Unity3D-RayMarch-几何图元1-添加基本着色模型
效果图:
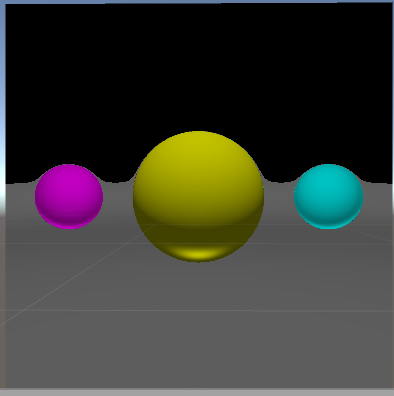
使用phong着色模型,将环境光、物体的漫反射光、镜面光三种光效加合而得到上图的效果
raymarch 的shader代码:
// Upgrade NOTE: replaced '_Object2World' with 'unity_ObjectToWorld'
Shader "RayMarch/Primitives1_phong"
{
Properties
{
_MainTex("Texture", 2D) = "white" {}
}
SubShader
{
Tags{ "RenderType" = "Opaque" }
LOD
Pass
{
CGPROGRAM
#pragma vertex vert
#pragma fragment frag
#include "UnityCG.cginc"
#include "Lighting.cginc"
#define PointLightPos fixed3(0, 3, 0)
#define LightColor float3(1,1,1)
#define GlobalAmibent float3(0.1,0.1,0.1)
struct appdata
{
float4 vertex : POSITION;
float2 uv : TEXCOORD0;
};
struct v2f
{
float2 uv : TEXCOORD0;
float4 vertex : SV_POSITION;
};
sampler2D _MainTex;
float4 _MainTex_ST;
//###################################################################################
//sdf:define primitives
float sdPlane(float3 p,float planeYPos)
{
return p.y - planeYPos;
}
float sdSphere(float3 p, float3 spherePos, float radius)
{
return length(p - spherePos) - radius;
}
//###################################################################################
//###################################################################################
//primitives boolean operation
//求并集
float2 opU(float2 d1, float2 d2)
{
return (d1.x<d2.x) ? d1 : d2;
}
//###################################################################################
// define the scene
float2 map(in float3 pos)
{
//plane
//float2(x,y)的第二个参数定义了该物体的材质id,在render环节,可以根据id做不同处理
float2 plane = float2(sdPlane(pos, -);
float2 ball_1 = float2(sdSphere(pos, float3(, , ), );
float2 ball_2 = float2(sdSphere(pos, float3(, , ), );
float2 ball_3 = float2(sdSphere(pos, float3(-, , ), );
//求物体的并集
float2 res = opU(opU(opU(ball_1, ball_2), ball_3),plane);
return res;
}
float2 castRay(in float3 ro, in float3 rd)
{
float tmin = 1.0;
//射线最大允许经过的距离
float tmax = 100.0;
//当前已经过的距离
float t = tmin;
//材质id
float m = -1.0;
//最大迭代次数定位64
; i<; i++)
{
//距离精度随距离的增加而减小
float precis = 0.0005*t;
//获得场景中物体距离该点的距离,及距离最近物体的材质id
float2 res = map(ro + rd*t);
//如果与场景物体发生碰撞,或者射线行进距离超出最大范围,则跳出迭代
if (res.x<precis || t>tmax) break;
t += res.x;
m = res.y;
}
if (t>tmax) m = -1.0;
return float2(t, m);
}
//计算碰撞点处物体表面的法线
float3 calcNormal(in float3 pos)
{
float3 eps = float3(0.0005, 0.0, 0.0);
float3 nor = float3(
map(pos + eps.xyy).x - map(pos - eps.xyy).x,
map(pos + eps.yxy).x - map(pos - eps.yxy).x,
map(pos + eps.yyx).x - map(pos - eps.yyx).x);
return normalize(nor);
}
float3 BasicPhong(fixed3 lightDir, fixed3 normalDir, fixed3 viewDir, int matIndex) {
, Kd = , Ks = , Shininess = ;
float3 matColor = float3();
switch (matIndex) {
:
//极远处
matColor = float3(, , );
break;
:
matColor = float3(0.1, 0.1, 0.1);
break;
:
matColor = float3(); Shininess = ;
break;
:
matColor = float3(, 0.5, 0.5);
break;
:
matColor = float3(, 0.5);
break;
default:
break;
}
float3 amibent = Ka * GlobalAmibent * matColor;
float3 diffuse = Kd * LightColor * clamp(dot(normalDir, lightDir), , ) * matColor;
fixed3 reflectDir = reflect(-lightDir, normalDir);
float3 specular = Ks * LightColor * pow(clamp(dot(viewDir, reflectDir), , ), Shininess) * matColor;
float3 color = amibent + diffuse + specular;
return color;
}
float3 render(in float3 ro, in float3 rd)
{
//投掷射线,获得与所场景物体的碰撞信息
float2 res = castRay(ro, rd);
float t = res.x;
float m = res.y;
float3 pos = ro + t*rd;
float3 nor = calcNormal(pos);
fixed3 lightPos = PointLightPos;
fixed3 lightDir = normalize(lightPos - pos);
float3 col = BasicPhong(lightDir, nor, rd, m);
return col;
}
v2f vert(appdata v)
{
v2f o;
o.vertex = UnityObjectToClipPos(v.vertex);
o.uv = TRANSFORM_TEX(v.uv, _MainTex);
return o;
}
fixed4 frag(v2f i) : SV_Target
{
//虚拟摄像机坐标
float3 ro = float3(,,-);
//投影面某点坐标
float3 p = float3(i.uv - float2();
//投掷射线
float3 rd = normalize(p - ro);
fixed4 col = fixed4(render(ro, rd).rgb, );
// gamma校正
col.rgb = pow(col.rgb, float3(0.4545, 0.4545, 0.4545));
return col;
}
ENDCG
}
}
}
Unity3D-RayMarch-几何图元1-添加基本着色模型的更多相关文章
- osg 基本几何图元
转自:osg 基本几何图元 //osg 基本几何图元 // ogs中所有加入场景中的数据都会加入到一个Group类对象中,几何图元作为一个对象由osg::Geode类来组织管理. // 绘制几何图元对 ...
