Python的串口通信(pyserial)
串口通信是指外设和计算机间,通过数据信号线 、地线、控制线等,按位进行传输数据的一种通讯方式。这种通信方式使用的数据线少,在远距离通信中可以节约通信成本,但其传输速度比并行传输低。串口是计算机上一种非常通用的设备通信协议。pyserial模块封装了python对串口的访问,为多平台的使用提供了统一的接口。
安装:
pip3 install pyserial
测试:
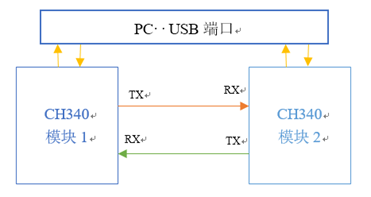
两个CH340 (TTL转串口模块)接入到PC串口上,通过Python进行数据交互:
简单串口程序实现:
import serial #导入模块
try:
#端口,GNU / Linux上的/ dev / ttyUSB0 等 或 Windows上的 COM3 等
portx="COM3"
#波特率,标准值之一:50,75,110,134,150,200,300,600,1200,1800,2400,4800,9600,19200,38400,57600,115200
bps=115200
#超时设置,None:永远等待操作,0为立即返回请求结果,其他值为等待超时时间(单位为秒)
timex=5
# 打开串口,并得到串口对象
ser=serial.Serial(portx,bps,timeout=timex) # 写数据
result=ser.write("我是东小东".encode("gbk"))
print("写总字节数:",result) ser.close()#关闭串口 except Exception as e:
print("---异常---:",e)
获取可用串口列表:
import serial #导入模块 import serial.tools.list_ports
port_list = list(serial.tools.list_ports.comports())
print(port_list)
if len(port_list) == 0:
print('无可用串口')
else:
for i in range(0,len(port_list)):
print(port_list[i])
十六进制处理:
import serial #导入模块
try:
portx="COM3"
bps=115200
#超时设置,None:永远等待操作,0为立即返回请求结果,其他值为等待超时时间(单位为秒)
timex=None
ser=serial.Serial(portx,bps,timeout=timex)
print("串口详情参数:", ser) #十六进制的发送
result=ser.write(chr(0x06).encode("utf-8"))#写数据
print("写总字节数:",result) #十六进制的读取
print(ser.read().hex())#读一个字节 print("---------------")
ser.close()#关闭串口 except Exception as e:
print("---异常---:",e)
其他细节补充:
import serial #导入模块
try: #端口,GNU / Linux上的/ dev / ttyUSB0 等 或 Windows上的 COM3 等
portx="COM3"
#波特率,标准值之一:50,75,110,134,150,200,300,600,1200,1800,2400,4800,9600,19200,38400,57600,115200
bps=115200
#超时设置,None:永远等待操作,0为立即返回请求结果,其他值为等待超时时间(单位为秒)
timex=5
# 打开串口,并得到串口对象
ser=serial.Serial(portx,bps,timeout=timex)
print("串口详情参数:", ser) print(ser.port)#获取到当前打开的串口名
print(ser.baudrate)#获取波特率 result=ser.write("我是东小东".encode("gbk"))#写数据
print("写总字节数:",result) #print(ser.read())#读一个字节
# print(ser.read(10).decode("gbk"))#读十个字节
#print(ser.readline().decode("gbk"))#读一行
#print(ser.readlines())#读取多行,返回列表,必须匹配超时(timeout)使用
#print(ser.in_waiting)#获取输入缓冲区的剩余字节数
#print(ser.out_waiting)#获取输出缓冲区的字节数 #循环接收数据,此为死循环,可用线程实现
while True:
if ser.in_waiting:
str=ser.read(ser.in_waiting ).decode("gbk")
if(str=="exit"):#退出标志
break
else:
print("收到数据:",str) print("---------------")
ser.close()#关闭串口 except Exception as e:
print("---异常---:",e)
部分封装:
其中读数据的封装方法并不是很好用,使用的话又得循环接收,这样反而更加复杂了
import serial #导入模块
import threading
STRGLO="" #读取的数据
BOOL=True #读取标志位 #读数代码本体实现
def ReadData(ser):
global STRGLO,BOOL
# 循环接收数据,此为死循环,可用线程实现
while BOOL:
if ser.in_waiting:
STRGLO = ser.read(ser.in_waiting).decode("gbk")
print(STRGLO) #打开串口
# 端口,GNU / Linux上的/ dev / ttyUSB0 等 或 Windows上的 COM3 等
# 波特率,标准值之一:50,75,110,134,150,200,300,600,1200,1800,2400,4800,9600,19200,38400,57600,115200
# 超时设置,None:永远等待操作,0为立即返回请求结果,其他值为等待超时时间(单位为秒)
def DOpenPort(portx,bps,timeout):
ret=False
try:
# 打开串口,并得到串口对象
ser = serial.Serial(portx, bps, timeout=timeout)
#判断是否打开成功
if(ser.is_open):
ret=True
threading.Thread(target=ReadData, args=(ser,)).start()
except Exception as e:
print("---异常---:", e)
return ser,ret #关闭串口
def DColsePort(ser):
global BOOL
BOOL=False
ser.close() #写数据
def DWritePort(ser,text):
result = ser.write(text.encode("gbk")) # 写数据
return result #读数据
def DReadPort():
global STRGLO
str=STRGLO
STRGLO=""#清空当次读取
return str if __name__=="__main__":
ser,ret=DOpenPort("COM6",115200,None)
if(ret==True):#判断串口是否成功打开
count=DWritePort(ser,"我是东小东,哈哈")
print("写入字节数:",count)
#DReadPort() #读串口数据
#DColsePort(ser) #关闭串口
参考:
https://blog.csdn.net/wjcq8455/article/details/77981616
https://pythonhosted.org/pyserial/pyserial_api.html#serial.Serial.open
Python的串口通信(pyserial)的更多相关文章
- 基于Arduino和python的串口通信和上位机控制
引言 经常的时候我们要实现两个代码之间的通信,比如说两个不同不同人写的代码要对接,例如将python指令控制Arduino控件的开关,此处使用串口通信是非常方便的,下面笔者将结合自己踩过的坑来讲述下自 ...
