一、 DM6446 GPIO的介绍
说到LINUX 驱动移植,没有移植过的朋友,或刚刚进入LINUX领域的朋友,最好去看看《LINUX 设备驱动程序》第三版,有个理论或感性的认识。该版本是基于2.6.10的基础上描述的,经典读物,网上有电子版,但是建议花几十元买本书是值得的。
GPIO是嵌入式系统最简单、最常用的资源了,比如点亮LED,控制蜂鸣器,输出高低电平,检测按键,等等。GPIO分输入和输出,在Montavista linux-2.6.18中,有关GPIO的最底层的寄存器驱动,是在linux-2.6.18_pro500\arch\arm\mach-davinci目录下的gpio.c,这个是寄存器级的驱动,搞过单片机MCU的朋友应该比较熟悉寄存器级的驱动。根据DM6446的芯片DATASHEET,DM6446的GPIO分为3组BANK,BANK01组包括GPIO0~GPIO31,BANK23组包括GPIO32~GPIO63,BANK45组包括GPIO64~GPIO70,由于硬件资源的原因,DM6446并不是GPIO管脚就是纯粹的GPIO脚,GPIO管脚和其他一些标准接口复用相同的引脚,比如SPI和GPIO复用,I2C和GPIO复用等,到底是使用GPIO还是其他接口,在初始化的时候,都需要对PINMUX0和PINMUX1两个寄存器进行设置(见DM6446的芯片DATASHEET第3章),而软件设置则在Montavista linux-2.6.18_pro500\arch\arm\mach-davinci目录下mux_cfg.c和对应的mux.h里。本人这里使用GPIO10、GPIO12、GPIO28,分别对应控制BUZZER、LED1、LED0,所以不需要对mux_cfg.c和mux.h进行修改。我们把这些GPIO应用归入linux字符设备来移植。
二、GPIO源码移植分析
/* drivers/char/davinci_dm644x_gpios.c*/
#include <linux/device.h>
#include <linux/fs.h>
#include <linux/module.h>
#include <linux/errno.h>
#include <linux/kernel.h>
#include <linux/init.h>
#include <linux/platform_device.h>
#include <linux/types.h>
#include <linux/cdev.h>
#include <asm/uaccess.h>
#include <asm/io.h>
#include <asm/arch/hardware.h>
#include <asm/arch/gpio.h>
#define DEVICE_NAME "dm644x_gpios" /*定义设备驱动的名字,或设备节点名称*/
#define GPIO_MAJOR 199 /*使用 cat /proc/devices查看不要和存在的char节点重复*/
/*my app gpio define*/
#define DM644X_GPIO_BUZZER 10 /*GPIO10*/
#define DM644X_GPIO_LED1 12 /*GPIO10*/
#define DM644X_GPIO_LED0 28 /*GPIO10*/
static int davinci_dm644x_gpio_open(struct inode *inode, struct file *file)
{
return 0;/*该函数可以什么都不做,也可以加入类似初始化的设置*/
}
static int davinci_dm644x_gpio_ioctl(
struct inode *inode,
struct file *file,
unsigned int cmd,
unsigned long arg)
{
switch(cmd) /*cmd 表示应用程序传入的led动作,是on 还是off*/
{
case 0: //gpio = 0
if(0==arg) /*arg由自己硬件电路决定使用那些GPIO*/
{
gpio_direction_output(DM644X_GPIO_LED0, 0);/*调用TI linux-2.6.18寄存器驱动*/
}
else if(1==arg)
{
gpio_direction_output(DM644X_GPIO_LED1, 0);
}
else if(2==arg)
{
gpio_direction_output(DM644X_GPIO_BUZZER, 0);
}
else
{
return -EINVAL;
}
break;
case 1: //gpio = 1
if(0==arg)
{
gpio_direction_output(DM644X_GPIO_LED0, 1);
}
else if(1==arg)
{
gpio_direction_output(DM644X_GPIO_LED1, 1);
}
else if(2==arg)
{
gpio_direction_output(DM644X_GPIO_BUZZER, 1);
}
else
{
