从0开始用python实现神经网络 IMPLEMENTING A NEURAL NETWORK FROM SCRATCH IN PYTHON – AN INTRODUCTION
code地址:https://github.com/dennybritz/nn-from-scratch
文章地址:http://www.wildml.com/2015/09/implementing-a-neural-network-from-scratch/
Get the code: To follow along, all the code is also available as an iPython notebook on Github.
In this post we will implement a simple 3-layer neural network from scratch. We won’t derive all the math that’s required, but I will try to give an intuitive explanation of what we are doing. I will also point to resources for you read up on the details.
Here I’m assuming that you are familiar with basic Calculus and Machine Learning concepts, e.g. you know what classification and regularization is. Ideally you also know a bit about how optimization techniques like gradient descent work. But even if you’re not familiar with any of the above this post could still turn out to be interesting ;)
But why implement a Neural Network from scratch at all? Even if you plan on using Neural Network libraries like PyBrain in the future, implementing a network from scratch at least once is an extremely valuable exercise. It helps you gain an understanding of how neural networks work, and that is essential for designing effective models.
One thing to note is that the code examples here aren’t terribly efficient. They are meant to be easy to understand. In an upcoming post I will explore how to write an efficient Neural Network implementation using Theano. (Update: now available)
GENERATING A DATASET
Let’s start by generating a dataset we can play with. Fortunately, scikit-learnhas some useful dataset generators, so we don’t need to write the code ourselves. We will go with the make_moons function.
# Generate a dataset and plot it
np.random.seed(0)
X, y = sklearn.datasets.make_moons(200, noise=0.20)
plt.scatter(X[:,0], X[:,1], s=40, c=y, cmap=plt.cm.Spectral)
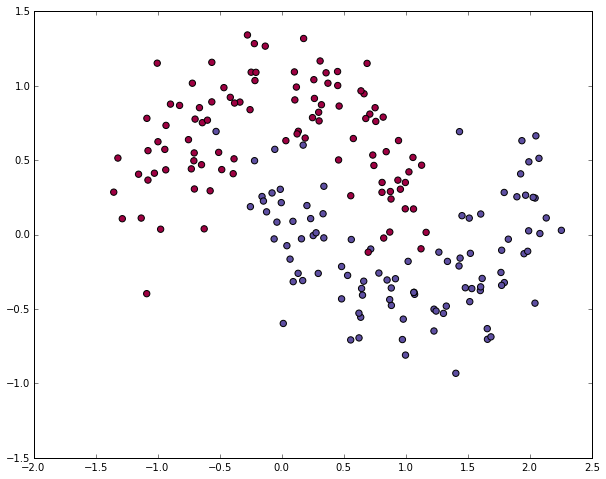
The dataset we generated has two classes, plotted as red and blue points. You can think of the blue dots as male patients and the red dots as female patients, with the x- and y- axis being medical measurements.
Our goal is to train a Machine Learning classifier that predicts the correct class (male of female) given the x- and y- coordinates. Note that the data is not linearly separable, we can’t draw a straight line that separates the two classes. This means that linear classifiers, such as Logistic Regression, won’t be able to fit the data unless you hand-engineer non-linear features (such as polynomials) that work well for the given dataset.
In fact, that’s one of the major advantages of Neural Networks. You don’t need to worry about feature engineering. The hidden layer of a neural network will learn features for you.
LOGISTIC REGRESSION
To demonstrate the point let’s train a Logistic Regression classifier. It’s input will be the x- and y-values and the output the predicted class (0 or 1). To make our life easy we use the Logistic Regression class from scikit-learn.
# Train the logistic rgeression classifier
clf = sklearn.linear_model.LogisticRegressionCV()
clf.fit(X, y) # Plot the decision boundary
plot_decision_boundary(lambda x: clf.predict(x))
plt.title("Logistic Regression")

The graph shows the decision boundary learned by our Logistic Regression classifier. It separates the data as good as it can using a straight line, but it’s unable to capture the “moon shape” of our data.
