rate(10); //发布自定义消息类型test_msgs::Test int count = 0;
while (ros::ok())
{ std_msgs::String msg; std::stringstream ss;
ss << "hello world " << count;
msg.data = ss.str(); ROS_INFO("%s", msg.data.c_str()); test_msgs::Test mymsg; //创建自定义消息test_msgs::Test
/*
float32[] data
float32 vel
geometry_msgs/Pose pose
string name
*/
mymsg.name=ss.str(); // 为其中的分量
mymsg.vel=1;
// chatter_pub.publish(msg);
chatter_pub.publish(mymsg); //发布 ros::spinOnce(); loop_rate.sleep();
++count;
} return 0;
}
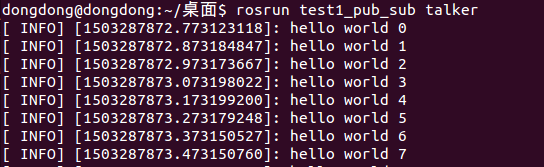
3 查看结果
运行
roscore rosrun test1_pub_sub talker
查看消息
rostopic list rostopic type /chatter rosmsg show test_msgs/Test

结果看到和我们定义的是一样的。
ROS教程3 ROS自定义msg类型及使用的更多相关文章
- ROS教程4 ROS自定义srv类型及使用
创建srv文件 在上一节单独为自定义的消息和服务的包 test_msgs 里面 创建 srv文件夹 进入创建 testsrv.srv 文件 ,内容为: (srv文件和msg文件类似,唯一不同的是它包含 ...
- ROS教程(一):ROS安装教程(详细图文)
ros教程:ros安装 目录 前言 一.版本选择 二.开始安装 2.1 软件中心配置 2.2 添加源 2.3 安装 三.验证ROS 前言 关于ROS(Robot OS 机器人操作系统),估计看这个教程 ...
- ROS教程
Learning ROS 学习ROS Depending on your learning style and preferences, you can take two approaches to ...
- 入门ROS教程与视频汇总(kinetic)
参考网址: Richard Wang 3 Shawn Chen 部分视频网址: http://v.youku.com/v_show/id_XMjUxMTc5MzE5Mg http://i.you ...
- ROS Learning-012 beginner_Tutorials (编程) 创建自定义的ROS消息和ROS服务
ROS Indigo beginner_Tutorials-11 创建自定义的ROS消息和ROS服务 我使用的虚拟机软件:VMware Workstation 11 使用的Ubuntu系统:Ubunt ...
- ROS教程2 编写简单的消息发布器和订阅器 (C++ catkin)
创建工作环境 创建文件夹,创建包 mkdir -p ~/catkin_arduino_ros/src catkin_create_pkg test1_pub_sub std_msgs rospy ro ...
- ROS与深度相机入门教程-在ROS使用kinect v1摄像头
ROS与深度相机入门教程-在ROS使用kinect v1摄像头 说明: 介绍在ros安装和使用kinect v1摄像头 介绍freenect包 安装驱动 deb安装 $ sudo apt-get in ...
- ROS教程(二):创建工作空间(图文)
ros教程:创建工作空间 目录 前言 一.工作空间? 二.创建一个工作空间 1.创建目录 2.编译 前言 使用catkin创建一个工作空间 一.工作空间? 在ROS系统下,我们所有的项目都放在一个工作 ...
- SLAM+语音机器人DIY系列:(二)ROS入门——2.ROS系统整体架构
摘要 ROS机器人操作系统在机器人应用领域很流行,依托代码开源和模块间协作等特性,给机器人开发者带来了很大的方便.我们的机器人“miiboo”中的大部分程序也采用ROS进行开发,所以本文就重点对ROS ...
随机推荐
- js------10种循环方法
let arr = [{a:1},{a:2},{a:3},{a:4},{a:5}]; // 1.while循环 let sum = 0; let num = 1; while(num <= 1) ...
- 微信小程序支付最容易犯的坑notify_url(支付回调)
最近做了微信小程序支付,支付成功之后发现notify_url回调地址竟然没有访问. 检查了无数次代码,下单结果里面的回调地址看了又看,都没有错啊. 把回调地址复制出来到浏览器上面,外网也是可以访问的啊 ...
- 近期ASP.NET问题汇总及对应的解决办法
1. 使用SQL统计一个字符串中指定字符的个数,示例(统计0的个数): ','')) 2. 使用Forms认证,客户端本地时间不对无法登陆系统,解决办法: FormsAuthentication.Re ...
- Java学习笔记之——类与对象
1.参数的传递方式 1)值传递 2)引用传递 2.类和对象: (1)类的定义: public class 类名{ 类型 属性1: 类型 属性2: ……… public 返回值类型 方法名1(形参){ ...
- 深入理解Java 8 Lambda(类库篇)
背景(Background) 自从lambda表达式成为Java语言的一部分之后,Java集合(Collections)API就面临着大幅变化.而 JSR 355(规定了 Java lambda 表达 ...
- lfs(systemd版本)学习笔记-第4页
我的邮箱地址:zytrenren@163.com欢迎大家交流学习纠错! lfs(systemd版本)学习笔记-第3页 的地址:https://www.cnblogs.com/renren-study- ...
- react-router与react-router-dom使用时的区别
1.React-router与React-router-dom的API对比 React-router:提供了router的核心api.如Router.Route.Switch等,但没有提供有关dom操 ...
- Linux常用系统命令
致歉:各位看到此博客的朋友们 因为命令的数量挺多的很多命令也都很简单 我就总结了一下具体的命令和这个命令是做什么的,主要的使用方法是链接到http://man.linuxde.net/的网站的,请各 ...
- 安全测试 一次关于WEB的URL安全测试
一次关于WEB的URL安全测试 by:授客 QQ:1033553122 测试思路: 时间精力问题,对web安全这块也没咋深入研究,但因为某个小插曲,公司要求先做个简单的安全测试,主要是针对UR ...
- loadrunner 场景设计-手工场景设计
场景设计-手工场景设计 by:授客 QQ:1033553122 概述 通过选择需要运行的脚本,分配运行脚本的负载生成器,在脚本中分配Vuser来建立手工场景 手工场景就是自行设置虚拟用户的变化,主要是 ...