return -EINVAL;
}
break;
default:
return -EINVAL;
}
}
/*定义驱动设备文件API,在linux系统当中,任何设备都可以当做文件的方式操作,这一点和单片机和MCU有很大差别*/
static const struct file_operations davinci_dm644x_gpio_fileops = {
.owner = THIS_MODULE,
.open = davinci_dm644x_gpio_open,
.ioctl = davinci_dm644x_gpio_ioctl,
};
static int __init davinci_dm644x_gpio_init(void) /*内核初始化会调用该函数*/
{
int ret;
gpio_direction_output(DM644X_GPIO_LED0, 1); //led0 is on
udelay(1);
gpio_direction_output(DM644X_GPIO_LED1, 1); //led1 is on
udelay(1);
gpio_direction_output(DM644X_GPIO_BUZZER, 1); //BUZZER is on
mdelay(500); /*初始化时,buzzer 发出声音500ms*/
gpio_direction_output(DM644X_GPIO_BUZZER, 1); //BUZZER is off
ret = register_chrdev(GPIO_MAJOR, DEVICE_NAME, &davinci_dm644x_gpio_fileops);
if(ret < 0)
{
printk(DEVICE_NAME " register falid!\n");
return ret;
}
printk (DEVICE_NAME" initialized\n");
return ret;
}
static void __exit davinci_dm644x_gpio_exit(void)
{
unregister_chrdev(GPIO_MAJOR, DEVICE_NAME);
}
module_init(davinci_dm644x_gpio_init);
module_exit(davinci_dm644x_gpio_exit);
MODULE_AUTHOR("xxx <>");
MODULE_DESCRIPTION("Davinci DM644x gpio driver");
MODULE_LICENSE("GPL");
这个驱动源码是一种比较老的驱动移植,即register_chrdev(GPIO_MAJOR, DEVICE_NAME, &davinci_dm644x_gpio_fileops),静态分配设备节点,适合linux-2.4.x和linux-2.6.10前的版本,当然也可以在2.6.18及以后的版本使用,现在新的版本char字符设备的移植可以参考davinci_resizer.c、davinci_previewer.c等文件。
上面的初始化函数调用udelay和msdelay,udelay一般适用于一个比较小的delay,如果你填的数大于2000,系统会认为你这个是一个错误的delay函数,因此如果需要2ms以上的delay需要使用mdelay函数。
由于这些delay函数本质上都是忙等待,对于长时间的忙等待意味这无谓的耗费着cpu的资源,因此对于毫秒级的延时,内核提供了msleep,ssleep等函数,这些函数将使得调用它的进程睡眠参数指定的时间。
寄存器级的驱动gpio_direction_output()函数是定义在linux-2.6.18_pro500/arch/arm/mach-davinci/下的gpio.c里,里边还有gpio_direction_input()和GPIO中断函数。
三、修改内核配置文件
在linux-2.6.18_pro500/drivers/char目录下,
修改Kconfig文件,在menu "Character devices"下面,加入
config DAVINCI_DM644X_GPIOS
tristate "Davinci DM644x GPIO GPIOs"
depends on ARCH_DAVINCI
help
This option enables support for LEDs and Buzzer connected to GPIO lines
on Ti Davinci DM644x CPUs, such as the DM6446。
修改Makefile文件,在128行
obj-$(CONFIG_DAVINCI_DM646X_TSIF) += tsif_control.o tsif_data.o下面,加入:
obj-$( DAVINCI_DM644X_GPIOS) += davinci_dm644x_gpios.o
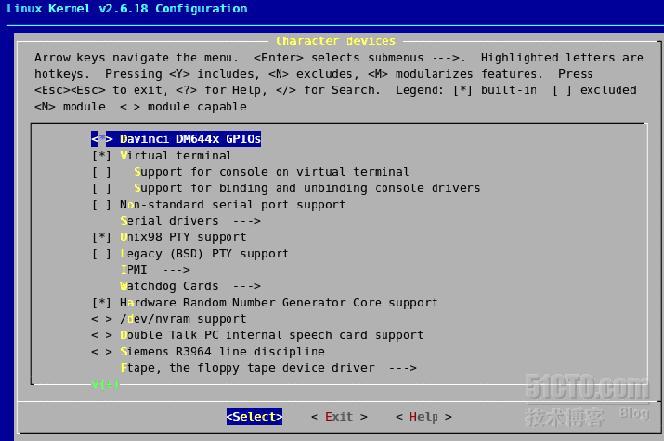
修改linux-2.6.18 内核menu配置