TRAINING A NEURAL NETWORK
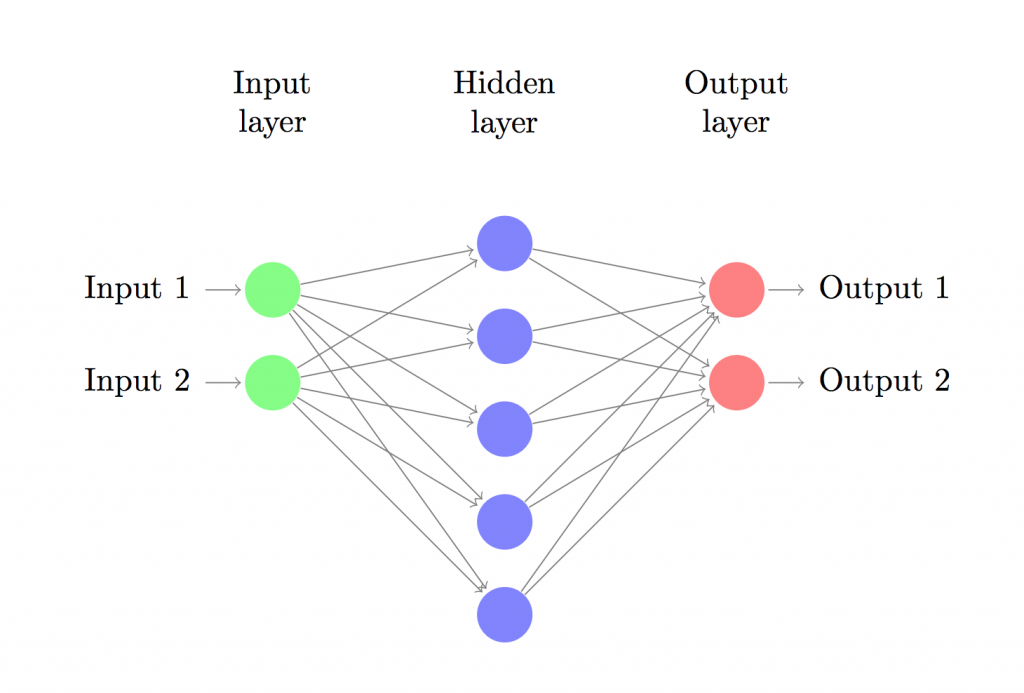
Let’s now build a 3-layer neural network with one input layer, one hidden layer, and one output layer. The number of nodes in the input layer is determined by the dimensionality of our data, 2. Similarly, the number of nodes in the output layer is determined by the number of classes we have, also 2. (Because we only have 2 classes we could actually get away with only one output node predicting 0 or 1, but having 2 makes it easier to extend the network to more classes later on). The input to the network will be x- and y- coordinates and its output will be two probabilities, one for class 0 (“female”) and one for class 1 (“male”). It looks something like this:
We can choose the dimensionality (the number of nodes) of the hidden layer. The more nodes we put into the hidden layer the more complex functions we will be able fit. But higher dimensionality comes at a cost. First, more computation is required to make predictions and learn the network parameters. A bigger number of parameters also means we become more prone to overfitting our data.
How to choose the size of the hidden layer? While there are some general guidelines and recommendations, it always depends on your specific problem and is more of an art than a science. We will play with the number of nodes in the hidden later later on and see how it affects our output.
We also need to pick an activation function for our hidden layer. The activation function transforms the inputs of the layer into its outputs. A nonlinear activation function is what allows us to fit nonlinear hypotheses. Common chocies for activation functions are tanh, the sigmoid function, orReLUs. We will use tanh, which performs quite well in many scenarios. A nice property of these functions is that their derivate can be computed using the original function value. For example, the derivative of 


Because we want our network to output probabilities the activation function for the output layer will be the softmax, which is simply a way to convert raw scores to probabilities. If you’re familiar with the logistic function you can think of softmax as its generalization to multiple classes.
