Sobel边缘检测算法
索贝尔算子(Sobel operator)主要用作边缘检测,在技术上,它是一离散性差分算子,用来运算图像亮度函数的灰度之近似值。在图像的任何一点使用此算子,将会产生对应的灰度矢量或是其法矢量
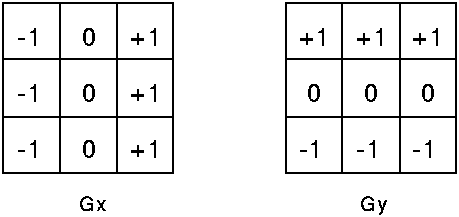
Sobel卷积因子为:
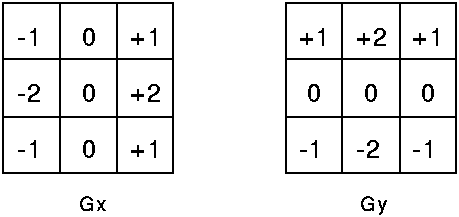
该算子包含两组3x3的矩阵,分别为横向及纵向,将之与图像作平面卷积,即可分别得出横向及纵向的亮度差分近似值。如果以A代表原始图像,Gx及Gy分别代表经横向及纵向边缘检测的图像灰度值,其公式如下:

具体计算如下:
Gx = (-1)*f(x-1, y-1) + 0*f(x,y-1) + 1*f(x+1,y-1)
+(-2)*f(x-1,y) + 0*f(x,y)+2*f(x+1,y)
+(-1)*f(x-1,y+1) + 0*f(x,y+1) + 1*f(x+1,y+1)
= [f(x+1,y-1)+2*f(x+1,y)+f(x+1,y+1)]-[f(x-1,y-1)+2*f(x-1,y)+f(x-1,y+1)]
Gy =1* f(x-1, y-1) + 2*f(x,y-1)+ 1*f(x+1,y-1)
+0*f(x-1,y) 0*f(x,y) + 0*f(x+1,y)
+(-1)*f(x-1,y+1) + (-2)*f(x,y+1) + (-1)*f(x+1, y+1)
= [f(x-1,y-1) + 2f(x,y-1) + f(x+1,y-1)]-[f(x-1, y+1) + 2*f(x,y+1)+f(x+1,y+1)]
其中f(a,b), 表示图像(a,b)点的灰度值;
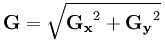
图像的每一个像素的横向及纵向灰度值通过以下公式结合,来计算该点灰度的大小:
通常,为了提高效率 使用不开平方的近似值:
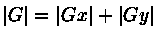
如果梯度G大于某一阀值 则认为该点(x,y)为边缘点。
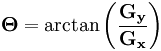
然后可用以下公式计算梯度方向:
Sobel算子根据像素点上下、左右邻点灰度加权差,在边缘处达到极值这一现象检测边缘。对噪声具有平滑作用,提供较为精确的边缘方向信息,边缘定位精度不够高。当对精度要求不是很高时,是一种较为常用的边缘检测方法。
附带知识:
普利维特算子(Prewitt operate):
除sobel边缘检测外 还有Prewitt算子, 它的卷积因子如下:
其他计算 和sobel差不多;
Prewitt算子利用像素点上下、左右邻点灰度差,在边缘处达到极值检测边缘。对噪声具有平滑作用,定位精度不够高。
罗伯茨交叉边缘检测(Roberts Cross operator)
卷积因子如下:
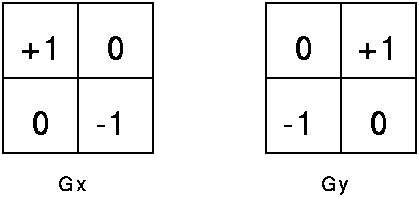
灰度公式为:
近似公式为:
具体计算如下:
G(x,y)=abs(f(x,y)-f(x+1,y+1))+abs(f(x,y+1)-f(x+1,y))
灰度方向 计算公式为:

Roberts算子采用对角线方向相邻两像素之差近似梯度幅值检测边缘。检测水平和垂直边缘的效果好于斜向边缘,定位精度高,对噪声敏感
Sobel边缘检测算法的更多相关文章
- 基于MATLAB的Sobel边缘检测算法实现
图像边缘就是图像灰度值突变的地方,也就是图像在该部分的像素值变化速度非常之快,就比如在坐标轴上一条曲线有刚开始的平滑突然来个大转弯,在变化出的导数非常大. Sobel算子主要用作边缘检测,它是一离散型 ...
- Sobel边缘检测算法(转载)
转载请注明出处: http://blog.csdn.net/tianhai110 索贝尔算子(Sobel operator)主要用作边缘检测,在技术上,它是一离散性差分算子,用来运算图像亮度函数的灰 ...
