costmap_2d 解析
costmap_2d这个包提供了一种2D代价地图的实现方案,该方案利用输入的传感器数据,构建数据2D或者3D代价地图(取决于是否使用基于voxel的实现),并根据占用网格和用户定义的膨胀半径计算2D代价地图的代价。 此外,该包也支持利用map_server初始化代价地图,支持滚动窗口的代价地图,支持参数化订阅和传感器主题的配置。
1、概述

注:红色代表代价地图中的障碍物,蓝色代表的是通过机器人内切圆半径计算的障碍物膨胀,红色的多边形代表机器人外壳。为了使机器人不碰到障碍物,机器人的外壳绝对不允许与红色单元相交,机器人的中心绝对不允许与蓝色单元相交。
costmap_2d包提供了一个可配置的结构,以网格占有的形式保存机器人在该处网格的导航信息。该包使用静态地图的传感器数据与信息,通过 costmap_2d::Costmap2DROS 来储存和升级世界中的障碍物信息。The costmap_2d::Costmap2DROS对象为用户提供了一个纯粹的二维界面,这意味着对障碍物的查询只能在列中进行,例如,在XY平面上位于同一位置的桌子和鞋,虽然在Z方向上有差异但是它们在costmap_2d::Costmap2DROS对象代价地图中对应的cell上拥有相同的代价值。
这种设计对平面空间进行路径规划是有帮助的。
从Hydro发布版本开始, 用来写数据到代价地图的底层方法已经完全可配置了。
每种功能放置一层中。 例如,静态地图是一层,障碍物是另一层。 缺省情况下,障碍物层维护的是3D信息,3D障碍物数据可以让层更加灵活的标记和清除障碍物。该包提供的ROS化功能接口主要就是costmap_2d::Costmap2DROS,它使用costmap_2d::LayeredCostmap
来跟踪每一层。 每一层在Costmap2DROS中以插件方式被实例化,并被添加到LayeredCostmap。
每一层可以独立编译,且可使用C++接口实现对代价地图的随意修改。costmap_2d::Costmap2D
类中实现了用来存储和访问2D代价地图的的基本数据结构。关于代价地图如何更新占用珊格的细节将在下面介绍,同时提供了页面链接供查看某一层具体如何工作。
2、障碍物清楚与占有(clearing and mark)
代价地图自动订阅传感器发布的主题并基于数据进行相应自我更新。
对每个传感器来说,其可以用来执行mark(将障碍物信息插入到代价地图),也可以用来执行clear(从代价地图移除障碍物)或者二者都执行。marking操作就是索引到数组内修改cell的代价。然而对于clearing操作,每次观测报告都需要传感器源向被观测对象发射线。
如果存储的障碍物信息是3D的,需要将每一列的障碍物信息投影成2D后才能放入到代价地图。
3、空间状态(占有、自由、未知)
虽然代价地图中每个cell可用255个不同值中任何一个值(see the inflation section),可是下层数据结构仅需要3个值。
具体来说在这种下层结构中,每个cell仅需要3个值来表示cell的3种状态:free,occupied,unknown。 当投影到代价地图时候,每种状态被赋一个特定的代价值。 如果列有一定量的占用(see mark_threshold parameter)
就被赋代价值costmap_2d::LETHAL_OBSTACLE, 如果列有一定量的unknown cells (see unknown_threshold parameter)
就被赋代价值costmap_2d::NO_INFORMATION, 剩余其它列赋代价值为costmap_2d::FREE_SPACE。
4、地图更新
代价地图以参数update_frequency 指定的周期进行地图更新。每个周期传感器数据进来后,都要在代价地图底层占用结构上执行标记和清除障碍操作,并且这种结构会被投影到代价地图附上相应代价值。
这完成之后,对代价赋值为costmap_2d::LETHAL_OBSTACLE的每个cell执行障碍物的膨胀操作,即从每个占用cell向外传播代价值,直到用户定义的膨胀半径为止。细节如下6.
5、tf
为了把来自传感器源的数据插入到代价地图,costmap_2d::Costmap2DROS要大量使用tf。所有tf转换由global_frame parameter,the robot_base_frame parameter,以及sensor
sources建立联系和更新。The transform_tolerance parameter定义了tf转换所能容忍的的最大延时。如果
tf 树没有以期望速度被更新,那么导航功能包集将会让机器人停止。
6、膨胀(Inflation)
Inflation is the process of propagating cost values out from occupied
cells that decrease with distance. For this purpose, we define 5
specific symbols for costmap values as they relate to a robot.