HOW OUR NETWORK MAKES PREDICTIONS
Our network makes predictions using forward propagation, which is just a bunch of matrix multiplications and the application of the activation function(s) we defined above. If x is the 2-dimensional input to our network then we calculate our prediction 









LEARNING THE PARAMETERS
Learning the parameters for our network means finding parameters (



The formula looks complicated, but all it really does is sum over our training examples and add to the loss if we predicted the incorrect class. The further away the two probability distributions
We can use gradient descent to find the minimum and I will implement the most vanilla version of gradient descent, also called batch gradient descent with a fixed learning rate. Variations such as SGD (stochastic gradient descent) or minibatch gradient descent typically perform better in practice. So if you are serious you’ll want to use one of these, and ideally you would alsodecay the learning rate over time.
As an input, gradient descent needs the gradients (vector of derivatives) of the loss function with respect to our parameters: 



Applying the backpropagation formula we find the following (trust me on this):

IMPLEMENTATION
Now we are ready for our implementation. We start by defining some useful variables and parameters for gradient descent:
num_examples = len(X) # training set size
nn_input_dim = 2 # input layer dimensionality
nn_output_dim = 2 # output layer dimensionality # Gradient descent parameters (I picked these by hand)
epsilon = 0.01 # learning rate for gradient descent
reg_lambda = 0.01 # regularization strength
First let’s implement the loss function we defined above. We use this to evaluate how well our model is doing:
# Helper function to evaluate the total loss on the dataset
def calculate_loss(model):
W1, b1, W2, b2 = model['W1'], model['b1'], model['W2'], model['b2']
# Forward propagation to calculate our predictions
z1 = X.dot(W1) + b1
a1 = np.tanh(z1)
z2 = a1.dot(W2) + b2
exp_scores = np.exp(z2)
probs = exp_scores / np.sum(exp_scores, axis=1, keepdims=True)
# Calculating the loss
corect_logprobs = -np.log(probs[range(num_examples), y])
data_loss = np.sum(corect_logprobs)
# Add regulatization term to loss (optional)
data_loss += reg_lambda/2 * (np.sum(np.square(W1)) + np.sum(np.square(W2)))
return 1./num_examples * data_loss
We also implement a helper function to calculate the output of the network. It does forward propagation as defined above and returns the class with the highest probability.
# Helper function to predict an output (0 or 1)
def predict(model, x):
W1, b1, W2, b2 = model['W1'], model['b1'], model['W2'], model['b2']
# Forward propagation
z1 = x.dot(W1) + b1
a1 = np.tanh(z1)
z2 = a1.dot(W2) + b2
exp_scores = np.exp(z2)
probs = exp_scores / np.sum(exp_scores, axis=1, keepdims=True)
return np.argmax(probs, axis=1)
Finally, here comes the function to train our Neural Network. It implements batch gradient descent using the backpropagation derivates we found above.
# This function learns parameters for the neural network and returns the model.
# - nn_hdim: Number of nodes in the hidden layer
# - num_passes: Number of passes through the training data for gradient descent
# - print_loss: If True, print the loss every 1000 iterations
def build_model(nn_hdim, num_passes=20000, print_loss=False): # Initialize the parameters to random values. We need to learn these.
np.random.seed(0)
W1 = np.random.randn(nn_input_dim, nn_hdim) / np.sqrt(nn_input_dim)
b1 = np.zeros((1, nn_hdim))
W2 = np.random.randn(nn_hdim, nn_output_dim) / np.sqrt(nn_hdim)
b2 = np.zeros((1, nn_output_dim)) # This is what we return at the end
model = {} # Gradient descent. For each batch...
for i in xrange(0, num_passes): # Forward propagation
z1 = X.dot(W1) + b1
a1 = np.tanh(z1)
z2 = a1.dot(W2) + b2
exp_scores = np.exp(z2)
probs = exp_scores / np.sum(exp_scores, axis=1, keepdims=True) # Backpropagation
delta3 = probs
delta3[range(num_examples), y] -= 1
dW2 = (a1.T).dot(delta3)
db2 = np.sum(delta3, axis=0, keepdims=True)
delta2 = delta3.dot(W2.T) * (1 - np.power(a1, 2))
dW1 = np.dot(X.T, delta2)
db1 = np.sum(delta2, axis=0) # Add regularization terms (b1 and b2 don't have regularization terms)
dW2 += reg_lambda * W2
dW1 += reg_lambda * W1 # Gradient descent parameter update
W1 += -epsilon * dW1
b1 += -epsilon * db1
W2 += -epsilon * dW2
b2 += -epsilon * db2 # Assign new parameters to the model
model = { 'W1': W1, 'b1': b1, 'W2': W2, 'b2': b2} # Optionally print the loss.
