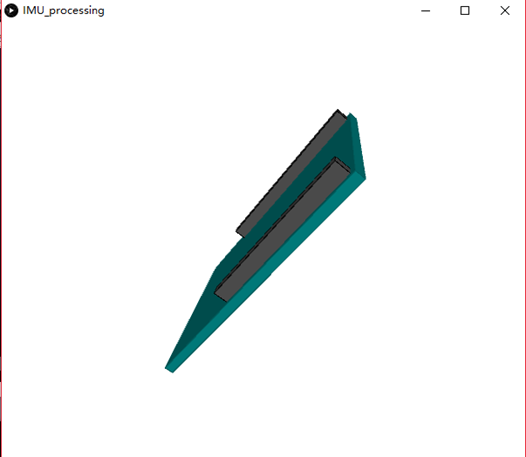
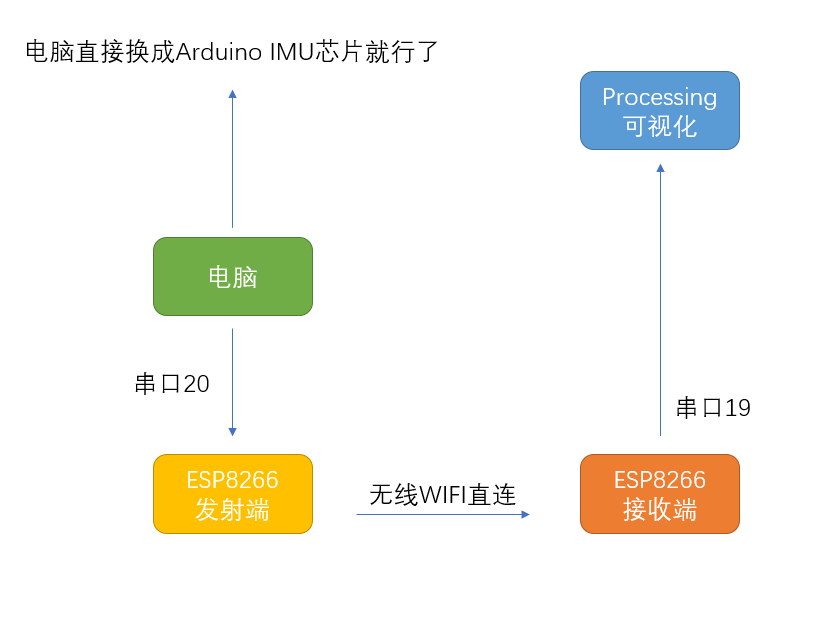
ARDUNIO IMU processing姿态数据可视化
https://www.arduino.cn/thread-42852-1-1.html
关键数据打包
float roll, pitch, heading;
Serial.print("Orientation: ");
Serial.print(heading);
Serial.print(" ");
Serial.print(pitch);
Serial.print(" ");
Serial.println(roll);
接受判断关键 13 ascll码 换行标志位
发射端
#include <ESP8266WiFi.h> const char *ssid = "esp8266_666";
const char *password = "12345678";
WiFiServer server(8266);
void setup()
{
Serial.begin(115200);
Serial.println();
Serial.print("Setting soft-AP ... "); IPAddress softLocal(192,168,1,1);
IPAddress softGateway(192,168,1,1);
IPAddress softSubnet(255,255,255,0); WiFi.softAPConfig(softLocal, softGateway, softSubnet);
WiFi.softAP(ssid, password); IPAddress myIP = WiFi.softAPIP();
Serial.print("AP IP address: ");
Serial.println(myIP);
server.begin();
Serial.printf("Web server started, open %s in a web browser\n", WiFi.localIP().toString().c_str()); }
float roll, pitch, heading;
void loop()
{
WiFiClient client = server.available();
if (client)
{
Serial.println("\n[Client connected]");
while (client.connected())
{ // 将串口数据打印给TCP
if(Serial.available()){
size_t len = Serial.available();
uint8_t sbuf[len];
Serial.readBytes(sbuf, len); client.write(sbuf, len);
delay(1); } roll=roll+10; pitch=pitch+10; heading=heading+10;
Serial.print("Orientation: ");
Serial.print(heading);
Serial.print(" ");
Serial.print(pitch);
Serial.print(" ");
Serial.println(roll); delay(1000); // 将TCP数据打印给串口
if (client.available())
{
// String line = client.readStringUntil(13);// arduino换行符号 ascll码 13
String line = client.readStringUntil('\r');
Serial.println(line); }
}
delay(1); // client.stop();
Serial.println("[Client disonnected]");
} }
接收端
#include <ESP8266WiFi.h> const char* ssid = "esp8266_666";
const char* password = "12345678"; const char* host = "192.168.1.1";
const int httpPort = 8266; IPAddress staticIP(192,168,1,22);
IPAddress gateway(192,168,1,1);
IPAddress subnet(255,255,255,0); WiFiClient client; void setup(void)
{
Serial.begin(115200);
Serial.println(); Serial.printf("Connecting to %s\n", ssid);
WiFi.config(staticIP, gateway, subnet);
WiFi.begin(ssid, password);
while (WiFi.status() != WL_CONNECTED)
{
delay(500);
Serial.print(".");
}
Serial.println();
Serial.print("Connected, IP address: ");
Serial.println(WiFi.localIP()); if (!client.connect(host, httpPort)) {
Serial.println("connection failed");
return;
} } void loop() { // client.print("abc\r");
// delay(1000);
