图像特征与描述子(直方图, 聚类, 边缘检测, 兴趣点/关键点, Harris角点, 斑点(Blob), SIFI, 纹理特征)
1.直方图
用于计算图片特征,表达, 使得数据具有总结性, 颜色直方图对数据空间进行量化,好比10个bin
2. 聚类
类内对象的相关性高
类间对象的相关性差
常用算法:kmeans, EM算法, meanshift, 谱聚类(密度聚类), 层次聚类
kmeans聚类
选取k个类中心,随机选取
计算每个点跟k个类中心的位置
把数据点分配给距离最近的一个类中心
计算新的类中心-对该类中的所有点取均值
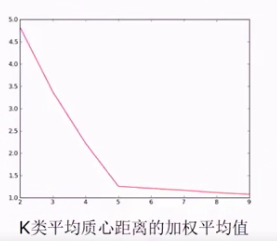
类中心数K的选取
K类平均质心的距离加权平均值, 当k=5时的斜率发生变化,我们可以选取5作为分类的个数
kmeans ++ 半随机(初始点的选取)
第一类中心 - 随机选取
记D(x) 为数据点x距离最近的聚类中心的距离
选取下一个聚类中心, 选取的概率正比于D(x) ^ 2
以此类推,到第k个
量化颜色直方图
聚类颜色直方图: 使用聚类算法对像素点颜色向量进行聚类, 单元由聚类中心代表
3. 边缘检测
像素明显变化的区域, 具有丰富的语义信息
用途: 物体识别,几何视角变化
定义: 像素函数快速变化的区域, 一阶导数的极值区域,二阶导数的0点位置
步骤:
先高斯去噪,再使用一阶导数获取极值
公式: 对x方向进行求导 б 表示的是标准差 对y方向进行求导

梯度幅值/强度
hx(x,y)^ 2 + hy(x, y) ^ 2
梯度(增加最快)方向
arctan(hy(x, y)/ hx(x, y))
4. 兴趣点/关键点
稳定局部
特点: 可重复性,显著性
抗图片变化
外貌变化(亮度,光照)
几何变化(平移, 选择,尺度)
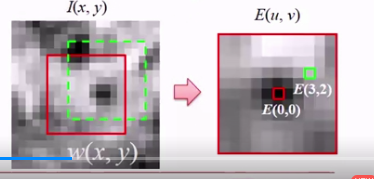
5.Harris角点
一种显著点:在任何方向上移动小观察窗,导致大的像素变动
E(u, v) = ΣW(x, y)[I(x+u, y+v)-I(x, y)] ^2
W(x, y)是高斯函数进行加权的, x,y表示当前位置, u和v表示移动了的位置
6.斑点(Blob)
拉普拉斯梯度:一阶导数极值点 - 二阶导数零点
梯度/边缘可以通过查找:二阶导数接近零, 一阶导数足够大
对噪声很敏感, 需要先做高斯平滑
公式: Δf = δ2f / δ2x + δ2f / δ2y 对x求二阶导, 对y方向求二阶导
斑点是找拉普拉斯的极值
边缘是找拉普拉斯的零值
7.SIFT
SIFT特征计算
计算高斯差分(DoG)尺度空间,获取极值点
特征点处理: 位置插值, 去除低对比度点, 去除边缘点
方向估计: 2*2网格, 8个方向,获得最高值为关键点的主方向,特征点方向归一化,即所有方向为同一方向
描述子提取: 在旋转坐标上采样16*16的像素窗, 4*4网格,8方向直方图,总共178维
8.纹理特征
HOG(方向梯度直方图)
梯度幅值,方向 s = sqrt(sx^2 + sy^2)
Block 拆分
16*16的block 步长是8, 包含2*2个cell, 每个cell8*8, 9个方向
积累梯度幅值,使用位置高斯加权,使用相邻bin线性插值
64&128的维度图:7*15 * (2*2) * 9 = 3780
LBP(局部二值模式)
将每个像素点与周围点大小半径比较,半径R的圆上,均匀采样P个点,根据赫值大小,量化为0或1
图像特征与描述子(直方图, 聚类, 边缘检测, 兴趣点/关键点, Harris角点, 斑点(Blob), SIFI, 纹理特征)的更多相关文章
- BRIEF特征点描述子
简介 BRIEF是2010年的一篇名为<BRIEF:Binary Robust Independent Elementary Features>的文章中提出,BRIEF是对已检测到的特征点 ...
