基于FPGA的Cordic算法实现
CORDIC(Coordinate Rotation Digital Computer)算法即坐标旋转数字计算方法,是J.D.Volder1于1959年首次提出,主要用于三角函数、双曲线、指数、对数的计算。该算法通过基本的加和移位运算代替乘法运算,使得矢量的旋转和定向的计算不再需要三角函数、乘法、开方、反三角、指数等函数。
本文是基于FPGA实现Cordic算法的设计与验证,使用Verilog HDL设计,初步可实现正弦、余弦、反正切函数的实现。将复杂的运算转化成FPGA擅长的加减法和乘法,而乘法运算可以用移位运算代替。Cordic算法有两种模式,旋转模式和向量模式。可以在圆坐标系、线性坐标系、双曲线坐标系使用。本文线初步实现在圆坐标系下的两种模式的算法实现。
Cordic算法简化
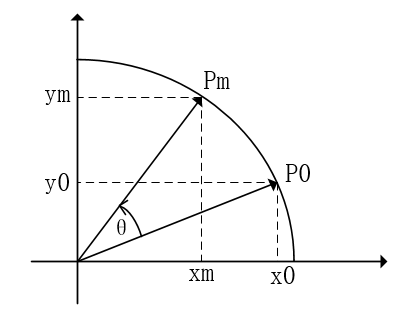
旋转模式,迭代位移算法。假设有一点P0(x0,y0),经过顺时针旋转角度θ,到达点Pm(xm,ym),我们根据数学运算可以得到公式如下:
xm = x0cosθ - y0sinθ = cosθ(x0 – y0tanθ)
ym = y0cosθ + x0sinθ = cosθ(y0 – x0tanθ)
如果不考虑旋转后的向量模值,只考虑旋转角度,即去掉cosθ,得到如下方程式。这里旋转的角度的正确的,但x和y的值增加。cosθ值是小于等于1的,值大于等于1,所以模值应该增大。我们不能通过适当的数学计算去掉cosθ,但是去掉cosθ项可以方便我们后面的坐标平面旋转的计算。这里称为伪旋转。
xm = x0 – y0tanθ
ym = y0 – x0tanθ
Cordic的方法核心就是伪旋转,将旋转角θ细化成若干个大小固定的角度θi,规定θi满足tanθi = 2^-i,通过一系列的迭代旋转,每次旋转θi,i为迭代次数,规定∑θi的范围即旋转角度θ的范围为[-99.7, 99.7]。如果θ的大于这个范围则可通过三角运算操作转化到该范围的角度。
我们通过事先将所有每次旋转的角度计算出来,由于每次旋转的角度是固定的,所以经过i次旋转的∑θi可能会超过θ,所以就必须设置一个方向值di,如果旋转角度之和已经小于θ,则di为1,下次旋转继续为顺时针旋转,如果旋转角度之和大于θ,则di为-1,下次旋转为逆时针。设置zi+1为旋转剩余角度,zi+1 = z0 – dizi,z0 = θ,随着i值得增大,zi+1会趋向于0时,即旋转结束。di与zi的符号位相同。
采用伪旋转的方法,每次提出一个cosθi,旋转结束后会产生一个∏cosθi的累乘,一旦我们确定了迭代次数,∏cosθi就是一个常数,迭代公式可写为。这是讲cosθi提出、tanθi 替换成 2^-i后的结果。di与zi的符号位相同。
