Launch VINS-Mono with Realsense D435i in RTAB-Map
Preparation:
- Remap topic from D435i to rtabmap
- Feed the odometry to rtabmap
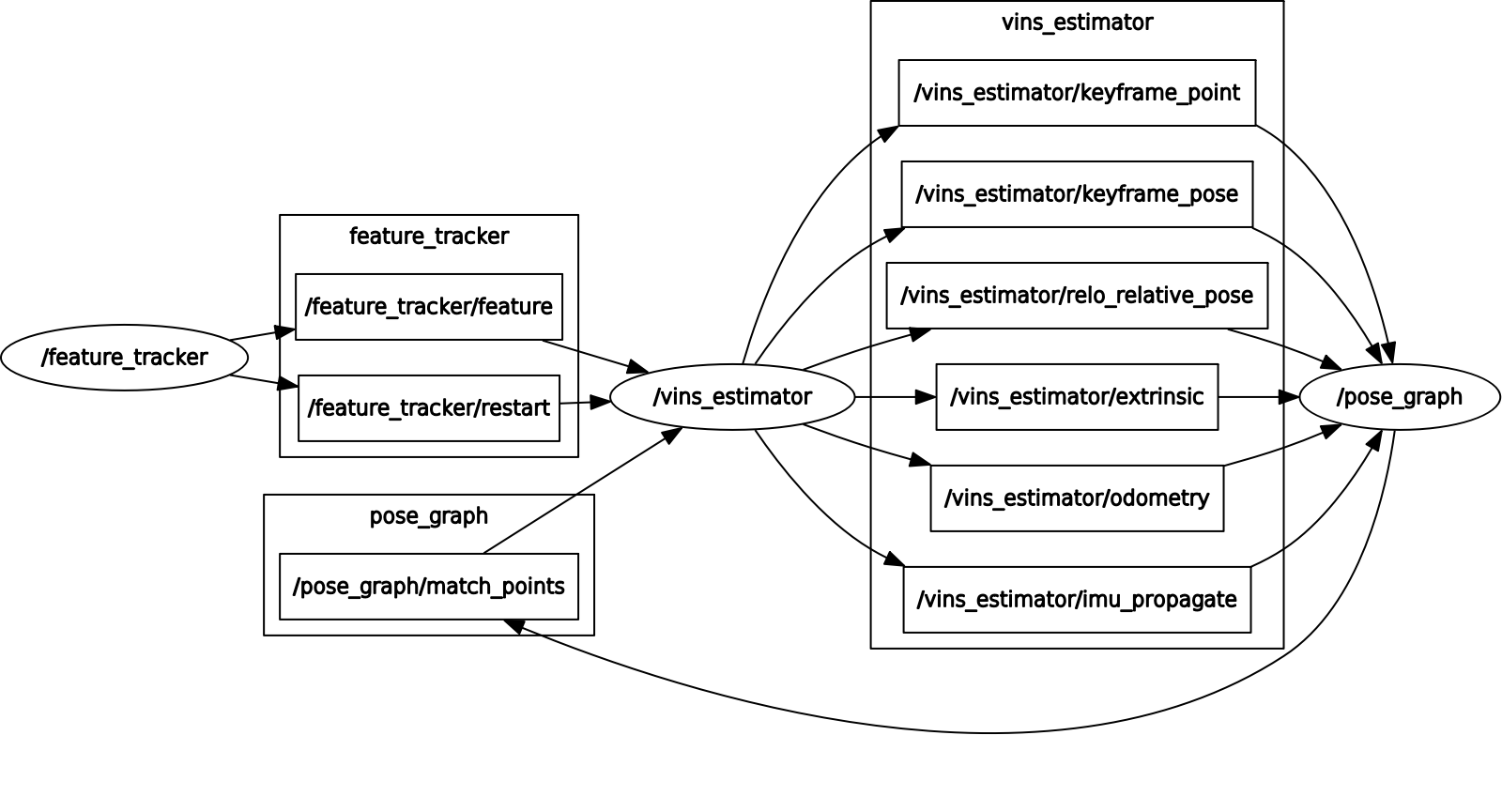
In the rqt_graph of vins_estimator, topic /vins_estimator/odometry is what rtabmap needs.
