Introduction to 3D Game Programming with DirectX 12 学习笔记之 --- 第三章:变换
原文:Introduction to 3D Game Programming with DirectX 12 学习笔记之 --- 第三章:变换
学习目标
- 理解如何用矩阵表示线性变换和仿射变换;
- 学习在坐标系中缩放,旋转和移动几何体;
- 学习利用矩阵的乘法合并几个变换矩阵;
- 学习如何在坐标系之间转换,并且表示为转换矩阵;斜体样式
- 学习如何利用DirectX Math库提供的方法构造转换矩阵。
1 线性转换
1.1 线性转换的定义
现在有方程τ(v)=τ(x,y,z)=τ(x1,y1,z1)τ(v) = τ(x, y, z) = τ(x^1, y^1, z^1)τ(v)=τ(x,y,z)=τ(x1,y1,z1),当且仅当它满足下列属性的时候:
我们称它为一个线性变换。其中u和v是3D向量,k是标量。
例如定义τ(v)=τ(x,y,z)=τ(x2,y2,z2)τ(v) = τ(x, y, z) = τ(x^2, y^2, z^2)τ(v)=τ(x,y,z)=τ(x2,y2,z2);τ(1, 2, 3) = (1, 4, 9);这个方程不是线性的,因为如果k = 2和u = (1, 2, 3):τ(ku) = τ(2, 4, 6) = (4, 16, 36),但是kτ(u) = 2(1, 4, 9) = (2, 8, 18)
所以不符合性质2,如果它是线性的,它应该符合:
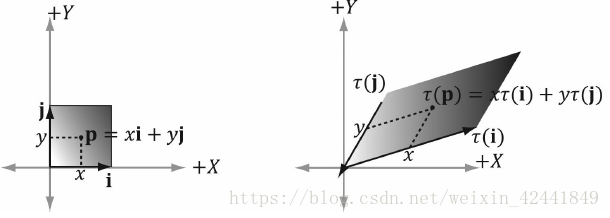
1.2 矩阵表示
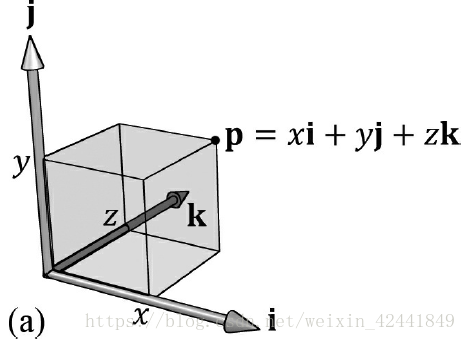
令u = (x, y, z)我们可以把它写成如下形式:
u=(x,y,z)=xi+yj+zk=x(1,0,0)+y(0,1,0)+z(0,0,1)u = (x, y, z) = xi + yj + zk = x(1, 0, 0) + y(0, 1, 0) + z(0, 0, 1)u=(x,y,z)=xi+yj+zk=x(1,0,0)+y(0,1,0)+z(0,0,1)
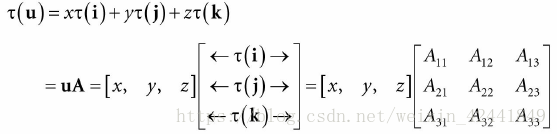
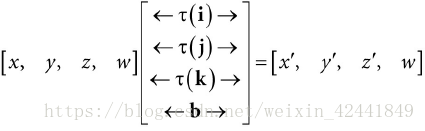
其中向量i = (1, 0, 0), j = (0, 1, 0), k = (0, 0, 1),是坐标系轴方向的单位向量,它们分别被称为R3R^3R3的标准基本向量,现在令τ为一个线性变换,它具备下面性质:
那么它可以被写成向量和矩阵相乘的形式:
其中

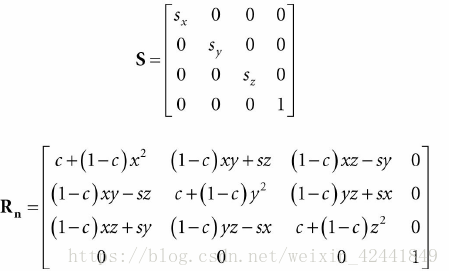
1.3 缩放
我们使用下面的公式来定义缩放:
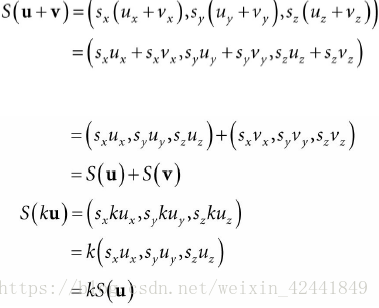
S(x,y,z)=(sxx,syy,szz)S(x, y, z) = (s_xx, s_yy, s_zz)S(x,y,z)=(sxx,syy,szz)
它是物体在x轴方向缩放sxs_xsx倍,在y轴和z轴同理;我们现在要证明S 是一个线性转换:
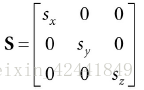
为了得到矩阵表现,我们把S应用到每个标准基本向量中,然后把结果放到矩阵的每一行中:
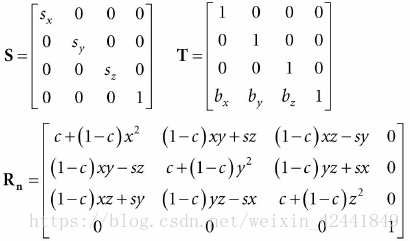
所以S的矩阵表现为:
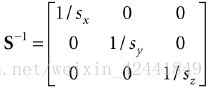
我们称这个矩阵为缩放矩阵,其逆矩阵为:

1.4 旋转
这一节我们描述将一个向量V关于轴n旋转θ角度;其中角度是当我们看向n轴时的顺时针方向,并且||n|| = 1:
首先将v分解为2部分:平行于n(projn(v)proj_n(v)projn(v))和垂直于n(perpn(v)perp_n(v)perpn(v));因为n是一个单位向量,所以projn(v)=(n⋅v)nproj_n(v) = (n \cdot v)nprojn(v)=(n⋅v)n;值得注意的是projn(v)proj_n(v)projn(v)是平行于n的,它在旋转的过程中不变,所以我们只需要关注垂直那部分如果旋转,即旋转向量的结果就等于:Rn(v)=projn(v)+Rn(perpn(v))R_n(v) = proj_n(v) + R_n(perp_n(v))Rn(v)=projn(v)+Rn(perpn(v));
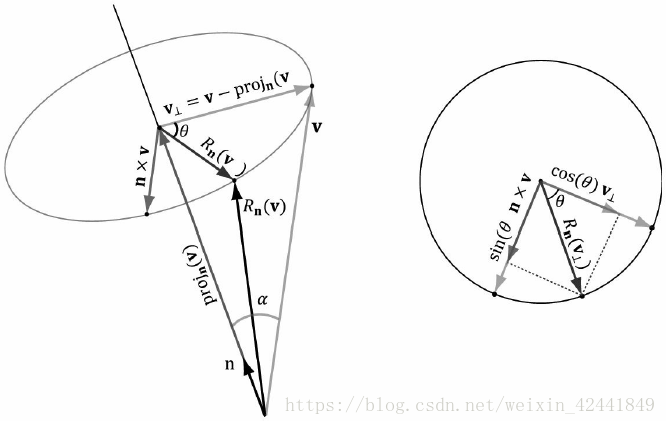
为了计算Rn(perpn(v))R_n(perp_n(v))Rn(perpn(v)),我们在旋转的平面上构建一个2D坐标系,首先使用perpn(v)perp_n(v)perpn(v)为第一个引用向量,为了得到第二个引用向量,我们使用叉积得到一个同时垂直于v和n的向量n×vn \times vn×v,根据之前第一章练习14证明的公式(α是n和v之间的夹角):
∣∣n×v∣∣=∣∣n∣∣∣∣v∣∣sina=∣∣v∣∣sina=∣∣∣perpn(v)∣||n \times v|| = ||n||||v||sina = ||v||sina = |||perp_n(v)|∣∣n×v∣∣=∣∣n∣∣∣∣v∣∣sina=∣∣v∣∣sina=∣∣∣perpn(v)∣
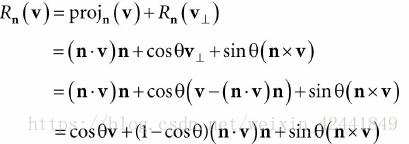
所以所有引用向量的长度都是一样的,并且都是同一个园的半径,现在我们可以建立起他们之间的联系,得到公式如下:

进一步,可以得到旋转公式:
然后根据1.2中的公式,将上述线性变换转成矩阵(其中c为cosθ,s为sinθ):
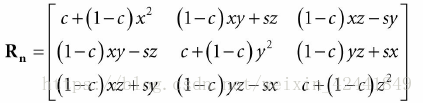
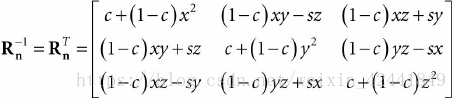
旋转矩阵有一个有趣的性质,它每一行的向量都是单位长度,并且互相垂直,所以它的行向量们是标准正交的;一个矩阵的行向量们标准正交的话,该矩阵称为标准正交矩阵。标准正交矩阵有一个很吸引人的性质:它的逆矩阵等于它的转置矩阵,所以:
通常来说,标准正交矩阵是非常值得使用的,因为它的逆矩阵可以很简单和高效的计算出来。
在特殊情况下,如果我们要围绕x,y,z轴旋转,我们可以得到下列矩阵:

2 仿射变换
2.1 齐次坐标系
在下一节中,我们将看到仿射变换其实是线性变换结合位移;位移不适用于向量,因为向量只表示方向和长度,其次坐标系中提供了一个计数方法可以点和向量的变化一致:
1、使用(x, y, z, 0)表示向量(w = 0可以保证向量在变化中不进行位移);