# This is expensive because it uses the whole dataset, so we don't want to do it too often.
if print_loss and i % 1000 == 0:
print "Loss after iteration %i: %f" %(i, calculate_loss(model)) return model
A NETWORK WITH A HIDDEN LAYER OF SIZE 3
Let’s see what happens if we train a network with a hidden layer size of 3.
# Build a model with a 3-dimensional hidden layer
model = build_model(3, print_loss=True) # Plot the decision boundary
plot_decision_boundary(lambda x: predict(model, x))
plt.title("Decision Boundary for hidden layer size 3")
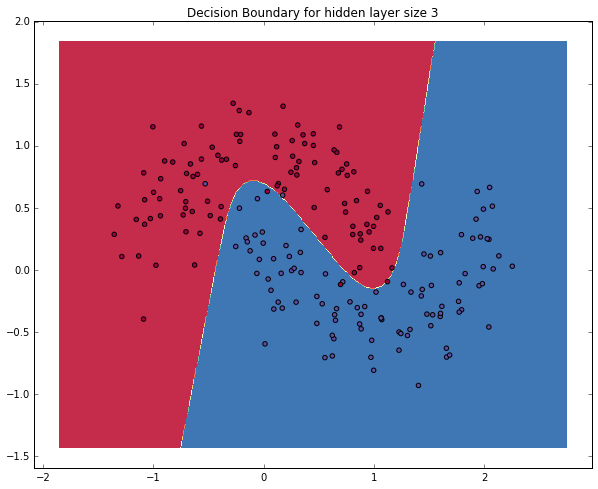
Yay! This looks pretty good. Our neural networks was able to find a decision boundary that successfully separates the classes.
VARYING THE HIDDEN LAYER SIZE
In the example above we picked a hidden layer size of 3. Let’s now get a sense of how varying the hidden layer size affects the result.
plt.figure(figsize=(16, 32))
hidden_layer_dimensions = [1, 2, 3, 4, 5, 20, 50]
for i, nn_hdim in enumerate(hidden_layer_dimensions):
plt.subplot(5, 2, i+1)
plt.title('Hidden Layer size %d' % nn_hdim)
model = build_model(nn_hdim)
plot_decision_boundary(lambda x: predict(model, x))
plt.show()
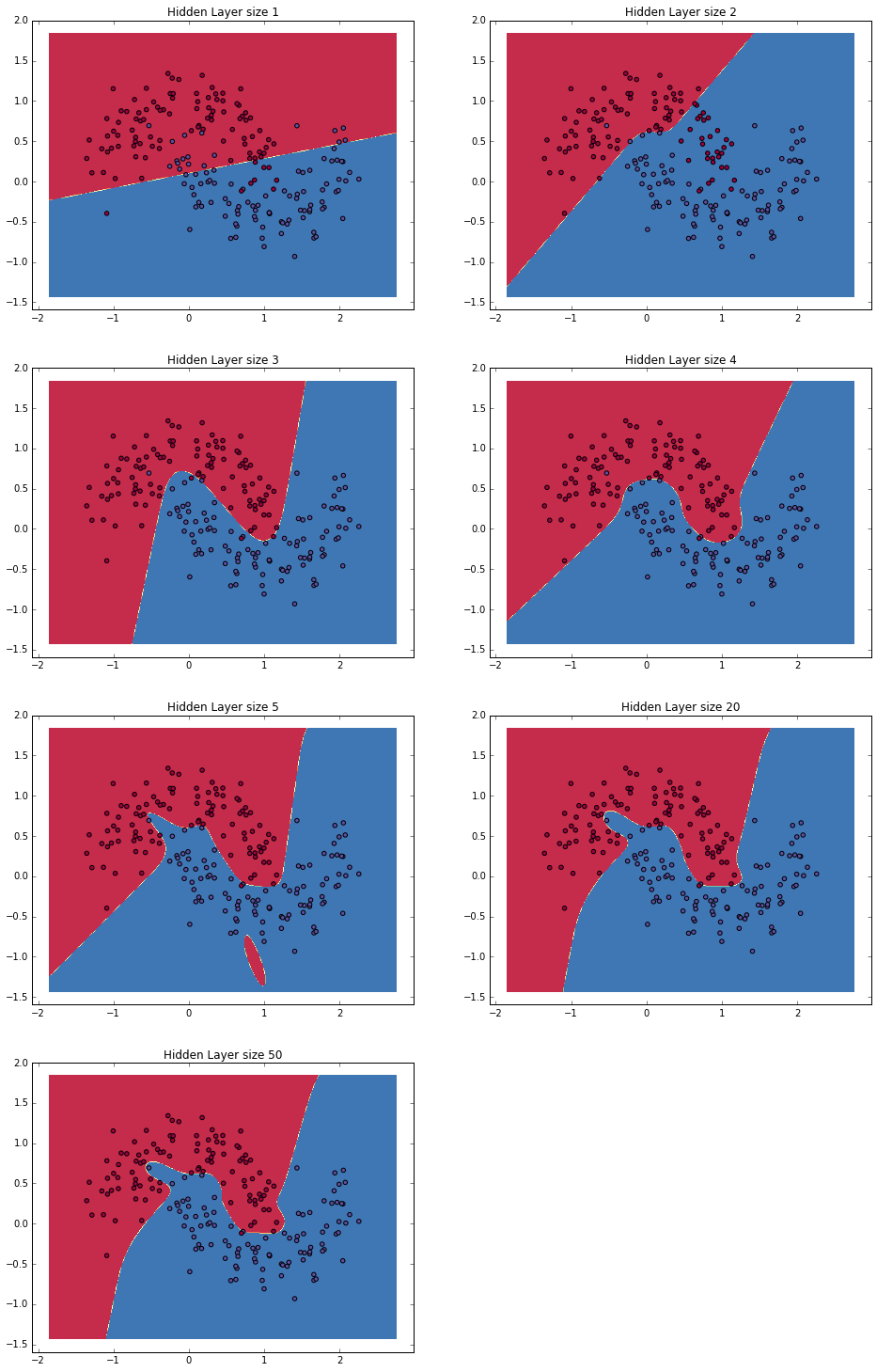
We can see that a hidden layer of low dimensionality nicely captures the general trend of our data. Higher dimensionalities are prone to overfitting. They are “memorizing” the data as opposed to fitting the general shape. If we were to evaluate our model on a separate test set (and you should!) the model with a smaller hidden layer size would likely perform better due to better generalization. We could counteract overfitting with stronger regularization, but picking the a correct size for hidden layer is a much more “economical” solution.