膨胀是由被占有的栅格(occupied cells )向外传播其代价值的过程,传播的值随距离增加而递减。为了实现该目的,定义了五个与机器人相关联的特殊符号。
具体状态和值对应有下图:
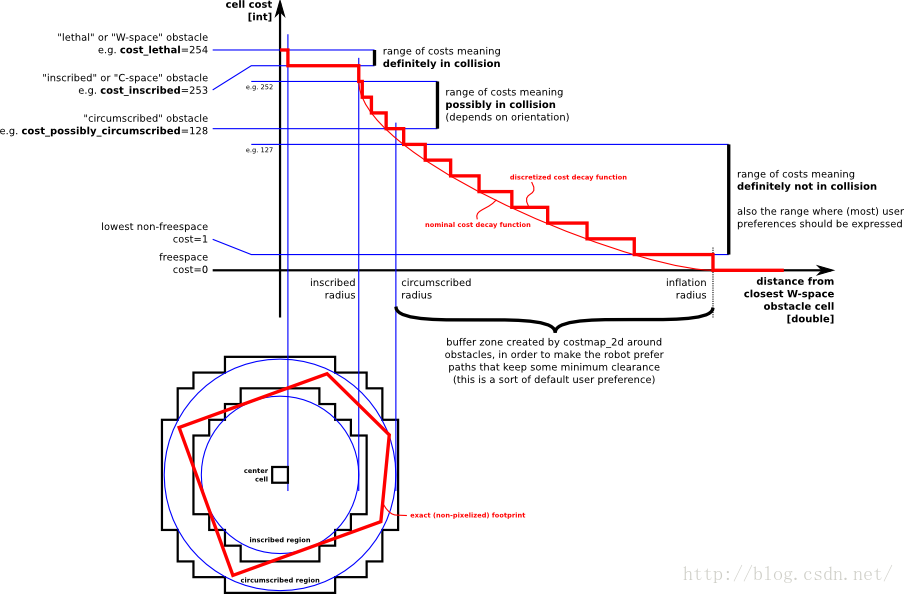
"Lethal" cost:意思是cell内有障碍物,因此如果机器人中心位于那个cell,很显然机器人会碰到障碍
"Inscribed" cost:意思是cell到障碍物的距离小于机器人内切圆半径。 因此如果机器人中心在cell(或者代价>=内切代价),机器人与障碍物肯定有冲突
"Possibly circumscribed"
cost:类似于内切,但是使用机器人外接圆作为截止距离。因此,如果机器人中心位于cell上(或者代价>=外接代价),那么它与障碍物是否冲突依赖于机器人方位。使用术语“可能”意思是这不一定是一个真正障碍cell,但是有些用户喜欢放特定的代价值进去为特定目的。
例如,如果用户要表示机器人应该尝试避开建筑物某特定区域,
它们可以在代价地图上为那个与任何障碍毫无关系的区域(该区域本来就不是障碍区)插入代价值。注意,虽然上图示例中使用了代价值128,但是实际由于代价值受内切圆半径和外接圆半径的影响,真正实际值并不一定是128。
"Freespace" cost: 假定为0,意思是没啥东西会阻碍机器人到那里
"Unknown" cost:意思是cell上没有信息
All other costs: 被赋值为"Freespace"和"Possibly circumscribed"之间的一个值,取决于到 "Lethal" cell的距离以及用户定义的衰减函数
链接:http://wiki.ros.org/costmap_2d#Inflation
costmap_2d 解析的更多相关文章
- Navigation源码(一) move_base最全解析
一.概述 目测是全网最全的解析,花了几个小时通读并整理的,供大家参考学习. 概况的话可以看下古月居 https://www.guyuehome.com/270,其实它是翻译官方的,英语ok的可以去ro ...
- 【原】Android热更新开源项目Tinker源码解析系列之三:so热更新
本系列将从以下三个方面对Tinker进行源码解析: Android热更新开源项目Tinker源码解析系列之一:Dex热更新 Android热更新开源项目Tinker源码解析系列之二:资源文件热更新 A ...
- .NET Core中的认证管理解析
.NET Core中的认证管理解析 0x00 问题来源 在新建.NET Core的Web项目时选择“使用个人用户账户”就可以创建一个带有用户和权限管理的项目,已经准备好了用户注册.登录等很多页面,也可 ...