2、使用(x, y, z, 0)表示点。
2.2 矩阵表示的定义
一个仿射变换是一个线性变化加一个位移变化:
a(u)=τ(u)+ba(u) = τ(u) + ba(u)=τ(u)+b
或者用矩阵表示:
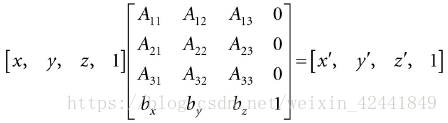
如果我们使用w = 1来扩展到齐次坐标系,那么可以使用更简洁的写法:
这个4 x 4矩阵就是仿射变换的矩阵表示,如果是针对向量,不想做位移操作,只需要把第四行w设置为0即可。

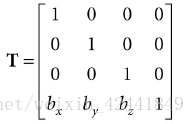
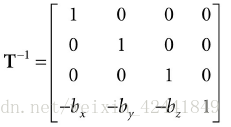
2.3 位移
位移矩阵:
位移矩阵的逆矩阵:
2.4 仿射矩阵的缩放和旋转
2.5 仿射矩阵变换的几何解释
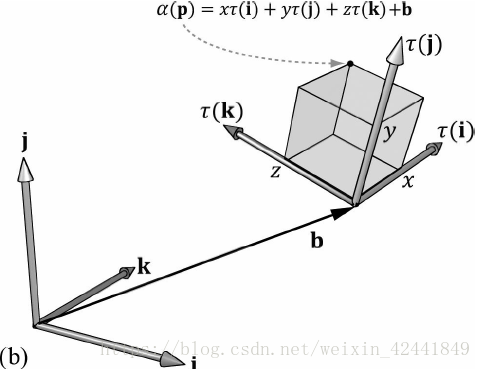
令τ是一个旋转变换,b是一个平移变换,那么这个变换就可以描述为一个仿射变换:

用其次坐标系(对于顶点w=1,对向量w=0)的矩阵表示为:
我们可以看到τ只是旋转了每一个标准分向量i,j和k;α(x, y, z) = xτ(i) + yτ(j) + zτ(k) + b,向量b只是平移了每一个顶点:
相同的思路也可以解释缩放变换:
3 变换的结合
假设S是一个缩放矩阵,R是一个旋转矩阵,T是一个平移矩阵;如果我们要对一个具有8个顶点的立方体做如何变换,最显而易见的方法是一步一步变换:

因为矩阵的乘法具有结合律,所以:
我们可以设C = SRT为一个同时封装了3个变换的矩阵。

4 坐标系变换
在3D计算机图形学中,我们需要使用到多个坐标系和坐标系之间的变换,对于顶点和向量的坐标系变幻是不同的。
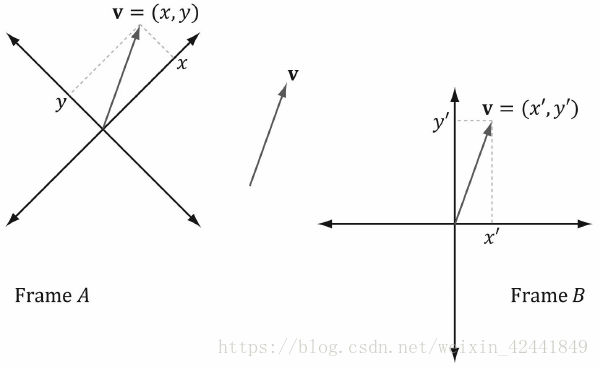
4.1 向量
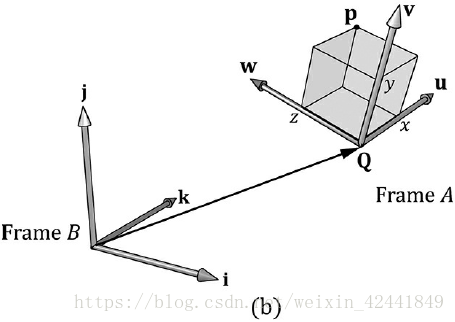
下图中,有两个坐标系A和B,与一个向量P。
很明显 p = xu + yv,其中u和v是坐标系A中,x和y方向上的单位向量;那么PBP_BPB就可以解释为PB=xuB+yvBP_B = xu_B + yv_BPB=xuB+yvB;所以,如果我们知道uB=(ux,uy)u_B = (u_x, u_y)uB=(ux,uy)和vB=(vx,vy)v_B = (v_x, v_y)vB=(vx,vy),那么我们就可以计算出pB=(x′,y′)p_B = (x', y')pB=(x′,y′)。
扩展到3D情况:

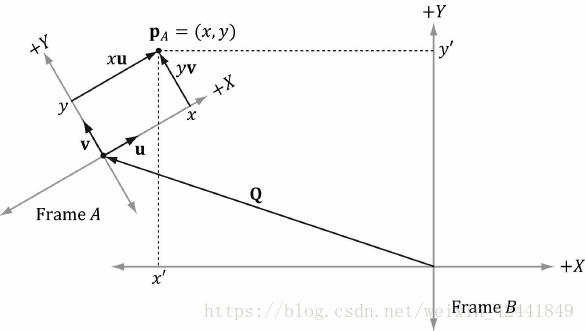
4.2 点
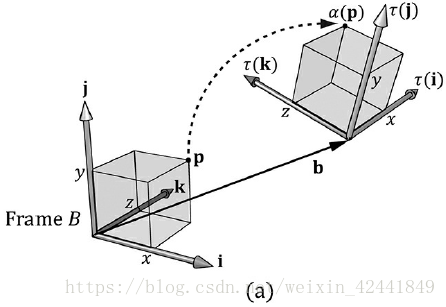
点的变换和向量有一点不同,点的位置很重要,如下图:
P点在坐标系A中可以表示为p = xu + yv + Q,那么在B坐标系中可以表示为PB=xuB+yvB+QBP_B = xu_B + yv_B + Q_BPB=xuB+yvB+QB;所以,如果我们知道uB=(ux,uy)u_B = (u_x, u_y)uB=(ux,uy)、vB=(vx,vy)v_B = (v_x, v_y)vB=(vx,vy)和QB=(Qx,Qy)Q_B = (Q_x, Q_y)QB=(Qx,Qy),那么我们就可以计算出pB=(x′,y′)p_B = (x', y')pB=(x′,y′)。