EXERCISES
Here are some things you can try to become more familiar with the code:
- Instead of batch gradient descent, use minibatch gradient descent (more info) to train the network. Minibatch gradient descent typically performs better in practice.
- We used a fixed learning rate
for gradient descent. Implement an annealing schedule for the gradient descent learning rate (more info).
- We used a
activation function for our hidden layer. Experiment with other activation functions (some are mentioned above). Note that changing the activation function also means changing the backpropagation derivative.
- Extend the network from two to three classes. You will need to generate an appropriate dataset for this.
- Extend the network to four layers. Experiment with the layer size. Adding another hidden layer means you will need to adjust both the forward propagation as well as the backpropagation code.
All of the code is available as an iPython notebook on Github. Please leave questions or feedback in the comments!
从0开始用python实现神经网络 IMPLEMENTING A NEURAL NETWORK FROM SCRATCH IN PYTHON – AN INTRODUCTION的更多相关文章
- 计算机视觉学习记录 - Implementing a Neural Network from Scratch - An Introduction
0 - 学习目标 我们将实现一个简单的3层神经网络,我们不会仔细推到所需要的数学公式,但我们会给出我们这样做的直观解释.注意,此次代码并不能达到非常好的效果,可以自己进一步调整或者完成课后练习来进行改 ...
- Implementing Recurrent Neural Network from Scratch
Reading CSV file... Parsed 79171 sentences. Found 65376 unique words tokens. Using vocabulary size 8 ...
