opencv数据结构总结
OpenCV里面用到了很多图像相关的数据结构,熟练掌握它们是学习图像的基础。
1、IplImage
|
IplImage |
|
IplImage typedef struct _IplImage alphaChannel 在OpenCV中被忽略。 |
2、CvMat
|
CvMat |
|
CvMat typedef struct CvMat |
3、CvArr
|
CvArr |
|
CvArr typedef void CvArr; |
4、CvPoint2D32f
|
CvPoint2D32f |
|
CvPoint2D32f typedef struct CvPoint2D32f |
5、CvPoint
|
CvPoint |
|
CvPoint typedef struct CvPoint |
6、CvRect
|
CvRect |
|
CvRect typedef struct CvRect |
7、CvHistogram
|
CvHistogram |
|
CvHistogram typedef struct CvHistogram |
8、CvMemStorage
CvMemStorage
Growing memory storage
typedef struct CvMemStorage
{
struct CvMemBlock* bottom;/* first allocated block */
struct CvMemBlock* top; /* the current memory block - top of the stack */
struct CvMemStorage* parent; /* borrows new blocks from */
int block_size; /* block size */
int free_space; /* free space in the top block (in bytes) */
} CvMemStorage;
内存存储器是一个可用来存储诸如序列,轮廓,图形,子划分等动态增长数据结构的底层结构。它是由一系列以同等大小的内存块构成,呈列表型 ---bottom 域指的是列首,top 域指的是当前指向的块但未必是列尾.在bottom和top之间所有的块(包括bottom, 不包括top)被完全占据了空间;在 top和列尾之间所有的块(包括块尾,不包括top)则是空的;而top块本身则被占据了部分空间 -- free_space 指的是top块剩馀的空字节数。
新分配的内存缓冲区(或显式的通过 cvMemStorageAlloc 函数分配,或隐式的通过 cvSeqPush, cvGraphAddEdge等高级函数分配)总是起始于当前块(即top块)的剩馀那部分,如果剩馀那部分能满足要求(够分配的大小)。分配后,free_space 就减少了新分配的那部分内存大小,外加一些用来保存适当列型的附加大小。当top块的剩馀空间无法满足被分配的块(缓冲区)大小时,top块的下一个存储块被置为当前块(新的top块) -- free_space 被置为先前分配的整个块的大小。
如果已经不存在空的存储块(即:top块已是列尾),则必须再分配一个新的块(或从parent那继承,见 cvCreateChildMemStorage)并将该块加到列尾上去。于是,存储器(memory storage)就如同栈(Stack)那样, bottom指向栈底,(top, free_space)对指向栈顶。栈顶可通过 cvSaveMemStoragePos保存,通过 cvRestoreMemStoragePos 恢复指向, 通过 cvClearStorage 重置。
9、CvSeq
CvSeq
可动态增长元素序列(OpenCV_1.0已发生改变,详见cxtypes.h) Growable sequence of elements
#define CV_SEQUENCE_FIELDS() \
int flags; /* micsellaneous flags */ \
int header_size; /* size of sequence header */ \
struct CvSeq* h_prev; /* previous sequence */ \
struct CvSeq* h_next; /* next sequence */ \
struct CvSeq* v_prev; /* 2nd previous sequence */ \
struct CvSeq* v_next; /* 2nd next sequence */ \
int total; /* total number of elements */ \
int elem_size;/* size of sequence element in bytes */ \
char* block_max;/* maximal bound of the last block */ \
char* ptr; /* current write pointer */ \