- 基于Vivado HLS在zedboard中的Sobel滤波算法实现
基于Vivado HLS在zedboard中的Sobel滤波算法实现 平台:zedboard + Webcam 工具:g++4.6 + VIVADO HLS + XILINX EDK + ...
- 基于FPGA的Sobel边缘检测的实现
前面我们实现了使用PC端上位机串口发送图像数据到VGA显示,通过MATLAB处理的图像数据直接是灰度图像,后面我们在此基础上修改,从而实现,基于FPGA的动态图片的Sobel边缘检测.中值滤波.Can ...
- 【算法随记】Canny边缘检测算法实现和优化分析。
以前的博文大部分都写的非常详细,有很多分析过程,不过写起来确实很累人,一般一篇好的文章要整理个三四天,但是,时间越来越紧张,后续的一些算法可能就以随记的方式,把实现过程的一些比较容易出错和有价值的细节 ...
- 【转】基于FPGA的Sobel边缘检测的实现
前面我们实现了使用PC端上位机串口发送图像数据到VGA显示,通过MATLAB处理的图像数据直接是灰度图像,后面我们在此基础上修改,从而实现,基于FPGA的动态图片的Sobel边缘检测.中值滤波.Can ...
- 图像特征提取:Sobel边缘检测
前言 点和线是做图像分析时两个最重要的特征,而线条往往反映了物体的轮廓,对图像中边缘线的检测是图像分割与特征提取的基础.文章主要讨论两个实际工程中常用的边缘检测算法:Sobel边缘检测和Canny边缘 ...
- OpenCV: Canny边缘检测算法原理及其VC实现详解(转载)
原文地址:http://blog.csdn.net/likezhaobin/article/details/6892176 原文地址:http://blog.csdn.net/likezhaobin/ ...
- 数字图像处理之sobel边缘检测
在前两部文章介绍了几种边缘检测算法,和位图的内存结构.如果对前两篇文章已经理解透彻 了,那么本文将带你进入数字图像处理的世界. 本文通过C代码实现基本的sobel边缘检测,包括8个方向和垂直方向: 代 ...
随机推荐
- Lombok 详解
简介 lombok是一个编译级别的插件,它可以在项目编译的时候生成一些代码.通俗的说,lombok可以通过注解来标示生成getter settter等代码. 引入 创建gradle项目 compile ...
- node的定时器
node.schedule(callback, interval, repeat, delay, key);node.unscheduleAllCallbacks(); 最妙的是还能再node的sch ...
- 专访|高思教育创始人须佶成(上)【UncleW】
大家好,我是校长运营圈专栏作者UncleW. 2017年9月,高思教育发布董事会公告,宣布完成5.5亿元人民币融资.成立于2009年的高思教育到今天刚刚8岁,员工人数已突破2000人,2017年共有5 ...
- [ERR] Node goodsleep.vip:6379 is not empty. Either the node already knows other nodes (check with CLUSTER NODES) or contains some key in database 0.
解决方案 以前的cluster节点信息 保留 要删除 dump.rdb node.conf集群启动时自动生成文件
- ubuntu18.04图形模式切换到命令模式
命令模式 :Ctrl+Alt+F5 图形模式:Ctrl+Alt+F1
- 曼孚科技:AI领域3种典型的深度学习算法
深度学习(Deep Learning)是机器学习(Machine Learning)领域中一个新的研究方向,引领了第三次人工智能的浪潮. 本文整理了深度学习领域3种典型的算法,希望可以帮助大家更好地 ...
- H3C链路聚合
以太网链路聚合通过将多条以太网物理链路捆绑在一起形成一条以太网逻辑链路,实现增加链路带宽的目的,同时这些捆绑在一起的链路通过相互动态备份,可以有效地提高链路的可靠性. 一.基本概念 1.聚合接口/聚合 ...
- windows10(家庭版)+ laradock 安装踩坑记一记
Docker 安装: 首先我们需要在系统安装 Docker 的免费社区版,官方提供 Windows.Mac 及 Linux 等版本下载:下载地址.下载操作系统对应版本后,按照引导流程安装,最后打开 D ...
- Python之路Day09
函数 将某个功能封装到一个空间中就是一个函数 减少重复代码 函数体中存放的时代码 定义函数 def len(): def 关键字 len 函数名 -- 变量名 ()格式规定 :语句结束 调用函数 函数 ...
- 机器学习作业(二)逻辑回归——Matlab实现
题目太长啦!文档下载[传送门] 第1题 简述:实现逻辑回归. 第1步:加载数据文件: data = load('ex2data1.txt'); X = data(:, [1, 2]); y = dat ...