Linux进程管理 (2)CFS调度器
关键词:
目录:
根据进程的特性可以将进程划分为:交互式进程、批处理进程、实时进程。
O(N)调度器从就绪队列中比较所有进程的优先级,然后选择一个最高优先级的进程作为下一个调度进程。每个进程都一个固定时间片,当进程时间片用完之后,调度器会选择下一个调度进程,当所有进程都运行一遍后再重新分配时间片。调度器选择下一个调度进程前需要遍历整个就绪队列,花费O(N)时间。
O(1)调度器优化了选择下一个进程的时间,它为每个CPU维护一组进程优先级队列,每个优先级一个队列,这样在选择下一个进程时,只需查询优先级队列相应的位图即可知道哪个队列中有酒须进程,查询时间为常数O(1)。
Linux定义了5种调度器类,分别对应stop、deadline、realtime、cfs、idle,他们通过next串联起来。
const struct sched_class stop_sched_class = {
.next = &dl_sched_class,
...
};
const struct sched_class dl_sched_class = {
.next = &rt_sched_class,
...
};
const struct sched_class rt_sched_class = {
.next = &fair_sched_class,
...
};
const struct sched_class fair_sched_class = {
.next = &idle_sched_class,
...
}
const struct sched_class idle_sched_class = {
/* .next is NULL */
...
};
/*
* Scheduling policies
*/
#define SCHED_NORMAL 0
#define SCHED_FIFO 1
#define SCHED_RR 2
#define SCHED_BATCH 3
/* SCHED_ISO: reserved but not implemented yet */
#define SCHED_IDLE 5
#define SCHED_DEADLINE 6
同时定义了6中调度策略,3中调度实体,他们之间的关系如下表。
| 调度器类 | 调度策略 | 调度实体 | 优先级 |
| stop_sched_class | |||
| dl_sched_class | SCHED_DEADLINE | sched_dl_entity | (, 0) |
| rt_sched_class |
SCHED_FIFO SCHED_RR |
sched_rt_entity | [0, 100) |
| fair_sched_class |
SCHED_NORMAL SCHED_BATCH |
sched_entity | [100, ) |
| idle_sched_class | SCHED_IDLE |
实时调度类相关参考《实时调度类分析,以及FIFO和RR对比实验》。
1. 权重计算
1.1 计算优先级
计算优先级之前,首先要明白struct task_struct中各个关于优先级成员的含义。
struct task_struct {
...
int prio, static_prio, normal_prio;
unsigned int rt_priority;
...
unsigned int policy;
...
};
prio:保存进程动态优先级,系统根据prio选择调度类,有些情况需要暂时提高进程优先级。
static_prio:静态优先级,在进程启动时分配。内核不保存nice值,通过PRIO_TO_NICE根据task_struct->static_prio计算得到。这个值可以通过nice/renice或者setpriority()修改。
normal_prio:是基于static_prio和调度策略计算出来的优先级,在创建进程时会继承父进程normal_prio。对普通进程来说,normal_prio等于static_prio;对实时进程,会根据rt_priority重新计算normal_prio。
rt_priority:实时进程的优先级,和进程设置参数sched_param.sched_priority等价。
nice/renice系统调用可以改变static_prio值。
rt_priority在普通进程中等于0,实时进程中范围是1~99。
normal_prio在普通进程中等于static_prio;在实时进程中normal_prio=99-rt_priority。
获取normal_prio的函数是normal_prio()
static inline int __normal_prio(struct task_struct *p)
{
return p->static_prio;
} static inline int normal_prio(struct task_struct *p)
{
int prio; if (task_has_dl_policy(p))
prio = MAX_DL_PRIO-;-----------------------------------对于DEADLINE类进程来说固定值为-1。
else if (task_has_rt_policy(p))
prio = MAX_RT_PRIO- - p->rt_priority;------------------对于实时进程来说,normal_prio=100-1-rt_priority
else
prio = __normal_prio(p);--------------------------------对普通进程来说normal_prio=static_prio
return prio;
}
prio在普通进程中和static_prio相等;在实时进程中prio和rt_priority存在prio+rt_priority=99关系。
获取prio的函数是effective_prio()。
static int effective_prio(struct task_struct *p)
{
p->normal_prio =normal_prio(p);
/*
* If we are RT tasks or we were boosted to RT priority,
* keep the priority unchanged. Otherwise, update priority
* to the normal priority:
*/
if (!rt_prio(p->prio))-------------------即prio大于99的情况,此时为普通进程,prio=normal_prio=static_prio。
return p->normal_prio;
return p->prio;
}
普通进程:static_prio=prio=normal_prio;rt_priority=0。
实时进程:prio=normal_prio=99-rt_priority;rt_priority=sched_param.sched_priority,rt_priority=[1, 99];static_prio保持默认值不改变。
static_prio和nice之间的关系
内核使用0~139数值表示优先级,数值越低优先级越高。其中0~99给实时进程使用,100~139给普通进程(SCHED_NORMAL/SCHED_BATCH)使用。
用户空间nice传递的变量映射到普通进程优先级,即100~139。
关于nice和prio之间的转换,内核提供NICE_TO_PRIO和PRIO_TO_NICE两个宏。

#define MAX_USER_RT_PRIO 100
#define MAX_RT_PRIO MAX_USER_RT_PRIO #define MAX_PRIO (MAX_RT_PRIO + NICE_WIDTH)
#define DEFAULT_PRIO (MAX_RT_PRIO + NICE_WIDTH / 2) /*
* Convert user-nice values [ -20 ... 0 ... 19 ]
* to static priority [ MAX_RT_PRIO..MAX_PRIO-1 ],
* and back.