- Html Agility Pack 解析Html
Hello 好久不见 哈哈,今天给大家分享一个解析Html的类库 Html Agility Pack.这个适用于想获取某网页里面的部分内容.今天就拿我的Csdn的博客列表来举例. 打开页面 用Fir ...
- 【原】Android热更新开源项目Tinker源码解析系列之一:Dex热更新
[原]Android热更新开源项目Tinker源码解析系列之一:Dex热更新 Tinker是微信的第一个开源项目,主要用于安卓应用bug的热修复和功能的迭代. Tinker github地址:http ...
- 【原】Android热更新开源项目Tinker源码解析系列之二:资源文件热更新
上一篇文章介绍了Dex文件的热更新流程,本文将会分析Tinker中对资源文件的热更新流程. 同Dex,资源文件的热更新同样包括三个部分:资源补丁生成,资源补丁合成及资源补丁加载. 本系列将从以下三个方 ...
- 多线程爬坑之路-Thread和Runable源码解析之基本方法的运用实例
前面的文章:多线程爬坑之路-学习多线程需要来了解哪些东西?(concurrent并发包的数据结构和线程池,Locks锁,Atomic原子类) 多线程爬坑之路-Thread和Runable源码解析 前面 ...
- Asp.Net WebApi核心对象解析(下篇)
在接着写Asp.Net WebApi核心对象解析(下篇)之前,还是一如既往的扯扯淡,元旦刚过,整个人还是处于晕的状态,一大早就来处理系统BUG,简直是坑爹(好在没让我元旦赶过来该BUG),队友挖的坑, ...
- 【知识必备】内存泄漏全解析,从此拒绝ANR,让OOM远离你的身边,跟内存泄漏say byebye
一.写在前面 对于C++来说,内存泄漏就是new出来的对象没有delete,俗称野指针:而对于java来说,就是new出来的Object放在Heap上无法被GC回收:而这里就把我之前的一篇内存泄漏的总 ...
随机推荐
- sql server开发工具
查询分析器的使用 SQL语言包含四个部分: 1.数据定义语言(DDL) : 例如 create, drop, alter等语句 2.数据操作语言(DML) : 例如 insert,delete, up ...
- 运维监控-Open-Falcon介绍
运维监控-Open-Falcon介绍 作者:尹正杰 版权声明:原创作品,谢绝转载!否则将追究法律责任. 一.Open-Falcon 介绍 监控系统是整个运维环节,乃至整个产品生命周期中最重要的一环,事 ...
- 设计模式---接口隔离模式之中介者模式(Mediator)
一:概念 在Mediator模式中,类之间的交互行为被统一放在Mediator的对象中,对象通过Mediator对象同其他对象交互.Mediator对象起到控制器的作用 二:动机 在软件构建的过程中, ...
- Dubbo管控台安装(zookeeper集群)
Dubbo管控台可以对注册到zookeeper注册中心的服务或服务消费者进行管理,但管控台是否正常对Dubbo服务没有影响,管控台也不需要高可用,因此节点部署 环境:Centos6.6.IP:10 ...
- Git(使用码云)
使用GitHub时,国内的用户经常遇到的问题是访问速度太慢,有时候还会出现无法连接的情况(原因你懂的). 如果我们希望体验Git飞一般的速度,可以使用国内的Git托管服务——码云(gitee.com) ...
- MySQL的随笔
数据库引擎 MySQL5.0支持的存储引擎包括MyISAM,InnoDB.MEMORY.MERGE.BDB等等,其中InnoDB和BDB提供事务安全表,其他存储引擎都是非事务安全表. MyISAM M ...
- CRLF Injection漏洞的利用与实例分析
CRLF Injection很少遇见,这次被我逮住了.我看zone中(http://zone.wooyun.org/content/13323)还有一些同学对于这个漏洞不甚了解,甚至分不清它与CSRF ...
- Play XML Entities
链接:https://pentesterlab.com/exercises/play_xxe/course Introduction This course details the exploitat ...
- 【LeetCode】89.Gary Code
Problem: The gray code is a binary numeral system where two successive values differ in only one bit ...
- mvc EF框架中,加载外键对象序列化对象时报错 序列化类型为XX的对象时检测到循环引用
Newtonsoft.Json.dll 或者通过->工具->库程序包管理工具->NuGet管理包->联机 输入Newtonsoft或者json.net Newtonsoft.J ...