电机AB相编码器测速
控制任务
检测编码器的脉冲并测速
电路设计

图1 直流电机带减速器和编码器
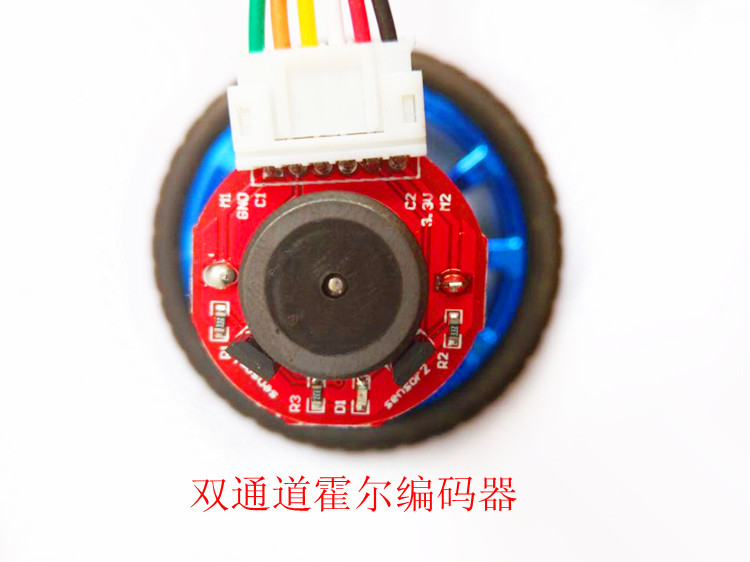
图2 编码器接线定义
编码器接线定义如下
M1:电机电源接口,绿色的
GND:编码器电源负极输入口,橙色的
C1:编码器A相输出,黄色的,接Arduino控制板2号引脚
C2:编码器B相输出,白色的,接Arduino控制板3号引脚
3.3V:编码器电源正极输入口(兼容3.3V、5V),红色的
M2:电机电源接口,黑色的,
程序设计
- 1 int motor_c_ENA=6; //控制板与驱动板的引脚连接
- 2 int motor_c_IN1=8;
- 3 int motor_c_IN2=7;
- 4
- 5 #define ENCODER_A_PIN 2 //编码器A相接控制板2号引脚,对应0号外部中断
- 6 #define ENCODER_B_PIN 3 //编码器B相接控制板3号引脚,
- 7 long pulse_number=0; // 脉冲计数
- 8 int rpm;
- 9
- 10 #include <MsTimer2.h> //定时器库的头文件
- 11
- 12 void setup()
- 13 {
- 14 pinMode(motor_c_ENA,OUTPUT); //电机C使能和PWM调速口
- 15 pinMode(motor_c_IN1,OUTPUT); //电机C控制口
- 16 pinMode(motor_c_IN2,OUTPUT); //电机C控制口
- 17
- 18 MsTimer2::set(500, send); // 中断设置函数,每 500ms 进入一次中断
- 19 MsTimer2::start(); //开始计时
- 20
- 21 pinMode(ENCODER_A_PIN, INPUT);
- 22 pinMode(ENCODER_B_PIN, INPUT);
- 23 attachInterrupt(0, read_quadrature, FALLING); //EN_A脚下降沿触发中断
- 24 Serial.begin(9600); //初始化Arduino串口
- 25 }
- 26
- 27 void loop()
- 28 {
- 29 //C加速正转
- 30 digitalWrite(motor_c_IN1,0);
- 31 digitalWrite(motor_c_IN2,1);
- 32 for (int a=100;a<=255;a++)
- 33 {
- 34 analogWrite(motor_c_ENA,a);
- 35 delay(200);
- 36 }
- 37
- 38 //C减速正转
- 39 digitalWrite(motor_c_IN1,0);
- 40 digitalWrite(motor_c_IN2,1);
- 41 for (int a=255;a>0;a--)
- 42 {
- 43 analogWrite(motor_c_ENA,a);
- 44 delay(200);
- 45 }
- 46 }
- 47
- 48 void send() //速度串行传送
- 49 {
- 50 rpm=int(pulse_number/37.4);
- 51 //编码器精度为224线,减速器减速比为1:20,故系数=(224/(60/0.5))*20=37.4
- 52 Serial.print("rpm: ");
- 53 Serial.println(rpm, DEC);
- 54 pulse_number = 0;
- 55 }
- 56
- 57 void read_quadrature() //编码器脉冲计数中断函数
- 58 {
- 59 if (digitalRead(ENCODER_A_PIN) == LOW)
- 60 {
- 61 if (digitalRead(ENCODER_B_PIN) == LOW) // 查询EN_B的电平以确认正转
- 62 { pulse_number ++; }
- 63 if (digitalRead(ENCODER_B_PIN) == HIGH) // 查询EN_B的电平以确认反转
- 64 { pulse_number --; }
- 65 }
- 66 }
电机AB相编码器测速的更多相关文章
- 通过电机编码器AB相输出确定电机转向
AB相输出相差90度,即当A相"正跳变"时如果B相是高电平那么是"正转",反之是"反转" 图片: 正转 反转 #include <Ti ...