xi+1 = xi - di * yi * 2^-i
yi+1 = yi + di * xi * 2^-i
zi+1 = z0 - di * θi
设迭代i = n - 1,那么旋转n次后得到Pm的坐标应该为(xn * ∏cosθi, yn * ∏cosθi)。应为每次迭代都会提出一个cosθi,旋转n次后的xn和yn就会少乘一个∏cosθi,所以实际上最终的Pm坐标角度近似于(xn * ∏cosθi, yn * ∏cosθi)。
xn * ∏cosθi = x0cosθ - y0sinθ
yn * ∏cosθi = y0cosθ + x0sinθ
xn = 1/∏cosθi (x0cosθ – y0sinθ)
yn = 1/∏cosθi (y0cosθ – x0sinθ)
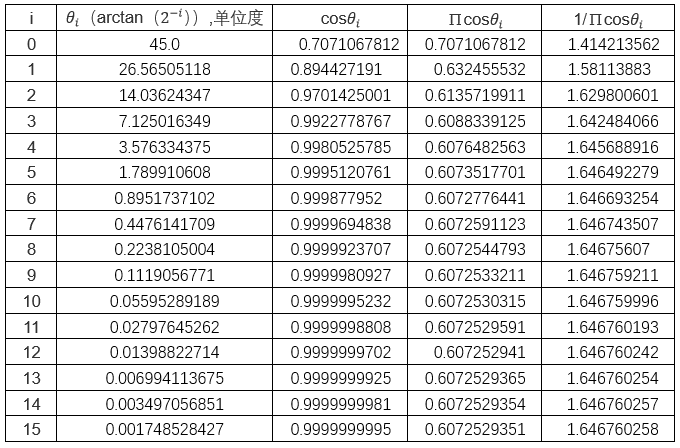
伸缩因子,KN = 1 / ∏cosθi,已知迭代次数,我们可以预先计算KN的值。如下这是博主使用MATLAB计算出的迭代结果数值。
xn =KN (x0cosθ – y0sinθ)
yn = KN (y0cosθ – x0sinθ)
从上表可以得出,我们预先计算出KN的值,然后令x0 = ∏cosθi,y0 = 0,则上述公式可化简为
xn = cosθ
yn = sinθ
即可实现正弦、余弦操作了。
旋转模式
总结一下,Cordic算法旋转模式使用Verilog HDL的实现流程
(1) 确定迭代次数,将每次迭代的角度计算出来,预先定义为参数,为了避免浮点运算,将角度值向左移位16位,取整数部分。
(2) 根据迭代公式进行迭代计算,本设计取16次迭代,从上表可以看出,当迭代次数越大时,1/∏cosθi会趋向于一个确定值。如果对结果精度要求更高,可以设置更高的迭代次数,根据迭代次数,可以将伸缩因子KN = 1/∏cosθi计算出来。同样将其左移16位。
xi+1 = xi - di * yi * 2^-i
yi+1 = yi + di * xi * 2^-i
zi+1 = z0 - di * θi
(3) 设置x0 = ∏cosθi,y0 = 0,则求出x16 = cosθ,y16 = sinθ。
这里需要注意的是,我们在进行迭代运算的时候,将2^-i变成移位运算,对于正余弦来说是有正负的,所以在一开始定义的时候,就应该定义成有符号数,Verilog中也可以定义有符号数,最高位表示符号位,定义如下

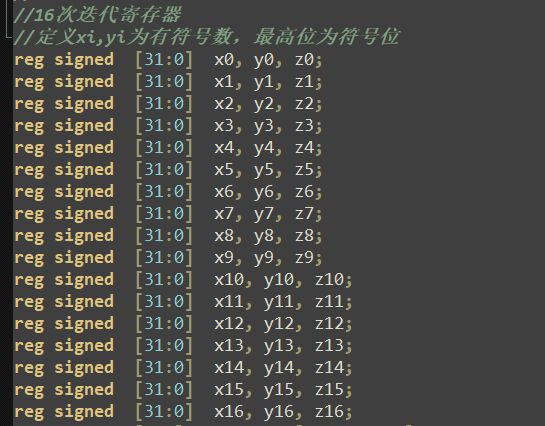