扩展到3D的情况:
4.3 矩阵的表示
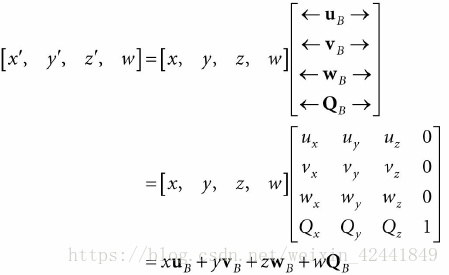
在齐次坐标系下:

那么矩阵表示如下:
我们称上述矩阵为一个坐标系变换矩阵,它将坐标系A变换到坐标系B。
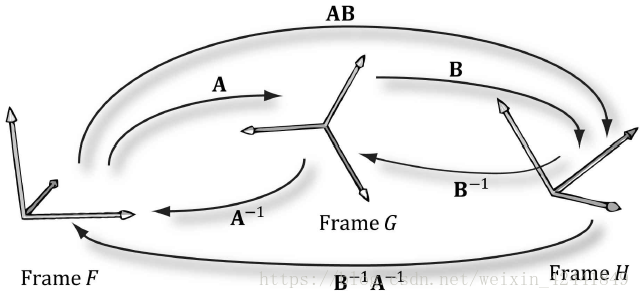
4.4 坐标系变换矩阵的结合律
假设我们有3个坐标你F,G,H;矩阵A可以从F变换到G,矩阵B可以从G变换到H;我们希望将向量p从F变换到H,最显而易见的方法就是一步一步变换:
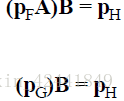
根据矩阵的乘法结合律:
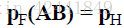
在这种情况下,矩阵C= AB可以将p直接从F坐标系变换到H坐标系。(再次提醒,矩阵的乘法不支持交换律)
4.5 坐标系变换矩阵的逆矩阵
假设我们有一个在B坐标系的向量p,我们有从坐标系A变换到B的矩阵M,如果将P变换到坐标系A,乘以M的逆矩阵就可以了:
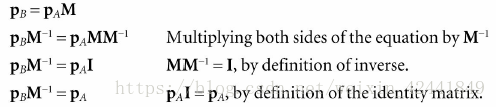
在本书中提到的坐标系变换映射都是可逆的,所以不需要担心是否存在逆矩阵。
5 变换矩阵 vs 坐标系变换矩阵
变换矩阵和坐标系变换矩阵是相同的,变化矩阵可以被解释为一个坐标系变换矩阵,反之亦然。
6 DIRECTX MATH 中的变换函数
在DIRECTX MATH中与变换函数相关的总结如下:
// Constructs a scaling matrix:
XMMATRIX XM_CALLCONV XMMatrixScaling(
float ScaleX,
float ScaleY,
float ScaleZ); // Scaling factors
// Constructs a scaling matrix from components in vector:
XMMATRIX XM_CALLCONV XMMatrixScalingFromVector(
FXMVECTOR Scale); // Scaling factors (sx, sy, sz)
// Constructs a x-axis rotation matrix Rx:
XMMATRIX XM_CALLCONV XMMatrixRotationX(
float Angle); // Clockwise angle θ to rotate
// Constructs a y-axis rotation matrix Ry:
XMMATRIX XM_CALLCONV XMMatrixRotationY(
float Angle); // Clockwise angle θ to rotate
// Constructs a z-axis rotation matrix Rz:
XMMATRIX XM_CALLCONV XMMatrixRotationZ(
float Angle); // Clockwise angle θ to rotate
// Constructs an arbitrary axis rotation matrix Rn:
XMMATRIX XM_CALLCONV XMMatrixRotationAxis(