while(client.available()){
//int newLine = 13;
String line = client.readStringUntil(13);//结束标志 换行,新ascll码
// String line = client.readStringUntil('\r');
Serial.println(line);
} }
IMU程序
注意修改波特率
]#include <CurieIMU.h>
#include <MadgwickAHRS.h> Madgwick filter;
unsigned long microsPerReading, microsPrevious;
float accelScale, gyroScale; void setup() {
Serial.begin(115200); // 初始化IMU和滤波器
CurieIMU.begin();
CurieIMU.setGyroRate(25);
CurieIMU.setAccelerometerRate(25);
filter.begin(25); // 设置加速度计测量范围为2G
CurieIMU.setAccelerometerRange(2);
// 设置陀螺仪测量范围为+/-250°/s
CurieIMU.setGyroRange(250); // 初始化用于调整更新速率的变量
microsPerReading = 1000000 / 25;
microsPrevious = micros(); //陀螺仪校准
Serial.print("Starting Gyroscope calibration and enabling offset compensation...");
CurieIMU.autoCalibrateGyroOffset();
Serial.println(" Done"); //加速度计校准
Serial.print("Starting Acceleration calibration and enabling offset compensation...");
CurieIMU.autoCalibrateAccelerometerOffset(X_AXIS, 0);
CurieIMU.autoCalibrateAccelerometerOffset(Y_AXIS, 0);
CurieIMU.autoCalibrateAccelerometerOffset(Z_AXIS, 1);
Serial.println(" Done");
} void loop() {
int aix, aiy, aiz;
int gix, giy, giz;
float ax, ay, az;
float gx, gy, gz;
float roll, pitch, heading;
unsigned long microsNow; // 按设定读取频率,读取数据并更新滤波器
microsNow = micros();
if (microsNow - microsPrevious >= microsPerReading) { // 读取IMU原始数据
CurieIMU.readMotionSensor(aix, aiy, aiz, gix, giy, giz); // convert from raw data to gravity and degrees/second units
ax = convertRawAcceleration(aix);
ay = convertRawAcceleration(aiy);
az = convertRawAcceleration(aiz);
gx = convertRawGyro(gix);
gy = convertRawGyro(giy);
gz = convertRawGyro(giz); // 更新滤波器,并进行相关运算
filter.updateIMU(gx, gy, gz, ax, ay, az); // 获取并输出AHRS姿态数据
roll = filter.getRoll();
pitch = filter.getPitch();
heading = filter.getYaw();
Serial.print("Orientation: ");
Serial.print(heading);
Serial.print(" ");
Serial.print(pitch);
Serial.print(" ");
Serial.println(roll); // 计时
microsPrevious = microsPrevious + microsPerReading;
}
} float convertRawAcceleration(int aRaw) {
float a = (aRaw * 2.0) / 32768.0;
return a;
} float convertRawGyro(int gRaw) {
float g = (gRaw * 250.0) / 32768.0;
return g;
}
上位机processing可视化
注意修改波特率和串口
myPort = new Serial(this, "COM19", 115200);
import processing.serial.*;
Serial myPort; float yaw = 0.0;
float pitch = 0.0;
float roll = 0.0; void setup()
{
size(600, 500, P3D); // if you have only ONE serial port active
//myPort = new Serial(this, Serial.list()[0], 9600); // if you have only ONE serial port active // if you know the serial port name