迭代寄存器定义为有符号数,那么我们移位运算就不能用>>逻辑右移<<逻辑左移或来移位了,而是用>>>算术右移和<<<算术左移。逻辑左移也就相当于算数左移,右边统一添0 ,逻辑右移,左边统一添0 ,算数右移,左边添加的数和符号有关。
例如1010_1010, []是添加的位
逻辑左移一位:0101_010[0]
算数左移一位:0101_010[0]
逻辑右移一位:[0]101_0101
算数右移一位:[1]101_0101
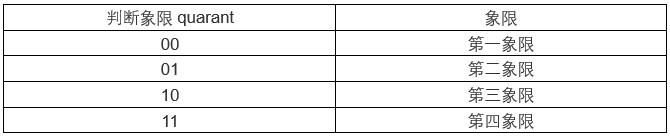
迭代运算采用16级流水线,进行运算,最终需要判断输出的正余弦值在哪个象限,前面讲旋转角度θ的范围为[-99.7,99.7],不在这个范围我们要进行三角运算使其满足这个范围,当输入的角度小于90度即可进行计算,当输入角度大于90度小于180度,将输入角度减去90度并设定当前角度处于第二象限,然后进行计算,当输入角度大于180度小于270度,将输入的角度减去180度设置当前角度处于第三象限,进行计算,当输入的角度大于270度,减去270设置当前角度处于第四象限,进行计算。象限的设定通过quarant寄存器实现。
如果角度在第一象限,sin(x) = sin(a),cos(x) = sin(a)最后的结果x16 = cosθ, y16 = sinθ,这里我想起了那句口诀,一全正,二正弦,三正切,四余弦
如果角度在第二象限,sin(x) = sin(a+90) = cos(a),cos(x) = cos(a+90) = -sin(a)
如果角度在第三象限,sin(x) = sin(a+180) = -sin(a),cos(x) = cos(a+180) = -cos(a)
如果角度在第四象限,sin(x) = sin(a+270) = cos(a),cos(x) = cos(a+270) = -sin(a)
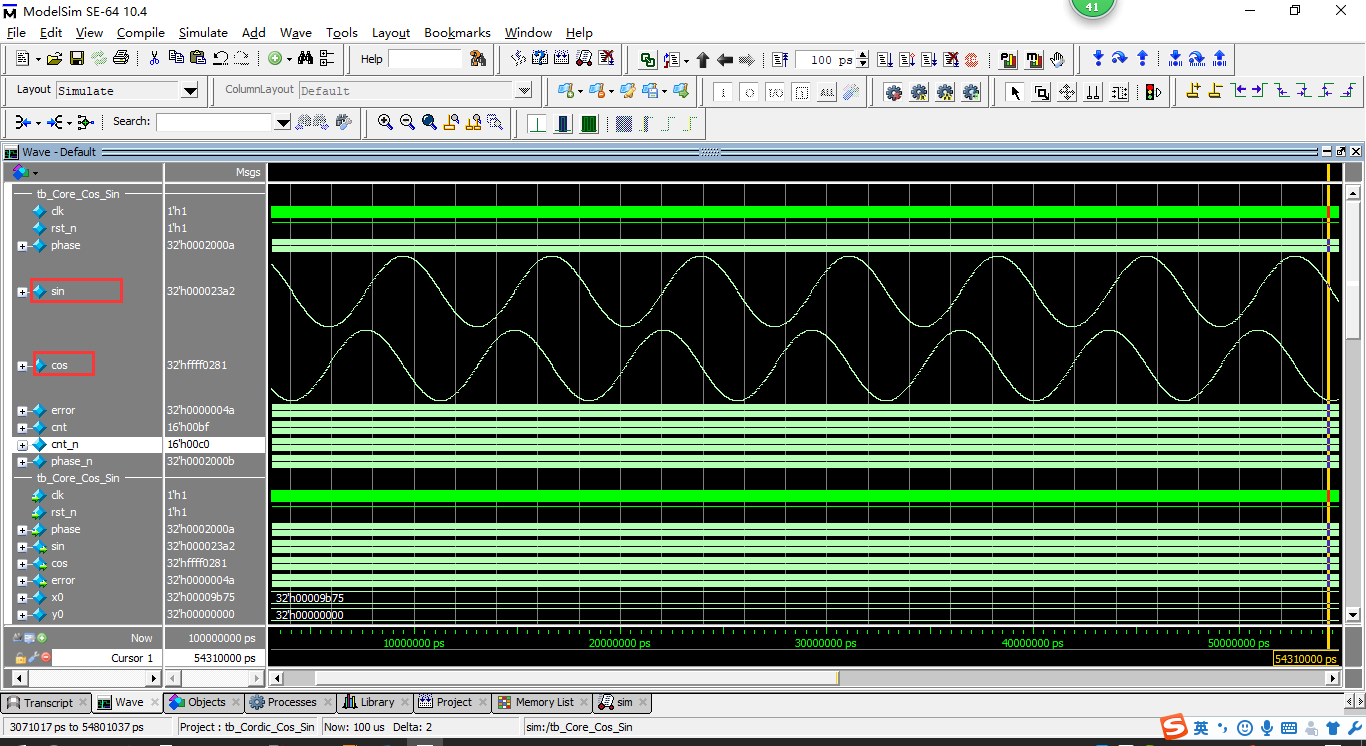
对于正数,我们直接赋值输出,负数,这里使用有符号数表示,将其取反加1即可。最终使用modelsim对算法进行仿真,从波形图上看已经初步实现了sin,cos函数。
向量模式
Cordic算法在向量模式下的计算方法和旋转模式基本上是类似的,设有一点P0(x0, y0),经过顺时针旋转角度到与轴重合,得到点Pm(xm, ym),即ym = 0。
xm = x0cosθ - y0sinθ = cosθ(x0 – y0tanθ)
ym = y0cosθ + x0sinθ = cosθ(y0 – x0tanθ) = 0