FXMVECTOR Axis, // Axis n to rotate about
float Angle); // Clockwise angle θ to rotate
// Constructs a translation matrix:
XMMATRIX XM_CALLCONV XMMatrixTranslation(
float OffsetX,
float OffsetY,
float OffsetZ); // Translation factors
// Constructs a translation matrix from components in a vector:
XMMATRIX XM_CALLCONV XMMatrixTranslationFromVector(
FXMVECTOR Offset); // Translation factors (tx, ty, tz)
// Computes the vector-matrix product vM where vw = 1 for transforming points:
XMVECTOR XM_CALLCONV XMVector3TransformCoord(
FXMVECTOR V, // Input v
CXMMATRIX M); // Input M
// Computes the vector-matrix product vM where vw = 0 for transforming vectors:
XMVECTOR XM_CALLCONV XMVector3TransformNormal(
FXMVECTOR V, // Input v
CXMMATRIX M); // Input M
最后两个函数XMVector3TransformCoord和XMVector3TransformNormal,你不需要手动设置w = 0还是1,因为函数中会强制设置w的值。
7 本章总结
- 基础的变换矩阵:旋转,缩放和平移矩阵公式如下:
- 我们使用4x4矩阵表示变换;用1x4齐次坐标系来描述顶点和向量,其第四个值w,对于顶点为1,对于向量为0;
- 一个矩阵如果其4行向量都是单位向量并且相互垂直,则该矩阵为正交矩阵;正交矩阵的逆矩阵和它的转置矩阵相等,所以它的逆矩阵计算起来很简单和高效,所有旋转矩阵都是正交矩阵;
- 根据矩阵的乘法结合律,我们可以将多个变换矩阵合成为一个变化矩阵;
- 令uBu_BuB、vBv_BvB、QBQ_BQB和WBW_BWB描述B坐标系下在A坐标系中的值,那么一个在A坐标系下的向量/顶点P,在B坐标系下的值就可以计算为:
- 假设有3个坐标系F,G和H,并且A矩阵从F变换到G,B矩阵从G变换到H;我们可以得到C = AB矩阵从F变换到H;
- 如果矩阵M可以从A坐标系变换到B坐标系,那么M的逆矩阵就可以从B坐标系变换到A坐标系;
- 一个有效的变换可以被解释为坐标系变换,反之亦然。

8 练习题
1、定义如下变换:τ(x, y, z) = (x + y, x – 3, z)。τ是否为线性变换,如果是,找出它的矩阵表示:
2、定义如下变换:τ(x, y, z) = (3x + 4z, 2x – z, x + y + z)。τ是否为线性变换,如果是,找出它的矩阵表示:
3、假设τ是一个线性变换,进一步假设τ(1, 0, 0) = (3, 1, 2), τ(0, 1, 0) = (2, -1, 3), 和 τ(0, 0, 1) = (4, 0, 2);找出τ(1, 1, 1):
4、创建一个缩放矩阵,x轴方向放大2倍,y轴方向放大-3倍,Z轴保持不变:
5、创建一个旋转矩阵,围绕(1, 1, 1)旋转30度:
6、创建一个平移矩阵,x轴方向移动4,y轴方向不变,z轴方向移动-9:
7、创建一个矩阵,先缩放(2, -3, 0),再平移(4, 0, -9):
8、创建一个矩阵,先旋转(0, 45度, 0),再平移(-2, 5, 1):
9、重做例子3.2,这次缩放(1.5, 0.75, 1),并且画图验证结果:
10、重做例子3.3,这次旋转(0,45度,0),并且画图验证结果:
11、重做例子3.4,这次平移(-5, -3, 4),并且画图验证结果:
12、证明Rn(v)=cosθv+(1−cosθ)(n⋅v)n+sinθ(n×v)R_n(v) = cosθv + (1 − cosθ) (n·v)n + sinθ(n × v)Rn(v)=cosθv+(1−cosθ)(n⋅v)n+sinθ(n×v)是线性变换,并且找到他的矩阵表示:
13、证明RyR_yRy是标准正交的,为了更多扩展练习,读者也可以证明基本旋转矩阵也是标准正交的:
14、证明M是标准正交的,有且仅有当MT=M−1M^T = M^{-1}MT=M−1:
15、计算
这些计算移动顶点了吗,移动向量了吗?为什么没有移动向量在坐标系中的位置?
16、证明缩放矩阵的倒转就是它的逆矩阵,用矩阵的乘法表示为:SS−1=S−1S=ISS^{-1} = S^{-1}S = ISS−1=S−1S=I;同样的,证明平移矩阵:
17、假设我们有2个坐标系A和B,在A坐标系下的点p和力q;
令
创建从A坐标系映射到B坐标系的坐标系变换矩阵,并且计算在B坐标系下的p和q,并且画图验证结果:

18、
Introduction to 3D Game Programming with DirectX 12 学习笔记之 --- 第三章:变换的更多相关文章
- Introduction to 3D Game Programming with DirectX 12 学习笔记之 --- 第二十三章:角色动画
原文:Introduction to 3D Game Programming with DirectX 12 学习笔记之 --- 第二十三章:角色动画 学习目标 熟悉蒙皮动画的术语: 学习网格层级变换 ...
- Introduction to 3D Game Programming with DirectX 12 学习笔记之 --- 第二十一章:环境光遮蔽(AMBIENT OCCLUSION)
原文:Introduction to 3D Game Programming with DirectX 12 学习笔记之 --- 第二十一章:环境光遮蔽(AMBIENT OCCLUSION) 学习目标 ...
- Introduction to 3D Game Programming with DirectX 12 学习笔记之 --- 第十七章:拾取
原文:Introduction to 3D Game Programming with DirectX 12 学习笔记之 --- 第十七章:拾取 代码工程地址: https://github.com/ ...