Running
Launch rtabmap:
roslaunch rtabmap_ros rtabmap.launch rtabmap_args:="--delete_db_on_start" depth_topic:=/camera/aligned_depth_to_color/image_raw rgb_topic:=/camera/color/image_raw camera_info_topic:=/camera/color/camera_info approx_sync:=false odom_topic:=/vins_estimator/odometry
Launch vins:
roslaunch vins_estimator realsense_color.launch
Launch realsense d434i:
roslaunch realsense2_camera rs_camera.launch
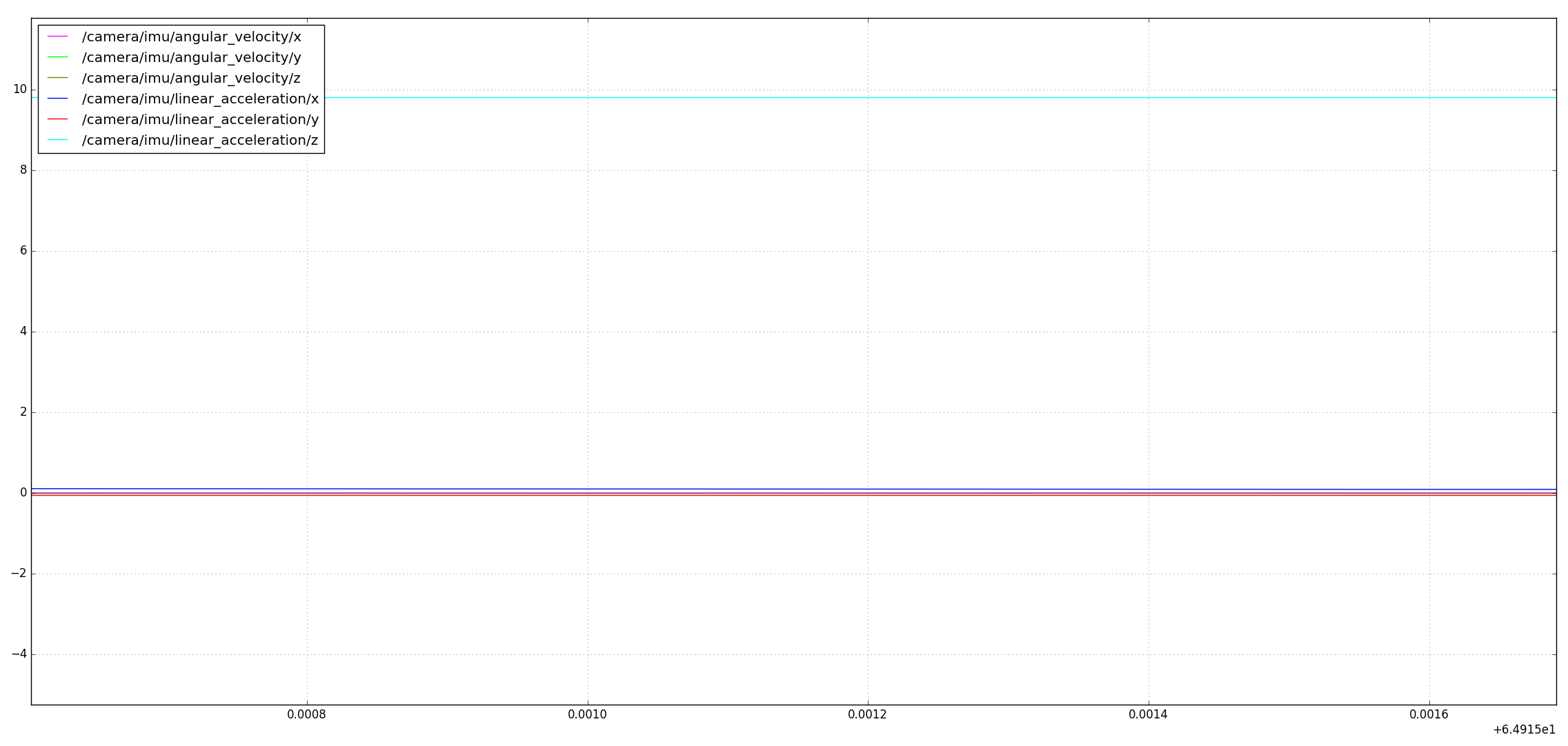
In addition, drifting of imu can be seen in rqt_plot by:
rqt_plot /camera/imu/linear_acceleration/x:y:z /camera/imu/angular_velocity/x:y:z
rosbag record
rosbag record -O wh_test /tf_static /camera/aligned_depth_to_color/image_raw /camera/color/image_raw /camera/color/camera_info /vins_estimator/odometry
Note that never forget topic /tf_static. It can be seen in rqt_graph when rtabmap was run successfully.