我们设置x0 = x, y0 = y, z0 = 0,迭代次数为16,经过16次迭代后得到zn = θ = arctan(y/x)和坐标所代表的向量的模值d = xm = xn * ∏cosθi,di与yi方向相反,即当时结束运算。实现方法为判断yi的符号位,符号位为1,di为1,符号位为0,di为-1。
xi+1 = xi - di * yi * 2^-i
yi+1 = yi + di * xi * 2^-i
zi+1 = z0 - di * θi
关于反正切函数,由于在[-99.7°,99.7°]范围内,所以我们输入向量P0(x0, y0)时,需要保证其在第一、四象限。
下面是使用MATLAB计算出来的数据和FPGA计算出来的数据进行比较。

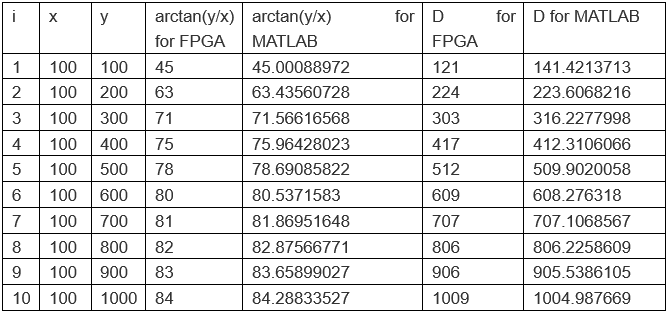
从FPGA计算出的结果与MATLAB来比较,和实际结果之间的误差还是挺小的,毕竟是硬件计算出来的数据,向量的误差就比较大了,如果对于精度比较高的计算,我们可以通过提高迭代次数来提高精度。至此基于FPGA的Cordic算法就实现结束了。
如果你想获得本设计所有的工程源码和参考资料,欢迎关注博主的微信订阅号【开源FPGA】,后台回复【开源FPGA】即可获得!总结、记录自己的学习过程,一个FPGA工程师的养成之路。欢迎加入开源FPGA-交流群-I进行讨论,群号码:677163633。
参考资料:

转载请注明出处:NingHeChuan(宁河川)
个人微信订阅号:开源FPGA
如果你想及时收到个人撰写的博文推送,可以扫描左边二维码(或者长按识别二维码)关注个人微信订阅号
知乎ID:NingHeChuan
微博ID:NingHeChuan
原文地址:http://www.cnblogs.com/ninghechuan/p/8681006.html
基于FPGA的Cordic算法实现的更多相关文章
- 基于FPGA的cordic算法的verilog初步实现
最近在看cordic算法,由于还不会使用matlab,真是痛苦,一系列的笔算才大概明白了这个算法是怎么回事.于是尝试用verilog来实现.用verilog实现之前先参考软件的程序,于是先看了此博文h ...
- FPGA之CORDIC算法实现_代码实现(下)
关于FPGA之CORDIC算法的纯逻辑实现,博主洋葱洋葱“https://www.cnblogs.com/cofin/p/9188629.html”以及善良的一休军“https://blog.csdn ...
- 基于FPGA的RGB565_YCbCr_Gray算法实现
前面我们讲了基于FPGA用VGA显示一副静态图片,那么接下来我们就接着前面的工程来实现我们图像处理的基础算法里最简单的一个那就是彩色图像转灰度的实现. 将彩色图像转化为灰度的方法有两种,一个是令RGB ...