- Python实现串口通信(pyserial)
pyserial模块封装了对串口的访问,兼容各种平台. 安装 pip insatll pyserial 初始化 简单初始化示例 import serial ser = serial.Serial('c ...
- Raspberry pi 使用python+pySerial实现串口通信(转)
Raspberry pi 使用python+pySerial实现串口通信 转:http://blog.csdn.net/homeway999/article/details/8642353 目录( ...
- [python] 3 、基于串口通信的嵌入式设备上位机自动测试程序框架(简陋框架)
星期一, 20. 八月 2018 01:53上午 - beautifulzzzz 1.前言 做类似zigbee.ble mesh...无线网络节点性能测试的时候,手动操作然后看表象往往很难找出真正的原 ...
- Python 串口通信 GUI 开发
在项目中遇到树莓派串口通信问题.由于本人一直从事.net 开发,希望将树莓派系统换成Win10 IOT版.但是在测试过程中出现无法找到串口的问题.最终也没有解决.最终按照领导要求,linux (了解不 ...
- Python的扩展接口[1] -> 串口通信
串口通信 / Serial Communication 1 串口简介 / Serial Introduction 串行接口(Serial Interface)简称串口,通常为COM接口,数据发送方式为 ...
- Python编程实现USB转RS485串口通信
---作者吴疆,未经允许,严禁转载,违权必究--- ---欢迎指正,需要源码和文件可站内私信联系--- -----------点击此处链接至博客园原文----------- 功能说明:Python编程 ...
- raspi串口、python串口模块pyserial
一.安装 1.下载软件包pyserial-2.7.tar.gz 网址:https://pypi.python.org/pypi/pyserial 2.8uftp上传至/usr/local/src/ ...
- win10上使用php与python实现与arduino串口通信
注意: php 需要php7,安装及开启php_dio.dll com口按照实际的进行设置,如果不知道可以打开arduino编辑器进行查看 可以与用户实现命令行交互,但是效率过慢,不清楚如何优化,使用 ...
随机推荐
- elementUI中表格中表单的验证
表格中的表单验证,就是在将表格放在表单中,将表格绑定的数据也放在表单中. 最重要的是要给表格中需要验证的字段动态添加prop,再给其绑定规则. <el-form :model="tab ...
- 惠普笔记本fn键
fn+shift+f10 看到fn上的小灯亮了就可以了
- web安全之机器学习入门——3.1 KNN/k近邻
目录 sklearn.neighbors.NearestNeighbors 参数/方法 基础用法 用于监督学习 检测异常操作(一) 检测异常操作(二) 检测rootkit 检测webshell skl ...
- 实际操作--create DB link
我可以查看6D1数据库中的表了:我在哪个表里创建database说明我想访问database中的表~ SELECT * FROM TEST001MX@TESTLINK1 databa ...
- MySQL 连接出现 Authentication plugin 'caching_sha2_password' cannot be loaded
参考帖子: https://www.cnblogs.com/zhurong/p/9898675.html cmd 需要使用管理员权限打开
- hw3
1. 2.将MAXPRIMES的值设为4,t2会发生越界错误,t1不会. 3.令n = 1,此时不满足while语句的判断条件,不执行while循环. 4. 点覆盖:{1,2,3,4,5,6,7,5, ...
- PHP配置文件详解php.ini
[PHP] ; PHP还是一个不断发展的工具,其功能还在不断地删减 ; 而php.ini的设置更改可以反映出相当的变化, ; 在使用新的PHP版本前,研究一下php.ini会有好处的 ;;;;;;;; ...
- MyEclipse has detected that less than 5% of
选择Windows->Preferences; 2 选择MyEclipse->Servers->Integrated Sandbox->MyEclispe Tomcat 6 ...
- 记一次需要用到复杂的groupingBy的需求
一:先定义结构 public class Foo { private Integer id; private String name; private BigDecimal amount; publi ...
- Django认证系统
一.cooie与session 1.1 cookie与session cooie不属于http协议范围,由于http协议无法保持状态,但实际情况,我们却又要保持状态,因此cookie就是在这样的一个场 ...