选上“Character devices”里的“Davinci DM644x GPIOs”,保存修改后的配置,然后make uImage,对内核的编译;
四、GPIO应用程序源码
源码添加:
/* dm644x_gpio_test.c*/
#include <stdio.h>
#include <stdlib.h>
#include <unistd.h>
#include <sys/ioctl.h>
/* ./dm644x_gpio_test 0 1 */ //led0 on
/* ./dm644x_gpio_test 0 0 */ //led0 off
/* ./dm644x_gpio_test 1 1 */ //led1 on
/* ./dm644x_gpio_test 1 0 */ //led1 off
/* ./dm644x_gpio_test 2 1 */ // buzzer on
/* ./dm644x_gpio_test 2 0 */ // buzzer off
int main(int argc, char **argv)
{
int on;
int gpio_number;
int fd;
// argv[0]== dm644x_gpio_test
// argv[1]== gpio_number
// argv[1]== on
if (argc != 3 || sscanf(argv[1], "%d", &gpio_number) != 1 || sscanf(argv[2],"%d", &on) != 1 ||on < 0 || on > 1 || gpio _number < 0 || gpio _number > 3)
{
fprintf(stderr, "Usage:\n");
fprintf(stderr, "\t dm644x_gpio_test gpio_number on|off\n");
fprintf(stderr, "Options:\n");
fprintf(stderr, "\t gpio_number from 0 to 2\n");
fprintf(stderr, "\t on 1 off 0\n");
exit(1);
}
fd = open("/dev/dm644x_gpios", 0);
if (fd < 0)
{
perror("open device /dev/dm644x_gpios");
exit(1);
}
ioctl(fd, on, gpio_number);
close(fd);
return 0;
}
Makefile添加:
#application makefile for dm644x gpio test
CROSSCOMPILE = arm_v5t_le-
CC=$(CROSSCOMPILE)gcc
LD=$(CROSSCOMPILE)ld
OBJCOPY=$(CROSSCOMPILE)objcopy
OBJDUMP=$(CROSSCOMPILE)objdump
INCLUDE = /home/user/linux-2.6.18_pro500/include/*指向你的内核include*/
all: dm644x_gpio_test
dm644x_gpio_test: dm644x_gpio_test.c
$(CROSSCOMPILE)gcc -Wall -O2 dm644x_gpio_test.c -I $(INCLUDE) -o dm644x_gpio_test
$(CROSSCOMPILE)strip dm644x_gpio_test
cp -f dm644x_gpio_test /home/user/nfs/target/opt/app/
clean:
@rm -vf dm644x_gpio_test *.o *~
五、文件系统节点添加
文件系统里,/etc/init.d/rcS文件
# Run /etc/rc.d/rc.local if it exists
[ -x /etc/rc.d/rc.local ] && /etc/rc.d/rc.local
前面加mknod /dev/dm644x_gpios c 199 0或在shell命令行下执行mknod /dev/dm644x_gpios c 199 0;这就是静态分配设备节点的做法。
运行系统,进入shell命令下,
#cd / opt/app/
#./ dm644x_gpio_test 0 1可以控制点亮LED0
等等,有平台的朋友可以试试。
六、总结
本人拿一个比较简单的设备驱动移植的例子来讲解,目的让大家理解davinci dm6446系统架构。由于时间仓促,以上可能会有不完善的地方,还请各位网友指点。Davinci dm6446 开发攻略到本章节,基本上一个完整的DM6446系统的框架基本介绍完了,感谢各位网友的支持,dm6446 开发攻略的文章也接近尾声。由于很长一段时间忙着给购买我们产品的客户搭建开发环境、codec环境,开发驱动,调试3G产品等等,所以更新博客的速度放慢下来,毕竟客户的要求才是最重要的。同时也赶在51CTO 5周年纪念日到来之前,结束DM6446开发攻略的主体文章,算是告一个段落,以便为51CTO 5周年纪念写篇感想文章做好铺垫,毕竟来这个圈子也快一年了,有些东西总是需要总结的。