- FPGA之CORDIC算法实现_理论篇(上)
关于cordic的算法原理核心思想就是规定好旋转角度,然后通过不停迭代逐步逼近的思想来实现数学求解,网上关于这部分的资料非常多,主要可以参考: 1)https://blog.csdn.net/qq_3 ...
- 基于FPGA的中值滤波算法实现
在这一篇开篇之前,我需要解决一个问题,上一篇我们实现了基于FPGA的均值滤波算法的实现,最后的显示效果图上发现有一些黑白色的斑点,我以为是椒盐噪声,然后在做基于FPGA的中值滤波算法的实验时,我发现黑 ...
- 基于FPGA的腐蚀膨胀算法实现
本篇文章我要写的是基于的腐蚀膨胀算法实现,腐蚀膨胀是形态学图像处理的基础,,腐蚀在二值图像的基础上做"收缩"或"细化"操作,膨胀在二值图像的基础上做" ...
- 基于FPGA的肤色识别算法实现
大家好,给大家介绍一下,这是基于FPGA的肤色识别算法实现. 我们今天这篇文章有两个内容一是实现基于FPGA的彩色图片转灰度实现,然后在这个基础上实现基于FPGA的肤色检测算法实现. 将彩色图像转化为 ...
- 基于FPGA的Sobel边缘检测的实现
前面我们实现了使用PC端上位机串口发送图像数据到VGA显示,通过MATLAB处理的图像数据直接是灰度图像,后面我们在此基础上修改,从而实现,基于FPGA的动态图片的Sobel边缘检测.中值滤波.Can ...
- 【转】基于FPGA的Sobel边缘检测的实现
前面我们实现了使用PC端上位机串口发送图像数据到VGA显示,通过MATLAB处理的图像数据直接是灰度图像,后面我们在此基础上修改,从而实现,基于FPGA的动态图片的Sobel边缘检测.中值滤波.Can ...
随机推荐
- Caused by: Unable to locate parent package [json-default] for [class com.you.user.action.StudentActi
1.错误描述 信息: Choosing bean (struts) for (com.opensymphony.xwork2.util.TextParser) 2014-7-13 1:52:04 or ...
- Regex 正则替换指定范围全部字符串
1.正则替换字符-------------------------------------------------------------------------------------------- ...
- SDL显示文字
前面教程里,我们只显示图片,没提到如何显示文字, SDL本身没有显示文字功能,它需要用扩展库SDL_ttf来显示文字.ttf是True Type Font的缩写,ttf是Windows下的缺省字体,它 ...
- ArgumentError: Error #1063: BasicChart/dataFunc() 的参数数量不匹配。应该有 2 个,当前为 3 个。
1.错误描述 ArgumentError: Error #1063: BasicChart/dataFunc() 的参数数量不匹配.应该有 2 个,当前为 3 个. at mx.charts.char ...
- 芝麻HTTP:Ansible扩展
Ansible简介 Ansible是由Python开发的一个运维工具,因为工作需要接触到Ansible,经常会集成一些东西到Ansible,所以对Ansible的了解越来越多. 那Ansible到底是 ...
- pat1121-1131
1121 #include<cmath> #include<map> #include<iostream> #include<cstring> #inc ...
- dependencies 与 devDependencies 的区别
dependencies 与 devDependencies 的区别 在使用 npm install 安装 npm 包时,有两种命令参数可以把它们的信息写入 package.json 文件: --sa ...
- 戏说java多线程之CyclicBarrier(循环栅栏)的CyclicBarrier(int parties)构造方法
CyclicBarrier是JDK 1.5 concurrent包出现的一个用于解决多条线程阻塞,当达到一定条件时一起放行的一个类.我们先来看这样一个简单的需求. 现在我有一个写入数据的类,继承Run ...
- 【CJOJ P1365】最短路
http://oj.changjun.com.cn/problem/detail/pid/1365 Description 给出N个点,M条无向边的简单图,问所有点对之间的最短路. Input 第1行 ...
- 【BZOJ1477】青蛙的约会(拓展欧几里得)
[BZOJ1477]青蛙的约会(拓展欧几里得) 题面 题目描述 两只青蛙在网上相识了,它们聊得很开心,于是觉得很有必要见一面.它们很高兴地发现它们住在同一条纬度线上,于是它们约定各自朝西跳,直到碰面为 ...