你的DDPG/RDPG为何不收敛?
- DDPG不收敛的潜在原因分析
- RDPG不收敛的潜在原因分析(含Github上几个不能收敛的RDPG源码分析)
- D(R)DPG可以收敛的源码(分Keras和pytorch两种版本)
- 强化学习实践(编程)过程的几点建议
一:DDPG不收敛的潜在原因分析
先上DDPG的算法伪代码:
(1)在编写Q(s, a)的过程中,错误的使用了layer.Add层而非layer.concatenate (keras版)或torch.cat (pytorch版)
会导致不收敛的critic代码如下:
- #程序清单1
1 from keras.layers import Add- 2 #如下代码定义了critic网络
- 3 def _build_critic(self, featureDim, actionDim, learningRate=LR_C):
- 4 stateInputs = Input(shape = (featureDim, ), name = 'State-Input')
- 5 actionInput = Input(shape = (actionDim, ), name = 'Action-Input')
- 6 stateOut = Dense(30, activation = 'relu')(stateInputs)
- 7 actionOut = Dense(30, activation = 'relu')(actionInput)
- 8 Outputs = Add()([stateOut, actionOut])
- 9 init = RandomUniform(minval = -0.003, maxval = 0.003)
- 10 Outputs = Dense(1, activation = 'linear', name = 'Q-Value', kernel_initializer = init)(Outputs)
- 11 critic = Model(inputs = [stateInputs, actionInput], outputs = Outputs)
12 return critic
不收敛原因的分析:写代码的时候一定要多想想Q(s, a)的本质是什么?Q(s, a)的本质是多键值的联合查表,即采用s和a作为键值在一个表格中查表,只不过这个表格用神经网络替代了。也就是说,作为键值,s和a一定要分别单独给出,而不能加在一起然后再给神经网络。
可以收敛的critic写法如下(Keras版):
- #程序清单2
1 from keras.layers import concatenate- 2
- 3 def _build_critic(self, featureDim, actionDim, learningRate=LR_C):
- 4
- 5 sinput = Input(shape=(featureDim,), name='state_input')
- 6 ainput = Input(shape=(actionDim,), name='action_input')
- 7 s = Dense(40, activation='relu')(sinput)
- 8 a = Dense(40, activation='relu')(ainput)
- 9 x = concatenate([s, a])
- 10 x = Dense(40, activation='relu')(x)
- 11 output = Dense(1, activation='linear')(x)
- 12
- 13 model = Model(inputs=[sinput, ainput], outputs=output)
- 14 model.compile(loss='mse', optimizer=Adam(lr=learningRate))
- 15
- 16 return model
(2)如果采用PyTorch编写actor神经网络,有一点要注意(经笔者实验,只有PyTorch有这个问题,Keras的coder可以放心的跳过这一节了)
使用PyTorch尽量不要使用Lambda层,实验结果上来看它似乎非常影响收敛性。尽管Keras上使用Lambda层不影响收敛性。
会导致收敛过程很坎坷甚至不收敛的actor代码如下:
- #程序清单3
1 class Actor(torch.nn.Module):- 2 def __init__(self, s_dim, a_dim):
- 3 super(Actor, self).__init__()
- 4 self.Layer1 = torch.nn.Linear(s_dim, 30) # Input layer
- 5 self.Layer2 = torch.nn.Linear(30, 30)
- 6 self.Layer3 = torch.nn.Linear(30, a_dim)
- 7 self.relu = torch.nn.ReLU()
- 8 self.tanh = torch.nn.Tanh()
- 9
- 10 def forward(self, s_input):
- 11 out = self.relu(self.Layer1(s_input)) # linear output
- 12 out = self.relu(self.Layer2(out))