- Introduction to 3D Game Programming with DirectX 12 学习笔记之 --- 第十三章:计算着色器(The Compute Shader)
原文:Introduction to 3D Game Programming with DirectX 12 学习笔记之 --- 第十三章:计算着色器(The Compute Shader) 代码工程 ...
- Introduction to 3D Game Programming with DirectX 12 学习笔记之 --- 第十一章:模板测试
原文:Introduction to 3D Game Programming with DirectX 12 学习笔记之 --- 第十一章:模板测试 代码工程地址: https://github.co ...
- Introduction to 3D Game Programming with DirectX 12 学习笔记之 --- 第七章:在Direct3D中绘制(二)
原文:Introduction to 3D Game Programming with DirectX 12 学习笔记之 --- 第七章:在Direct3D中绘制(二) 代码工程地址: https:/ ...
- Introduction to 3D Game Programming with DirectX 12 学习笔记之 --- 第六章:在Direct3D中绘制
原文:Introduction to 3D Game Programming with DirectX 12 学习笔记之 --- 第六章:在Direct3D中绘制 代码工程地址: https://gi ...
- Introduction to 3D Game Programming with DirectX 12 学习笔记之 --- 第五章:渲染流水线
原文:Introduction to 3D Game Programming with DirectX 12 学习笔记之 --- 第五章:渲染流水线 学习目标 了解几个用以表达真实场景的标志和2D图像 ...
- Introduction to 3D Game Programming with DirectX 12 学习笔记之 --- 第四章:Direct 3D初始化
原文:Introduction to 3D Game Programming with DirectX 12 学习笔记之 --- 第四章:Direct 3D初始化 学习目标 对Direct 3D编程在 ...
随机推荐
- 2019.10.25 csp-s模拟测试87 反思总结
一次非常神奇的考试,考完试以后看着T2的0pts突然笑死我自己 太智障了这什么神奇的题意理解错误23333 T1一眼分类讨论,两眼二分,觉得分类讨论有点玄学但是出题人八成不会卡[何],然后本着对二分的 ...
- 在window下远程虚拟机(centos)hadoop运行mapreduce程序
(注:虽然连接成功但是还是执行不了.以后有时间再解决吧 看到的人别参考仅作个人笔记)先mark下 1.首先在window下载好一个eclipse.和拷贝好linux里面hadoop版本对应的插件(我是 ...
- bzoj 1179 [Apio2009]Atm——SCC缩点+spfa
题目:https://www.lydsy.com/JudgeOnline/problem.php?id=1179 显然SCC缩点. 然后准备倒着拓扑序推到st,结果WA. 听TJ说dj求最长路会发生不 ...
- uni-app开发微信小程序引入UI组件库(Vant-weapp)步骤
uni-app开发微信小程序引入UI组件库(Vant-weapp)步骤 这里以vant-weapp为例 uni-app官方文档介绍引入组件的方法 1. 新建相关目录 根目录下创建 wxcomponen ...
- Crontab 入门
参考网址: http://www.centoscn.com/CentOS/help/2014/0820/3524.html 简单命令 service crond restart //重启crontab ...
- 异步 I/O 和事件驱动
异步IO(asynchronous I/O) 首先来理解几个容易混淆的概念,阻塞IO(blocking I/O)和非阻塞IO(non-blocking I/O),同步IO(synchronous I/ ...
- [待验证]使用hibernate注解忘记引入mapping导致的问题
这个问题好像是注解主键的时候,主键没有设置为int型,我设置了个string(想直接用uuid)导致的 后来学习了一下,这个主键的注解,生成策略有很多种,换成别的,就可以使用string类型 编译报错 ...
- 基于python爬虫的github-exploitdb漏洞库监控与下载
基于python爬虫的github-exploitdb漏洞库监控与下载 offensive.py(爬取项目历史更新内容) #!/usr/bin/env python # -*- coding:utf- ...
- Vue. 之 Element table 高度自适应
Vue. 之 Element table 高度自适应 使用vue创建table后,其高度自适应浏览器高度. 在创建的 el-table 中添加:height属性,其值为一个变量(tableHeight ...
- POJ4852 Ants
Ants Time Limit: 1000MS Memory Limit: 30000K Total Submissions: 20047 Accepted: 8330 Description ...