*/
#define NICE_TO_PRIO(nice) ((nice) + DEFAULT_PRIO)
#define PRIO_TO_NICE(prio) ((prio) - DEFAULT_PRIO) /*
* 'User priority' is the nice value converted to something we
* can work with better when scaling various scheduler parameters,
* it's a [ 0 ... 39 ] range.
*/
#define USER_PRIO(p) ((p)-MAX_RT_PRIO)
#define TASK_USER_PRIO(p) USER_PRIO((p)->static_prio)
#define MAX_USER_PRIO (USER_PRIO(MAX_PRIO))
1.2 计算权重
内核中使用struct load_weight数据结构来记录调度实体的权重信息。
权重信息是根据优先级来计算的,通过task_struct->se.load来获取进程的权重信息。
因为权重仅适用于普通进程,普通进程的nice对应范围是-20~19。
struct task_struct {
...
struct sched_entity se;
...
};
struct sched_entity {
struct load_weight load; /* for load-balancing */
...
};
struct load_weight {
unsigned long weight;----------------调度实体的权重
u32 inv_weight;----------------------inverse weight,是全中一个中间计算结果。
};
set_load_weight()设置进程的权重值,通过task_struct->static_prio从prio_to_weight[]和prio_to_wmult[]获取。
static void set_load_weight(struct task_struct *p)
{
int prio = p->static_prio - MAX_RT_PRIO;---------------------权重值取决于static_prio,减去100而不是120,对应了下面数组下标。
struct load_weight *load = &p->se.load; /*
* SCHED_IDLE tasks get minimal weight:
*/
if (p->policy == SCHED_IDLE) {
load->weight = scale_load(WEIGHT_IDLEPRIO);-------------IDLE调度策略进程使用固定优先级权重,取最低普通优先级权重的1/5。
load->inv_weight = WMULT_IDLEPRIO;----------------------取最低普通优先级反转权重的5倍。
return;
} load->weight = scale_load(prio_to_weight[prio]);
load->inv_weight =prio_to_wmult[prio];
}
nice从-20~19,共40个等级,nice值越高优先级越低。
进程每提高一个优先级,则增加10%CPU时间,同时另一个进程减少10%时间,他们之间的关系从原来的1:1变成了1.1:0.9=1.22。
因此相同优先级之间的关系使用系统1.25来表示。
假设A和B进程nice都为0,权重都是1024.