- 13 out = self.tanh(self.Layer3(out))
- 14 out = Lambda(lambda x: x * 2)(out)
- 15 return out
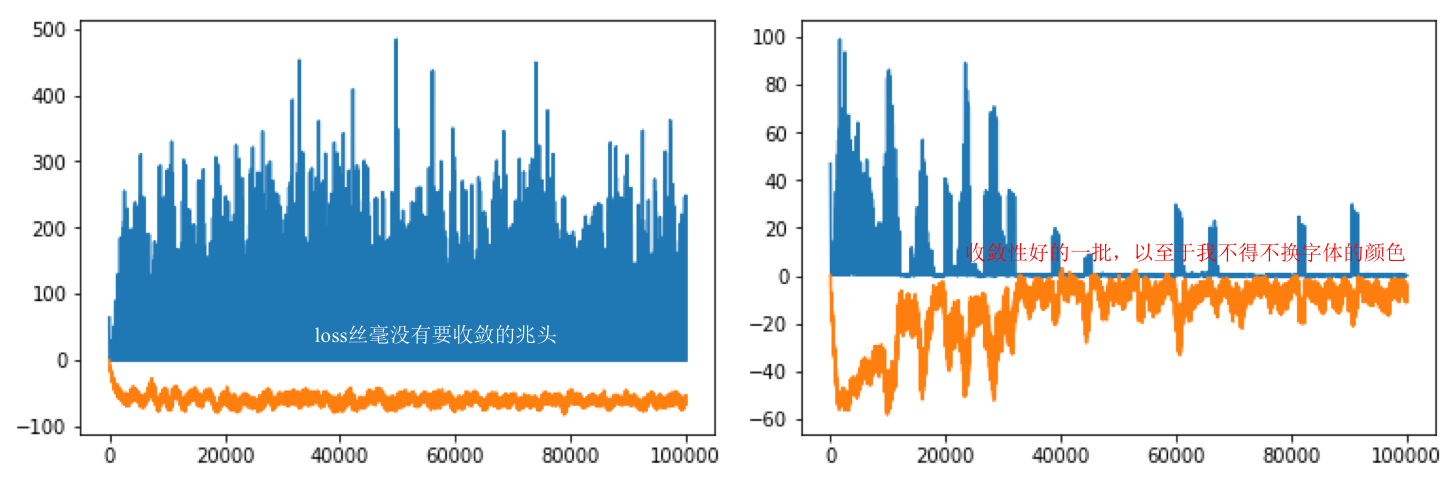
注意到程序的第14行引用了Lambda层,笔者当时解决的问题是“Pendulum-v0”,对于该问题,合法的动作空间是[-2, 2]之间的。而13行的tanh输出在[-1, 1]之间。所以需要把13行的输出乘以2。但是笔者发现,这种写法收敛的过程相较不采用Lambda层而直接将out乘以2(代码之后给出)输出收敛的更慢,并且收敛的过程会被反复破坏然后再收敛,如下图:

上图的蓝线表示critic_loss, 橘线表示实时动作-状态值函数的预测输出。可以从上图(左)看到,在PyTorch中采用Lambda层规范动作值使得critic对动作-状态值函数的预测难以收敛,这表示它对critic的预测带来了负面的影响,总是不断的破坏critic的收敛性。上图(右)的代码如程序清单4中所示。直接将上一层网络的输出乘以2而没有使用Lambda层。可见critic的预测可以逐渐趋近于0(对于Pendulum-v0这是收敛,其他环境不趋于0),收敛性也好了很多。
可以收敛的actor写法如下:
- #程序清单4
1 class Actor(torch.nn.Module):- 2 def __init__(self, s_dim, a_dim):
- 3 super(Actor, self).__init__()
- 4
- 5 self.l1 = torch.nn.Linear(s_dim, 40)
- 6 self.l2 = torch.nn.Linear(40, 30)
- 7 self.l3 = torch.nn.Linear(30, a_dim)
- 8
- 9 def forward(self, x):
- 10 x = F.relu(self.l1(x))
- 11 x = F.relu(self.l2(x))
- 12 x = 2 * torch.tanh(self.l3(x))
- 13 return x
(3)如果采用PyTorch编写critic神经网络,有一点要注意(经笔者实验,也是只有PyTorch有这个问题,Keras的coder可以放心的跳过这一节了)
在编写Q(s, a)的时候,s和a一定要在一开始输入神经网络的时候就做连接操作(上文提到的concatenate)而不要让s和a分别经过一层神经网络后再做连接操作。否则,critic会不收敛。
会导致不收敛的critic代码如下:
- #程序清单5
1 class Critic(torch.nn.Module):- 2 def __init__(self, s_dim, a_dim):
- 3 super(Critic, self).__init__()
- 4 self.Layer1_s = torch.nn.Linear(s_dim, 30)
- 5 self.Layer1_a = torch.nn.Linear(a_dim, 30)
- 6 self.Layer2 = torch.nn.Linear(30+30, 30)
- 7 self.Layer3 = torch.nn.Linear(30, 1)
- 8 self.relu = torch.nn.ReLU()
- 9
- 10 def forward(self, s_a):
- 11 s, a = s_a
- 12 out_s = self.relu(self.Layer1_s(s))
- 13 out_a = self.relu(self.Layer1_a(a))
- 14 out = self.relu(self.Layer2(torch.cat([out_s, out_a], dim=-1)))
- 15 out = self.Layer3(out)
- 16 return out
上图的蓝线表示critic_loss, 橘线表示实时动作-状态值函数的预测输出。上图(左)是程序清单5运行的结果输出。上图(右)是程序清单6运行的结果输出。
可以收敛的critic写法如下:
- #程序清单6
1 class Critic(torch.nn.Module):- 2 def __init__(self, s_dim, a_dim):
- 3 super(Critic, self).__init__()
- 4
- 5 self.l1 = torch.nn.Linear(s_dim + a_dim, 40)
- 6 self.l2 = torch.nn.Linear(40 , 30)
- 7 self.l3 = torch.nn.Linear(30, 1)
- 8
- 9 def forward(self, x_u):
- 10 x, u = x_u
- 11 x = F.relu(self.l1(torch.cat([x, u], 1)))
- 12 x = F.relu(self.l2(x))
- 13 x = self.l3(x)
- 14 return x
你的DDPG/RDPG为何不收敛?的更多相关文章
- 强化学习(十六) 深度确定性策略梯度(DDPG)
在强化学习(十五) A3C中,我们讨论了使用多线程的方法来解决Actor-Critic难收敛的问题,今天我们不使用多线程,而是使用和DDQN类似的方法:即经验回放和双网络的方法来改进Actor-Cri ...