References:
[1] RGB-D Handheld Mapping
[2] 如何用Realsense D435i运行VINS-Mono等VIO算法 获取IMU同步数据
Launch VINS-Mono with Realsense D435i in RTAB-Map的更多相关文章
- VIN-Fusion config with Realsense D435i
### First shot Copy the .launch file in package VINS-Fusion to the directory of realsense2_cameara/l ...
- Launch VINS example (Euroc dataset) in RTAB-MAP
$ roslaunch rtabmap_ros euroc_datasets.launch args:="-d RGBD/CreateOccupancyGrid false Odom/Str ...
- Ubuntu 16.04 + Realsense D435i + ROS 环境配置
参考: [1] Realsense-Ros: https://github.com/IntelRealSense/realsense-ros#installation-instructions [2] ...
- realsense d435i問題太多了
Selecting Windows SDK version 10.0.17134.0 to target Windows 10.0.18362. Internet connection identif ...
- ROS kinetic + Realsens D435i + ORK + LINEMOD 物体识别
1. ORK 网址:https://wg-perception.github.io/object_recognition_core/ ORK (Object Recognition Kitchen) ...
- 基于Mono和VSCode打造轻量级跨平台IDE
近期Visual Studio推出Mac版本号的消息迅速在技术圈里刷屏,当project师们最喜欢的笔记本电脑Mac,邂逅地球上最强大的集成开发环境Visual Studio的时候,会碰撞出如何精 ...
- Kalibr installation tutorial
How to install Kalibr I was confused about installing Kalibr, but there is no even one hint in READM ...
- 三维视觉惯性SLAM的有效Schmidt-EKF
三维视觉惯性SLAM的有效Schmidt-EKF An Efficient Schmidt-EKF for 3D Visual-Inertial SLAM 论文地址: http://openaccess ...
- server computer (实验室移动服务器环境)
star@xmatrix:~$ lshwWARNING: you should run this program as super-user.xmatrix ...
随机推荐
- BigDecimal进行精确运算demo工具类
package com.js.ai.modules.pointwall.interfac; import java.math.BigDecimal; public class TestDigDecim ...
- Linux - 对文件和目录的权限管理
对文件的权限管理 ls -l,也可以用 ll 命令查看文件权限的相关信息 第一列“-rw-r--r--.”为权限信息,权限信息的最后一个点表示为在安全环境下创建的 第二列“1”为硬链接数,第三列“ro ...
- Linux quota命令参数及用法详解---Linux磁盘配额限制设置和查看命令
功能说明:显示磁盘已使用的空间与限制. 语 法:quota [-quvV][用户名称...] 或 quota [-gqvV][群组名称...] 补充说明:执行quota指令,可查询磁盘空间的限制,并得 ...
- LinqHelper连接数据库配置
LinqHelper连接数据库配置/// <summary> /// Linq通用数据访问类 /// 指定TDataBase来代替后面要使用的数据上下文(指代) /// where:说明指 ...
- VS2010中将CString转换为const char*
最近碰到了CString 转 const char *的问题. 以前只要简单的一个强制转换就OK了,可现在是不行了,搜索了很多资料,终于搞定,主要是Unicode和ANSI的问题,只要做一个转换就可以 ...
- REST的含义和RESTful架构入门
REST的含义和RESTful架构入门 提纲 1.REST架构的作用 2.REST和RESTful 3.REST的具体含义 3.1 资源实体 3.2 资源实体的表现层 3.3. 资源实体某一变现层的状 ...
- Python代码的编译
Python代码的编译 Python代码在解释执行之前,是会被编译成.pyc或者.pyo文件的,它们是中间字节码表示的文件,之后Python虚拟机才会去解释执行它们. 1.pyc文件 ======== ...
- CronTrigger表达式和Quartz使用实例入门
CronTriggers往往比SimpleTrigger更有用,如果您需要基于日历的概念,而非SimpleTrigger完全指定的时间间隔,如每月8日发工资的定时任务. CronTrigger,你可以 ...
- CentOS7 启动docker.service失败(code=exited, status=1/FAILURE)
启动报错 Job for docker.service failed because the control process exited with error code. See "sys ...
- 【bzoj1614】[Usaco2007 Jan]Telephone Lines架设电话线
题目描述 Farmer John打算将电话线引到自己的农场,但电信公司并不打算为他提供免费服务.于是,FJ必须为此向电信公司支付一定的费用. FJ的农场周围分布着N(1 <= N < ...