A的nice变为1,B不变。那么B获得55%运行时间,A获得45%运行时间。A的权重就变成了A/(A+1024)=9/(9+11),A=1024*9/11=。
但是Linux并不是严格按照1.22系数来计算的,而是近似1.25。
A的权重值就变成了1024/1.25≈。
prio_to_weight[]以nice-0为基准权重1024,然后将nice从-20~19预先计算出。set_load_weight()就可以通过优先级得到进程对应的权重。
prio_to_wmult[]为了方便计算vruntime而预先计算结果。
inv_weight=232/weight
static const int prio_to_weight[] = {
/* -20 */ , , , , ,
/* -15 */ , , , , ,
/* -10 */ , , , , ,
/* -5 */ , , , , ,
/* 0 */ , , , , ,
/* 5 */ , , , , ,
/* 10 */ , , , , ,
/* 15 */ , , , , ,
};
static const u32 prio_to_wmult[] = {
/* -20 */ , , , , ,
/* -15 */ , , , , ,
/* -10 */ , , , , ,
/* -5 */ , , , , ,
/* 0 */ , , , , ,
/* 5 */ , , , , ,
/* 10 */ , , , , ,
/* 15 */ , , , , ,
};
1.2.1 优先级和权重关系实验
下面设计一下CPU intensive的进程,然后设置不同优先级,再使用top查看他们实际得到的CPU执行事件。
这样就可以验证他们的优先级和权重关系。
首先需要将这些进程固定到一个CPU上,然后调整优先级。
#define _GNU_SOURCE
#include <stdio.h>
#include <sched.h>
#include <stdlib.h>
#include <unistd.h>
#include <sys/resource.h> int main(void)
{
int i, pid;
cpu_set_t mask; //Set CPU affinity.
CPU_ZERO(&mask);
CPU_SET(, &mask);
if(sched_setaffinity(, sizeof(cpu_set_t), &mask) == -)
{
exit(EXIT_FAILURE);
} pid = getpid();
setpriority(PRIO_PROCESS, pid, -20); while()
{
} return ;
}
1.2.1.1 -20和-19关系
理论上-20和-19的CPU占比应该是88761:71755=1.24:1=55.3/44.7。
来看一下实际执行效果,符合预期。

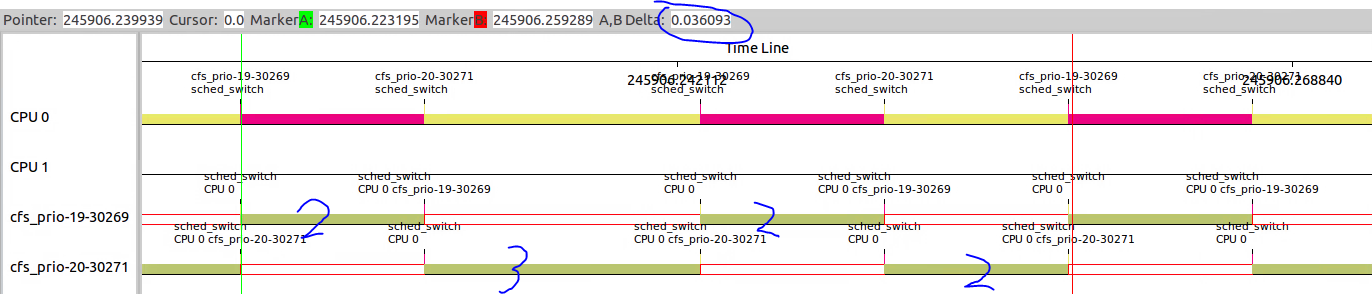
通过kernelshark查看一下他们之间的关系,两个进程之间是有规律的。
-20执行了2+3tick,-19执行了2+2tick,两者之间的比例也接近1.25。符合预期。
1.2.1.2 -20、-19、-18三者关系呢?
这三者之间的比例关系应该是88761:71755:56483=1.57:1.27:1。
实际结果是41.2:32.9:25.9=1.59:1.27:1,符合预期。

1.2.1.3 -20、-19、-18、0四者关系呢?