- 第三讲_图像特征与描述Image Feature Descriptor
第三讲_图像特征与描述Image Feature Descriptor 概要 特征提取方法 直方图 对图片数据/特征分布的一种统计:对不同量进行直方图统计:可以表示灰度,颜色,梯度,边缘,形状,纹理, ...
- Brief描述子
一.Brief算法 1.基本原理 BRIEF是2010年的一篇名为<BRIEF:Binary Robust Independent Elementary Features>的文章中提出,B ...
- [OpenCV-Python] OpenCV 中图像特征提取与描述 部分 V (一)
部分 V图像特征提取与描述 OpenCV-Python 中文教程(搬运)目录 29 理解图像特征 目标本节我会试着帮你理解什么是图像特征,为什么图像特征很重要,为什么角点很重要等.29.1 解释 我相 ...
- (一)ORB描述子提取
ORBSLAM2中使用ORB描述子的方法 经典的视觉SLAM系统大体分为两种:其一是基于特征点法的,其二是基于直接法的.那么本文主要就讲特征点法的SLAM. 基于特征点法的视觉SLAM系统典型的有PT ...
- LBP纹理特征[转自]
LBP方法(Local binary patterns)是一个计算机视觉中用于图像特征分类的一个方法.LBP方法在1994年首先由T. Ojala, M.Pietikäinen, 和 D. Harwo ...
- 图像的特征工程:HOG特征描述子的介绍
介绍 在机器学习算法的世界里,特征工程是非常重要的.实际上,作为一名数据科学家,这是我最喜欢的方面之一!从现有特征中设计新特征并改进模型的性能,这就是我们进行最多实验的地方. 世界上一些顶级数据科学家 ...
- SIFT算法:特征描述子
SIFT算法:DoG尺度空间生产 SIFT算法:KeyPoint找寻.定位与优化 SIFT算法:确定特征点方向 SIFT算法:特征描述子 目录: 1.确定描述子采样区域 2.生成描述子 2.1 旋 ...
- SIFT解析(三)生成特征描述子
以上两篇文章中检测在DOG空间中稳定的特征点,lowe已经提到这些特征点是比Harris角点等特征还要稳定的特征.下一步骤我们要考虑的就是如何去很好地描述这些DOG特征点. 下面好好说说如何来描述这些 ...
随机推荐
- Java网络编程和NIO详解1:JAVA 中原生的 socket 通信机制
Java网络编程和NIO详解1:JAVA 中原生的 socket 通信机制 JAVA 中原生的 socket 通信机制 摘要:本文属于原创,欢迎转载,转载请保留出处:https://github.co ...
- 2-3-2 rsync+inotify备份同步数据
RSYNC = Remote Sync 远程同步 高效,一定要结合shell 官网:https://rsync.samba.org Author: Andrew Tridgell, Wayne Dav ...
- poj3016
题解 求n编的poj3666 然后dp 代码: #include<cstdio> #include<cstring> #include<algorithm> usi ...
- 在JavaScript中进行文件处理,第五部分:Blobs
译注:原文是<JavaScript高级程序设计>的作者Nicholas Zakas写的,本翻译纯属为自己学习而做,仅供参考.原文链接:这里 到目前为止,这个系列的帖子集中在和这些文件交互- ...
- Custom Ribbon in SharePoint 2010 & which not wrok when migrate from 2010 to 2013
博客地址 http://blog.csdn.net/foxdave 1. First of all, let me show you the ribbon modal in our project w ...
- C++ 标准库和标准模板库(STL)
转自原文http://blog.csdn.net/sxhelijian/article/details/7552499 一.C++标准库 C++标准库的内容分为10类,分别是(建议在阅读中,将你已经用 ...
- Linux:shell脚本字符显示特殊颜色效果
shell脚本字符显示颜色和特殊效果 (一) 颜色显示 1)字符颜色显示 #!/bin/bash #字符颜色显示 #-e:允许echo使用转义 #\[:开始位 #\[0m:结束位 #\033等同于\e ...
- 在sublime中使用cppcheck
要想在sublime中使用cppcheck很简单,只需要安装两个插件就可以了:Sublimelinter 和 Sublimelinter-cppcheck 安装完成后在Sublimelinter的配置 ...
- scikit-learn 学习笔记-- Generalized Linear Models (一)
scikit-learn 是非常优秀的一个有关机器学习的 Python Lib,包含了除深度学习之外的传统机器学习的绝大多数算法,对于了解传统机器学习是一个很不错的平台.每个算法都有相应的例子,既可以 ...
- 一台 linux 主机装两个mysql
启动 3306 nohup /usr/local/mysql5.1.7/bin/mysqld_safe & 启动 3307/usr/local/mysql/bin/mysqld --defau ...