- 深度强化学习:Policy-Based methods、Actor-Critic以及DDPG
Policy-Based methods 在上篇文章中介绍的Deep Q-Learning算法属于基于价值(Value-Based)的方法,即估计最优的action-value function $q ...
- 强化学习调参技巧二:DDPG、TD3、SAC算法为例:
1.训练环境如何正确编写 强化学习里的 env.reset() env.step() 就是训练环境.其编写流程如下: 1.1 初始阶段: 先写一个简化版的训练环境.把任务难度降到最低,确保一定能正常训 ...
- 【算法总结】强化学习部分基础算法总结(Q-learning DQN PG AC DDPG TD3)
总结回顾一下近期学习的RL算法,并给部分实现算法整理了流程图.贴了代码. 1. value-based 基于价值的算法 基于价值算法是通过对agent所属的environment的状态或者状态动作对进 ...
- DNS解析过程和域名收敛、域名发散、SPDY应用
前段时间项目要做域名收敛,糊里糊涂的完成了,好多原理不清晰,现在整理搜集下知识点. 域名收敛的目的是什么?简单来说就是域名解析慢.那为什么解析慢?且听下文慢慢道来. 什么是DNS? DNS( Doma ...
- 非Animal呢?为何不写个万用类
/*4.非Animal呢?为何不写个万用类 * 类Object是JAVA里多有类的源头/父类*/ import java.util.*; class Animalb{ String name; voi ...
- Hadoop之为何不使用RAID?
一.引言: 在一次和同事的讨论中遇到一个这样的问题:有一个hadoop集群,在hbase的put数据出现瓶颈,他们想要把datanode上的磁盘做成RAID 0(比如10块磁盘做成一个RAID 0), ...
- 再论EM算法的收敛性和K-Means的收敛性
标签(空格分隔): 机器学习 (最近被一波波的笔试+面试淹没了,但是在有两次面试时被问到了同一个问题:K-Means算法的收敛性.在网上查阅了很多资料,并没有看到很清晰的解释,所以希望可以从K-Mea ...
- FPGA高级设计——时序分析和收敛(转)
何谓静态时序分析(Static Timing Analysis,简称STA)? 它可以简单的定义为:设计者提出一些特定的时序要求(或者说是添加特定的时序约束),套用特定的时序模型,针对特定的电路进行分 ...
- 收敛 p75
三种收敛.中心极限定理.大数定理.delta方法
随机推荐
- springboot+vue+elementui实现文件上传下载删除DEMO
说明 前面搜索了几个关于springboot+vue+elementui上传下载的文章,感觉写的都不尽如人意.要么是功能不完善,不好用.再者就是源码提供的实在差劲,都不完整.一气之下,自己搞了一个实用 ...
- Java定时器(Timer)
1.介绍 Timer和TimerTask是用于在后台线程中调度任务的java util类.简单地说,TimerTask是要执行的任务,Timer是调度器. 2.调度一次性任务 2.1 指定延迟后执行 ...
- Oracle dump函数
DUMP 语法 DUMP(expr[, return_fmt [, start_position [, length ] ] ] ) 用途 DUMP returns a VARCHAR2 value ...
- 推荐两个网络复用相关的 Go pkg: cmux smux
推荐两个网络复用相关的 Go pkg: cmux/smux 只写一下如何使用,不对实现进行大量描述,两个库的代码都比较精炼,花一会看一下就行. cmux 对端口进行复用,单端口可以建立不同协议的连接( ...
- C++ 多线程的错误和如何避免(5)
要记得对加锁的临界区解锁 前提:在多个线程共享一块资源或者数据时,我们需要加上互斥锁来保护临界区(否则出现数据未定义的行为) 问题:我们往往在写了很多代码之后忘记 unlock 互斥锁,那么等待该资源 ...
- 深入理解Go语言(08):sync.WaitGroup源码分析
一.sync.WaitGroup简介 1.1 sync.WaitGroup 解决了什么问题 在编程的时候,有时遇到一个大的任务,为了提高计算速度,会用到并发程序,把一个大的任务拆分成几个小的独立的任务 ...
- 深入理解Go语言(03):scheduler调度器 - 基本介绍
一:什么是调度 平常我们在生活中会有哪些调度的例子呢?比如十字路口的红绿灯,它就是一种调度系统.在交通十字路口,每个路口上多多少少有一些车辆,为了限制这些车辆不随意行驶,就建起了红绿灯调度系统.红绿灯 ...
- 细说Spring框架之核心01-概述
官网:https://spring.io/projects/spring-framework 文档:https://docs.spring.io/spring-framework/docs/curre ...
- JavaScript的引入并执行-包含动态引入与静态引入
JavaScript的引入并执行-包含动态引入与静态引入 JavaScript引入方式 html文件需要引入JavaScript代码,才能在页面里使用JavaScript代码. 静态引入 行内式 直接 ...
- TCP Server and Client Demo
server.go package main import ( "bufio" "fmt" "io" "net" &qu ...