int delta_elems; /* how many elements allocated when the sequence grows (sequence granularity) */ \
CvMemStorage* storage; /* where the seq is stored */ \
CvSeqBlock* free_blocks; /* free blocks list */ \
CvSeqBlock* first; /* pointer to the first sequence block */
typedef struct CvSeq
{
CV_SEQUENCE_FIELDS()
} CvSeq;
结构CvSeq是所有OpenCV动态数据结构的基础。在1.0版本中,将前六个成员剥离出来定义成一个宏. 通过不同寻常的宏定义简化了带有附加参数的结构 CvSeq 的扩展。为了扩展 CvSeq, 用户可以定义一新的数据结构或在通过宏CV_SEQUENCE_FIELDS()所包括的 CvSeq 的域后在放入用户自定义的域。
有两种类型的序列 -- 稠密序列和稀疏序列。稠密序列都派生自 CvSeq, 它们用来代表可扩展的一维数组 -- 向量,栈,队列,双端队列。数据间不存在空隙(即:连续存放)-- 如果元素从序列中间被删除或插入新的元素到序列中(不是两端),那么此元素后边的相关元素会被移动。稀疏序列都派生自 CvSet,后面会有详细的讨论。它们都是由节点所组成的序列,每一个节点要么被占用空间要么是空,由 flag 标志指定。这些序列作为无序的数据结构而被使用,如点集,图,哈希表等。
域 header_size(结构的大小) 含有序列头部节点的实际大小,此大小大于或等于 sizeof(CvSeq).当这个宏用在序列中时,应该等于 sizeof(CvSeq),若这个宏用在其他结构中,如CvContour,结构的大小应该大于sizeof(CvSeq); 域 h_prev, h_next, v_prev, v_next 可用来创建不同序列的层次结构。域 h_prev, h_next 指向同一层次结构前一个和后一个序列,而域 v_prev, v_next指向在垂直方向上的前一个和后一个序列,即:父亲和子孙。
域 first 指向第一个序列快,块结构在后面描述。
域 total 包含稠密序列的总元素数和稀疏序列被分配的节点数。
域 flags 的高16位描述(包含)特定的动态结构类型(CV_SEQ_MAGIC_VAL 表示稠密序列,CV_SET_MAGIC_VAL 表示稀疏序列),同时包含形形色色的信息。
低 CV_SEQ_ELTYPE_BITS 位包含元素类型的 ID(标示符)。大多数处理函数并不会用到元素类型,而会用到存放在 elem_size 中的元素大小 。如果序列中包含 CvMat 中的数据,那么元素的类型就与 CvMat 中的类型相匹配, 如:CV_32SC2 可以被使用为由二维空间中的点序列, CV_32FC1用为由浮点数组成的序列等。通过宏 CV_SEQ_ELTYPE(seq_header_ptr) 来获取序列中元素的类型。处理数字序列的函数判断: elem.size 等同于序列元素的大小。除了与 CvMat 相兼容的类型外,还有几个在头 cvtypes.h 中定义的额外的类型。
10、CvBox2D
CvBox2D
旋转的二维盒子
typedef struct CvBox2D
{
CvPoint2D32f center; /* 盒子的中心 */
CvSize2D32f size; /* 盒子的长和宽 */
float angle; /* 水平轴与第一个边的夹角,用弧度表示*/
}
CvBox2D;
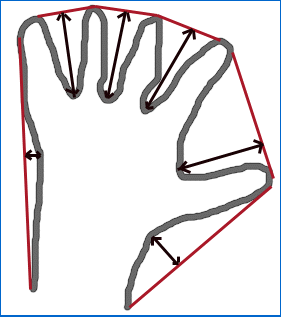
11、CvConvexityDefect
用来描述一个简单轮廓凸性缺陷的结构体
typedef struct CvConvexityDefect
{
CvPoint* start; /* 缺陷开始的轮廓点 */
CvPoint* end; /* 缺陷结束的轮廓点 */
CvPoint* depth_point; /* 缺陷中距离凸形最远的轮廓点(谷底) */
float depth; /* 谷底距离凸形的深度*/
} CvConvexityDefect;
Picture. 手部轮廓的凸形缺陷.
opencv数据结构总结的更多相关文章
- opencv数据结构与基本绘图
#include <opencv2\core\core.hpp>//核心组件 #include <opencv2\opencv.hpp>//GUI,包含媒体输入输出,视频捕捉. ...
- opencv 2 Opencv数据结构与基本绘图
基础图像容器Mat Mat 是一个类,又两个数据部分组成:矩阵头(包含矩阵尺寸,存储方法,存储地址等信息)和一个指向存储所有像素值的矩阵(根据所选存储方法不同,矩阵可以是不同的维数)的指针.矩阵头的尺 ...
- opencv数据结构-MAT结构详解
1.定义 OpenCV中的C结构体有 CvMat 和 CvMatND,但后续的应用中指出 CvMat 和 CvMatND 弃用了,在C++封装中用 Mat 代替,另外旧版还有一个 IplImage,同 ...