88761:71755:56483:1024=1.57:1.27:1:0.018
实际结果是40.8:33.0:25.8:0.4=1.58:1.28:1:0.016,基本符合预期。
为什么不以nice-0为基准呢?首先在-20、-19、-18存在的情况下,nice-0的误差显得特别大,另一个系统还存在其它很多nice-0的进程。

1.3 计算vrtime
CFS中所谓的Fair是vrtime的,而不是实际时间的平等。
CFS调度器抛弃以前固定时间片和固定调度周期的算法,而采用进程权重值的比重来量化和计算实际运行时间。
引入虚拟时钟概念,每个进程虚拟时间是实际运行时间相对Nice值为0的权重比例值。
Nice值小的进程,优先级高且权重大,其虚拟时钟比真实时钟跑得慢,所以可以获得更多的实际运行时间。
反之,Nice值大的进程,优先级低权重小,获得的实际运行时间也更少。
CFS选择虚拟时钟跑得慢的进程,而不是实际运行时间运行的少的进程。
vruntime=delta_exec*nice_0_weight/weight
vruntime表示进程的虚拟运行时间,delta_exec表示进程实际运行时间,nice_0_weight表示nice为0权重值,weight表示该进程的权重值,可以通过prio_to_weight[]获取。
vruntime=delta_exec*nice_0_weight*232/weight>>32
其中232/weight可以用inv_weight来表示,其中inv_weight可以从prio_to_wmult[]中获取。
vruntime=delta_exec*nice_0_weight*inv_weight>>32
calc_delta_fair()是计算虚拟时间的函数,其返回值是虚拟时间。
__calc_delta()是计算vruntime的核心,delta_exec是进程实际运行时间,weight是nice_0_weight,lw是对应进程的load_weight,里面包含了其inv_weight值。
static inline u64 calc_delta_fair(u64 delta, struct sched_entity *se)
{
if (unlikely(se->load.weight != NICE_0_LOAD))----如果当前进程权重是NICE_0_WEIGHT,虚拟时间就是delta,不需要__calc_delta()计算。
delta = __calc_delta(delta, NICE_0_LOAD, &se->load); return delta;
} static u64 __calc_delta(u64 delta_exec, unsigned long weight, struct load_weight *lw)
{
u64 fact = scale_load_down(weight);--------------fact等于weight。
int shift = WMULT_SHIFT;-------------------------WMULT_SHIFT等于32 __update_inv_weight(lw);-------------------------更新load_weight->inv_weight,一般情况下已经设置,不需要进行操作。 if (unlikely(fact >> )) {----------------------一般fact>>32为0,所以跳过
while (fact >> ) {
fact >>= ;
shift--;
}
} /* hint to use a 32x32->64 mul */
fact = (u64)(u32)fact * lw->inv_weight;----------此处相当于nice_0_weight*inv_weight while (fact >> ) {
fact >>= ;
shift--;
} return mul_u64_u32_shr(delta_exec, fact, shift);----此处相当于delta_exec*(nice_0_weight*inv_weight)>>32。
}
优先级越低的进程inv_weight值越大,其它nice_0_weight和位置都是一样的。
所以相同的delta_exec情况下,优先级越低vruntime越大。
cfs总是在红黑树中选择vrunime最小的进程进行调度,优先级高的进程在相同实际运行时间的情况下vruntime最小,所以总会被优先选择。但是随着vruntime的增长,优先级低的进程也有机会运行。
1.4 负载计算
内核中计算CPU负载的方法是PELT(Per-Entity Load Tracing),不仅考虑进程权重,而且跟踪每个调度实体的负载情况。
sched_entity结构中有一个struct sched_avg用于描述进程的负载。
runnable_sum:表示该调度实体在就绪队列里(sched_entity->on_rq==1)可运行状态的总时间。包括两部分,一是正在运行的时间,即running时间;二是在就绪队列中等待的时间。进程进入就绪队列时(调用enqueue_entity()),on_rq被置为1,但该进程因为睡眠等原因退出就绪队列时(调用dequeue_entity()),on_rq会被清0,因此runnable_sum就是统计进程在就绪队列的时间。
runnable_period:可以理解为该调度实体在系统中的总时间,period是指一个周期period为1024us。当一个进程fork出来后,无论是否在就绪队列中,runnable_period一直在递增。
runnable_avg_sum:考虑历史数据对负载的影响,采用衰减系统来计算平均复杂,调度实体在就绪队列里可运行状态下总的衰减累加时间。
runnable_avg_period:调度实体在系统中总的衰减累加时间。
last_runnable_update:最近更新load的时间点,用于计算时间间隔。
load_avg_contrib:进程平均负载的贡献度。
struct sched_avg {
/*
* These sums represent an infinite geometric series and so are bound
* above by 1024/(1-y). Thus we only need a u32 to store them for all
* choices of y < 1-2^(-32)*1024.
*/
u32 runnable_avg_sum, runnable_avg_period;
u64 last_runnable_update;
s64 decay_count;
unsigned long load_avg_contrib;
};
struct sched_entity {
...
#ifdef CONFIG_SMP
/* Per entity load average tracking */
structsched_avg avg;
#endif
}
1.4.1 衰减因子
将1024us时间跨度算成一个周期,period简称PI。
一个PI周期内对系统负载的贡献除了权重外,还有PI周期内可运行的时间,包括运行时间或等待CPU时间。
一个理想的计算方式是:统计多个实际的PI周期,并使用一个衰减系数来计算过去的PI周期对付贼的贡献。
Li是一个调度实体在第i个周期内的负载贡献。那么一个调度实体负载综合计算公式如下:
L=L0+L1*y+L2*y2+L3*y3...+L32*y32+...