myPort = new Serial(this, "COM19", 115200); // Windows
//myPort = new Serial(this, "/dev/ttyACM0", 9600); // Linux
//myPort = new Serial(this, "/dev/cu.usbmodem1217321", 9600); // Mac textSize(16); // set text size
textMode(SHAPE); // set text mode to shape
} void draw()
{
serialEvent(); // read and parse incoming serial message
background(255); // set background to white
lights(); translate(width/2, height/2); // set position to centre pushMatrix(); // begin object float c1 = cos(radians(roll));
float s1 = sin(radians(roll));
float c2 = cos(radians(pitch));
float s2 = sin(radians(pitch));
float c3 = cos(radians(yaw));
float s3 = sin(radians(yaw));
applyMatrix( c2*c3, s1*s3+c1*c3*s2, c3*s1*s2-c1*s3, 0,
-s2, c1*c2, c2*s1, 0,
c2*s3, c1*s2*s3-c3*s1, c1*c3+s1*s2*s3, 0,
0, 0, 0, 1); drawArduino(); popMatrix(); // end of object // Print values to console
print(roll);
print("\t");
print(pitch);
print("\t");
print(yaw);
println();
} void serialEvent()
{
int newLine = 13; //13 new line character in ASCII
String message;
do {
message = myPort.readStringUntil(newLine); // read from port until new line
if (message != null) {
String[] list = split(trim(message), " ");
if (list.length >= 4 && list[0].equals("Orientation:")) {
yaw = float(list[1]); // convert to float yaw
pitch = float(list[2]); // convert to float pitch
roll = float(list[3]); // convert to float roll
}
}
} while (message != null);
} void drawArduino()
{
/* function contains shape(s) that are rotated with the IMU */
stroke(0, 90, 90); // set outline colour to darker teal
fill(0, 130, 130); // set fill colour to lighter teal
box(300, 10, 200); // draw Arduino board base shape stroke(0); // set outline colour to black
fill(80); // set fill colour to dark grey translate(60, -10, 90); // set position to edge of Arduino box
box(170, 20, 10); // draw pin header as box translate(-20, 0, -180); // set position to other edge of Arduino box
box(210, 20, 10); // draw other pin header as box
}
ARDUNIO IMU processing姿态数据可视化的更多相关文章
- 基于Processing的数据可视化
虽然数据可视化领域有很多成熟.界面友好.功能强大的软件产品(例如Tableau.VIDI.NodeXL等),但是借助Processing我们可以基于Java语言框架进行丰富多元的可视化编程,熟悉了Pr ...
- 动态可视化 数据可视化之魅D3,Processing,pandas数据分析,科学计算包Numpy,可视化包Matplotlib,Matlab语言可视化的工作,Matlab没有指针和引用是个大问题
动态可视化 数据可视化之魅D3,Processing,pandas数据分析,科学计算包Numpy,可视化包Matplotlib,Matlab语言可视化的工作,Matlab没有指针和引用是个大问题 D3 ...
- 数据可视化之Processing【1】
说Processing之前得先说一下数据可视化. 数据可视化--顾名思义.是关于数据之视觉表现形式的研究,将数据用其它方式表现出来,使之更直观, 更清晰,更easy分析和处理.常见的表达方式如word ...