- OpenCV入门系列教学(三)绘制几何形状及添加文本
一.绘制简单的几何形状和添加文本 opencv中绘制图形很简单,我们只需要使用下面这些常用函数即可. #画线 cv2.line() #画圆 cv2.circle() #画矩形 cv. rectangl ...
- Django编写RESTful API(五):添加超链接提高模型间的关联性
前言 在第四篇中,加入了用户模型,以及相关的认证和权限的功能.但是我们在使用的时候,会发现在访问http://127.0.0.1:8000/users/时看到的用户列表,不能够直接点击某个链接然后查看 ...
- ROS * 通过launch文件添加多个模型
我添加的是dae模型,urdf文件过两天贴 方法一 : <launch> <!-- these are the arguments you can pass this launch ...
- Unity3D NGUI 给button按钮添加单间事件
Unity3D中, NGUI 给button按钮添加单间事件的方法很多,在这里只给推荐一种比较常用的方法. 推荐方法:使用UIListener. 1.给button组价添加上UIListener.选择 ...
- Unity3D-RayMarch-几何图元-3添加阴影
效果图: 在RayMarch渲染算法中计算阴影非常简单,当射线碰撞到物体,从碰撞点逆着光源方向再次执行射线步进算法,如果这一过程中碰撞到了其他物体,则碰撞点被其他物体遮挡,该处具有阴影. shader ...
- Unity3D Animator控制参数和添加事件
Animator控制参数和添加事件 using UnityEngine; using System.Collections; public class AniControl : MonoBehavio ...
- openGl超级宝典学习笔记 (2) 7个主要的几何图元
点(GL_POINTS): 点总是正方形的像素,默认情况下,点的大小不受透视除法影响. 即无论与视点的距离怎样,它的大小都不改变.为了获得圆点.必须在抗锯齿模式下绘制点. 能够用glPointSize ...
- 【学习笔记】OSG 基本几何图元
例:geom->addPrimitiveSet(new osg::DrawArrays(osg::PrimitiveSet::QUADS,0,4)); 来指定要利用这些数据生成一个怎么样的形状. ...
随机推荐
- [编码实践]SpringBoot实战:利用Spring AOP实现操作日志审计管理
设计原则和思路: 元注解方式结合AOP,灵活记录操作日志 能够记录详细错误日志为运营以及审计提供支持 日志记录尽可能减少性能影响 操作描述参数支持动态获取,其他参数自动记录. 1.定义日志记录元注解, ...
- 前端人员使用notepad++基本配置
截图说明: 以上截图说的很明确了,基本满足基本的开发. notepad++前端配置版支持Emmet快速完成:支持Explorer目录管理:支持cmd控制台命令:支持MarkDown编辑预览:其他想用的 ...
- (20/24) webpack实战技巧:watch实现热打包和添加代码备注
在前面的学习中,我们一直使用webpack-dev-server充当(本地)服务器和完成打包任务,但是当出项目团队联合开发,共同使用一个服务器时,这时候我们需要实时进行打包以确保团队间能进行联调或者进 ...
- Sublime Text 3 插件
1.快捷键:ctrl+shift+P 2.输入install package,选择install package 3.输入需要安装的插件,选择安装 4.重启sublime 1. 格式化 html-cs ...
- 看Spring注解之IOC记录
首先看源码里有些是java的元注解记录的有如下几个: @Inherited注释:指明被注解的类会自动继承.更具体地说,如果定义注解时使用了 @Inherited 标记,然后用定义的注解来标注另一个父类 ...
- servlet的运行机制,转发和重定向
一.当发送一个请求到服务器端的时候,容器(tomcat)会判断该路径属于哪一个servlet进行处理,servlet有一个抽象父类“httpservlet”,这个类是一个模板设计模式的类,其中serv ...
- ajax的4个字母分别是什么意思
Asynchronous JavaScript and XML 的缩写,异步的JavaScript和XML.在不重新加载整个页面的情况下 ,AJAX 与服务器交换数据并更新部分网页.
- 虚拟机安装及ubuntu-16.04.3-desktop-amd64.iso映像文件的安装
虚拟机安装及ubuntu-16.04.3-desktop-amd64.iso映像文件 搞了大半天才搞清楚装linux的前提是要先安装虚拟机的 先下载虚拟机,在然后创建虚拟机,在虚拟机里面再安装linu ...
- 本地jar包添加至Maven仓库
Maven命令将本地的jar包方放到maven仓库中 //自定义本地的jar包在pom文件的参数 <dependency> <groupId>com.eee</group ...
- MemoryStream说明
MemoryStream 是内存流,为系统内存提供读写操作,由于 MemoryStream 是通过无符号字节数组组成的,可以说 MemoryStream 的性能可以算比较出色,所以它担当起了一些其他流 ...