- OpenCV学习笔记(四十)——再谈OpenCV数据结构Mat详解
原文:http://blog.csdn.net/yang_xian521/article/details/7107786 我记得开始接触OpenCV就是因为一个算法里面需要2维动态数组,那时候看cor ...
- OpenCV数据结构:CvMat,IplImage,CvArr的应用
最近看HS算法时,发现在新的OpenCV3.0已经移除了该算法,于是不得不看老版的.这其中涉及到了CvMat,CvArr,IplImage的使用.关于这三个结构与Mat的转换关系,总结如下: (1)派 ...
- opencv 61篇
(一)--安装配置.第一个程序 标签: imagebuildincludeinputpathcmd 2011-10-21 16:16 41132人阅读 评论(50) 收藏 举报 分类: OpenCV ...
- OpenCV学习笔记:MAT解析
在2001年刚刚出现的时候,OpenCV基于 C 语言接口而建.为了在内存(memory)中存放图像,当时采用名为 IplImage 的C语言结构体,时至今日这仍出现在大多数的旧版教程和教学材料.但这 ...
- OpenCV中Mat的详解
每次碰到Mat都得反复查具体的用法,网上的基础讲解不多,难得看到一篇,赶快转来收藏~ 原文地址:http://www.opencvchina.com/thread-1039-1-1.html 目标 我 ...
- opencv学习笔记——FileStorage类的数据存取操作
OpenCV的许多应用都需要使用数据的存储于读取,例如经过3D校准后的相机,需要存储校准结果矩阵,以方便下次调用该数据:基于机器学习的应用,同样需要将学习得到的参数保存等.OpenCV通过XML/YA ...
随机推荐
- 【内部竞聘】华东/华南 -区域招商高级经理/经理 - 荐才纳贤 - 京东内部论坛 - Powered by Discuz!
[内部竞聘]华东/华南 -区域招商高级经理/经理 - 荐才纳贤 - 京东内部论坛 - Powered by Discuz! [内部竞聘]华东/华南 -区域招商高级经理/经理 [复制链接] ...
- request.setAttribute()用法
小问题: JSP1代码 String [] test=new String[2]; test[0]="1"; test[1]="2"; request.setA ...
- FIREDAC TFDCONNECTION连接MYSQL数据库
FIREDAC TFDCONNECTION连接MYSQL数据库 procedure TfrmDB.ConnectDB;begin FDMoniFlatFileClientLink1.FileName ...
- javascript之文档碎片,文档碎片在理论上可以提高DOM操作的执行效率
刚来到这里,趁着还没有忘记,来记录一下,昨晚学习的一个知识点——JavaScript中的文档碎片. 一.对文档碎片的基本认识 文档碎片可以提高DOM操作性能(理论上,注意!!理论上的) 文档碎片原理 ...
- 兼容性记录-class属性
getAttribute获得class属性时,IE6,IE7的传參是className,IE7+和现代游览器都是class 全部游览器DOMElement均有的className属性,其在IE各版本号 ...
- [Reactive Programming] Async requests and responses in RxJS
We will learn how to perform network requests to a backend using RxJS Observables. A example of basi ...
- JSP-注释,脚本元素,指令
jsp中的注释 jsp隐藏注释 完全对客户机隐藏,不会将注释内容发送给客户机. 其语法格式为:<%-- comment --%> comment为要添加的文本注释内容. HTML注释 不完 ...
- ubuntu下git clone 出现Permission denied (publickey).
今天在ubuntu上使用git 克隆 github上面的库,一直权限拒绝Permission denied (publickey). 公钥绑了好几次,都不行: 最后怀疑是git配置公钥地址有问题:打开 ...
- div宽度设置无效问题解决
问题描述: 要设置两个div在同一行显示,都加入了display:inline样式,但是其中一个div的宽度设置无效,在浏览器显示它的宽度始终是1003px. 解决办法: 方法1/给div加入样式:f ...
- (转)[开发笔记]-js判断用户的浏览设备是移动设备还是PC
<script type="text/javascript"> function browserRedirect() { var sUserAgent = naviga ...