- 循环神经网络(Recurrent Neural Network,RNN)
为什么使用序列模型(sequence model)?标准的全连接神经网络(fully connected neural network)处理序列会有两个问题:1)全连接神经网络输入层和输出层长度固定, ...
- 卷积神经网络(Convolutional Neural Network,CNN)
全连接神经网络(Fully connected neural network)处理图像最大的问题在于全连接层的参数太多.参数增多除了导致计算速度减慢,还很容易导致过拟合问题.所以需要一个更合理的神经网 ...
- 【转载】 卷积神经网络(Convolutional Neural Network,CNN)
作者:wuliytTaotao 出处:https://www.cnblogs.com/wuliytTaotao/ 本作品采用知识共享署名-非商业性使用-相同方式共享 4.0 国际许可协议进行许可,欢迎 ...
- 4.5 RNN循环神经网络(recurrent neural network)
自己开发了一个股票智能分析软件,功能很强大,需要的点击下面的链接获取: https://www.cnblogs.com/bclshuai/p/11380657.html 1.1 RNN循环神经网络 ...
- Recurrent Neural Network系列2--利用Python,Theano实现RNN
作者:zhbzz2007 出处:http://www.cnblogs.com/zhbzz2007 欢迎转载,也请保留这段声明.谢谢! 本文翻译自 RECURRENT NEURAL NETWORKS T ...
- Recurrent Neural Network系列4--利用Python,Theano实现GRU或LSTM
yi作者:zhbzz2007 出处:http://www.cnblogs.com/zhbzz2007 欢迎转载,也请保留这段声明.谢谢! 本文翻译自 RECURRENT NEURAL NETWORK ...
- AI - TensorFlow - 第一个神经网络(First Neural Network)
Hello world # coding=utf-8 import tensorflow as tf import os os.environ[' try: tf.contrib.eager.enab ...
随机推荐
- 用docker搭建测试环境--docker的基本操作
上一篇文章中最后执行了docker pull centos的指令,经过一段时间的等待,会从hub.docker.com上下载docker官方最新的centos的images,接下来熟悉一下docker ...
- hdu2255 奔小康赚大钱 km算法解决最优匹配(最大权完美匹配)
/** 题目:hdu2255 奔小康赚大钱 km算法 链接:http://acm.hdu.edu.cn/showproblem.php?pid=2255 题意:lv 思路:最优匹配(最大权完美匹配) ...
- centos7.4 install docker-ce
1.uninstall old version docker yum -y remove docker-common docker container-selinux docker-selinux d ...
- python read文件内容的iter方式
遍历file的方式 iter(lambda: f.read(4096), "")等价与while True: data = f.read(4096) if not data: br ...
- C0302 将一个代码块中的内容保存在文件中, 查看一个rpm包是否可以安装
#!/bin/bash # 这个脚本是用来描述和确认是否可以安装一个rpm包 # 在一个文件中保存输出 SUCCESS=0 E_NOARGS=65 if [ -z "$1" ] t ...
- 常用cms
最近,朋友要建站让我帮着推荐个好的CMS(内容管理系统),个人认为其实选择哪个CMS并不重要,除了对搜索引擎的亲好外,个人的使用操作习惯和对所选CMS系统的熟悉程度有很大关系. 这里为需要建站但又徘徊 ...
- 第二百三十节,jQuery EasyUI,后台管理界面---后台管理
jQuery EasyUI,后台管理界面---后台管理 一,admin.php,后台管理界面 <?php session_start(); if (!isset($_SESSION['admin ...
- 红黑树red-black tree
书籍:<算法导论>第13章 红黑树性质:1. 每个节点要么red要么black.2. 根节点是black节点.3. 叶子节点是black节点.4. red节点的左右儿子节点都是black节 ...
- XStream的基本使用
先准备两个bean public class Book { private int bookId; private String bookName; private String bookCode; ...
- pandas基础: Series和DataFrame的简单介绍
一.pandas 是什么 pandas 是基于 NumPy 的一个 Python 数据分析包,主要目的是为了数据分析.它提供了大量高级的数据结构和对数据处理的方法. pandas 有两个主要的数据结构 ...