- 地理数据可视化:Simple,Not Easy
如果要给2015年的地理信息行业打一个标签,地理大数据一定是其中之一.在信息技术飞速发展的今天,“大数据”作为一种潮流铺天盖地的席卷了各行各业,从央视的春运迁徙图到旅游热点预测,从大数据工程师奇货可居 ...
- 数据可视化的优秀入门书籍有哪些,D3.js 学习资源汇总
习·D3.js 学习资源汇总 除了D3.js自身以外,许多可视化工具包都是基于D3开发的,所以对D3的学习就显得很重要了,当然如果已经有了Javascript的经验,学起来也会不费力些. Github ...
- 数据可视化之 tick_params( 参数 )
参考:https://blog.csdn.net/helunqu2017/article/details/78736554/ 初学数据可视化,遇到了tick_params() 里面传参数问题,找了一些 ...
- 4款开源免费的数据可视化JavaScript库
概述:交互式数据可视化在很大程度上取决于JavaScript库的任务能力.在这篇文章中,我们将看看四个JavaScript库:D3,InfoVis,Processing.js,和Recline.js. ...
- 超级干货 :一文读懂数据可视化 ZT
前言 数据可视化,是指将相对晦涩的的数据通过可视的.交互的方式进行展示,从而形象.直观地表达数据蕴含的信息和规律. 早期的数据可视化作为咨询机构.金融企业的专业工具,其应用领域较为单一,应用形态较为保 ...
- PoPo数据可视化周刊第3期 - 台风可视化
9月台风席卷全球,本刊特别选取台风最佳可视化案例,数据可视化应用功力最深厚者,当属纽约时报,而传播效果最佳的是The Weather Channel关于Florence的视频预报,运用了数据可视化.可 ...
随机推荐
- 洛谷P5022 旅行 题解
前面几个代码都是部分分代码,最后一个才是AC了的,所以最后一个有详细注释 安利一发自己的Blog 这是提高组真题,233有点欧拉回路的感觉. 题目大意: 一个 连通 图,双向边 ,无重边 , 访问图中 ...
- Java Annontation 注解的学习和理解
/** * <html> * <body> * <P> Copyright 1994 JsonInternational</p> * <p> ...
- 【高并发解决方案】8、Nginx/LVS/HAProxy负载均衡软件的优缺点详解
PS:Nginx/LVS/HAProxy是目前使用最广泛的三种负载均衡软件,本人都在多个项目中实施过,参考了一些资料,结合自己的一些使用经验,总结一下. 一般对负载均衡的使用是随着网站规模的提升根据不 ...
- VUE基础回顾6
1.ref ref可以直接访问元素,而不需要使用querySelector或者其他dom节点的原生方法. <div ref = "box"></div> 在 ...
- 使用Mimikatz读取密码
法一: https://github.com/gentilkiwi/mimikatz/releases/tag/2.1.1-20170813 第一条:privilege::debug //提升权限 第 ...
- Java文件流下载并提示文件不存在
做文件下载功能的时候,一般使用流的形式下载文件, 如果源文件不存在,下载页面可能就会没有提示,或者一片空白 用户操作之后可能一头雾水,那如何友好提示呢? 想到的有两种 1.可以尝试下载一个名称为:文件 ...
- robotframework Run keyword if ELSE 用法
1.Run keyword if 后面必须跟 关键字 ,可以是你自己的, 也可以是 框架自带的 2.ELSE 必须是大写,
- (二)分布式数据库tidb-事务
tidb既然是分布式数据库,所以它的事务应该可其它数据库事务有着不同的区别.我们来了解下tidb的数据库事务. (一)事物 1.几种数据库的默认隔离级别: tidb是乐观锁 (二)事务语句 TiDB ...
- django admin-过滤器
django框架的admin模块,通过list_filter提供给用户自定义分类查询的接口,并且我们可以在原有类的基础上扩展出符合自身应用场景的过滤器. 定义模型 以 Student 模型为准,管理类 ...
- 关于jupyter notebook密码设置
对于一个jupyter编辑器使用的新手,更换浏览器或者Logout后,需要输入密码进行登陆时 按照网上的教程怎么设置都不行,那么自己整理了一个适用于初学者的操作. 1.windows下,打开命令行,重 ...