- 伺服驱动器UVW电机电源线相序错误
我们有必要先了解此讨论的前提:编码器初始安装相位正确.伺服驱动器将全然"採信"电机编码器的初始安装相位所表征的电机电角度相位,无需在伺服电机 的UVW动力线接线连接后进行额外 ...
- stm32直流电机驱动与测速代码配套视频资料
说实话就现在的市场应用中stm32已经占到了绝对住到的地位,51已经成为过去式,32的功能更加强大,虽然相应的难度有所增加,但是依然阻止不了大家学习32的脚步,不说大话了这些大家都懂要不然也不会学习s ...
- 不可错过的stm32单片机直流电机驱动与测速详解
stm32直流电机驱动与测速 说实话就现在的市场应用中stm32已经占到了绝对住到的地位,51已经成为过去式,32的功能更加强大,虽然相应的难度有所增加,但是依然阻止不了大家学习32的脚步,不说大话了 ...
- 轻松掌握stm32直流电机驱动与测速
说实话就现在的市场应用中stm32已经占到了绝对住到的地位,51已经成为过去式,32的功能更加强大,虽然相应的难度有所增加,但是依然阻止不了大家学习32的脚步,不说大话了这些大家都懂要不然也不会学习s ...
- stm32直流电机驱动与测速
stm32直流电机驱动与测速 说实话就现在的市场应用中stm32已经占到了绝对住到的地位,51已经成为过去式,32的功能更加强大,虽然相应的难度有所增加,但是依然阻止不了大家学习32的脚步,不说大话了 ...
- [ Arch Linux ] Arch更新源高速源整理之测速并自动排序高速源 加快更新效率
方法一: 工具:rankmirrors 0x01 备份原来的源,并创建一个测试源 cd /etc/pacman.d cp mirrorlist mirrorlist.bakcp mirrorlist ...
- C# Ping的例子,可用于测试网络,延迟xx毫秒 C#编写网站测速
C#编写网站测速 WebClient wcl = new WebClient(); Stopwatch spwatch = new Stopwatch(); spwatch.Start(); byte ...
- linux测速软件speedtest-cli
linux测速软件: https://github.com/sivel/speedtest-cli 以下是我在gentoo上测的
随机推荐
- Android Studio出现:Your project path contains non-ASCII 错误代码解决方法
导入Project的出现: Error:(1, 0) Your project path contains non-ASCII characters. This will most likely ca ...
- 【平台开发】— 2.前端:vue-element-admin
前端我虽然没怎么写过,但也并不陌生.之前做web自动化,网页结构没少看,html,css,js也都断断续续了解过. 如果从空白开始写,肯定还是需要花不少时间的. 好在网上有了不少成熟的后台系统的前端脚 ...
- maven踩过的坑
maven配置 maven默认配置 解决每次打开idea的spring项目都需要重新配置maven,选择file/other settings/preference for new projects ...
- html打印后不刷新当前页
这种方法可以在打印的页面中添加样式,新页面跳转打印 doPrint(ids){ var titleHTML=document.getElementById(ids).innerHTML; var Op ...
- SSM整合+WebUpload使用(spring+springmvc+mybatis+maven)
SSM框架整合以及webupload的集成与使用 在项目中最近用到了webupload.js,也方方面面遇到了不少问题,比如上传文件前对表单参数校验,当校验失败不予提交,及在文件上传成功后,选择同 ...
- OpenvSwitch系列之七 meter表限速
Open vSwitch系列之一 Open vSwitch诞生 Open vSwitch系列之二 安装指定版本ovs Open vSwitch系列之三 ovs-vsctl命令使用 Open vSwit ...
- shell 逻辑判断
|| && 查了 Stack Overflow ||,表示或,从前往后执行,执行第一个真 &&,前者是真才会接着执行 ; 表示接着往下执行,不管前者如何 #!/bin/ ...
- pythont多线程
import threading # 线程模块 def function(num): pass thread_1 = threading.Thread(target=function, args=(1 ...
- Golang多线程简单斗地主
多线程,通道,读写锁(单写多读),随机(洗牌),是本文涉及的主要知识点. 先看一下做出来的效果,因为是实验程序,跟真实的斗地主还是有差距,理解万岁! [发牌员]:洗牌咯. 刷刷刷... [发牌员]:牌 ...
- 数据库连接池设计和实现(Java版本)
1 前言 数据库连接池是目前系统开发必须面对和考虑的问题,原理并不复杂,主要是减少重复连接数据库的代价:在系统中创建预期数量的数据库连接,并将这些连接以一个集合或类似生活中的池一样管理起来,用到的时候 ...