调度实体的负载需要考虑时间因素,不能只考虑当前负载,还要考虑其在过去一段时间表现。
一般认为过去第32个周期的负载减半,所以y32=0.5,得出衰减因子y=0.978左右。
同时内核不需要数组来存放过去PI个周期负载贡献,只需要用过去周期贡献总和乘以衰减系数y,并加上当前时间点的负载L0即可。
下表对衰减因子乘以232,计算完成后再右移32位。如下,就将原来衰减因子的浮点元算转换成乘法和移位操作。
L*yn = (L*yn*232)>>32 = (L*(0.978)n*232)>>32 = L*runnable_avg_yN_inv[n]>>32
runnable_avg_yN_inv[n]是计算第n个周期的衰减值,在实际使用中需要计算n个周期的负载累积贡献值。
runnable_avg_yN_sum[n] = 1024*(y + y2 + y3 + ... + yn)
取1024是因为一个周期是1024微秒。
下面两个数组虽然都是计算负载累计,但是runnable_avg_yN_inv[]使计算某一个周期的贡献值,runnable_avg_yN_sum[n]是计算n个周期的贡献值。
runnable_avg_yN_inv[]共32个成员,runnable_avg_yN_sum[]共33个成员。
static const u32 runnable_avg_yN_inv[] = {
0xffffffff, 0xfa83b2da, 0xf5257d14, 0xefe4b99a, 0xeac0c6e6, 0xe5b906e6,
0xe0ccdeeb, 0xdbfbb796, 0xd744fcc9, 0xd2a81d91, 0xce248c14, 0xc9b9bd85,
0xc5672a10, 0xc12c4cc9, 0xbd08a39e, 0xb8fbaf46, 0xb504f333, 0xb123f581,
0xad583ee9, 0xa9a15ab4, 0xa5fed6a9, 0xa2704302, 0x9ef5325f, 0x9b8d39b9,
0x9837f050, 0x94f4efa8, 0x91c3d373, 0x8ea4398a, 0x8b95c1e3, 0x88980e80,
0x85aac367, 0x82cd8698,
};
static const u32 runnable_avg_yN_sum[] = {
, , , , , , , , , , ,
,,,,,,,,,,,
,,,,,,,,,,,
};
这两个参数分别对应decay_load()和__compute_runnable_contrib()。
decay_load()根据一个load值和周期序号n,返回衰减后的load值。
__compute_runnable_contrib()只有一个参数过去的periods周期数目,返回累计衰减load值。
1.4.2 update_entity_load_avg()
update_entity_load_avg()主要更新struct sched_avg结构体成员,其中__update_entity_runnable_avg()更新了last_runnable_update、runnable_avg_sum和runnable_avg_period三个数据;
__update_entity_load_avg_contrib()更新了load_avg_contrib;最后同时更新了cfs_rq->runnable_load_avg。
static inline void update_entity_load_avg(struct sched_entity *se,
int update_cfs_rq)
{
struct cfs_rq *cfs_rq = cfs_rq_of(se);
long contrib_delta;
u64 now; /*
* For a group entity we need to use their owned cfs_rq_clock_task() in
* case they are the parent of a throttled hierarchy.
*/
if (entity_is_task(se))
now = cfs_rq_clock_task(cfs_rq);
else
now = cfs_rq_clock_task(group_cfs_rq(se)); if (!__update_entity_runnable_avg(now, &se->avg, se->on_rq))-------更新sched_avg的三个参数:last_runnable_update、runnable_avg_sum、runnable_avg_period。如果上次更新到本次不足1024
us,不做衰减计算,不计算负载贡献度。
return; contrib_delta =__update_entity_load_avg_contrib(se);--------------计算本次更新贡献度,更新到load_avg_contrib中。 if (!update_cfs_rq)
return; if (se->on_rq)
cfs_rq->runnable_load_avg += contrib_delta;--------------------累加到cfs_rq->runnable_laod_avg中
else
subtract_blocked_load_contrib(cfs_rq, -contrib_delta);
} static __always_inline int __update_entity_runnable_avg(u64 now,
struct sched_avg *sa,
int runnable)--------------------------------runnable表示该进程是否在就绪队列上接受调度
{
u64 delta, periods;
u32 runnable_contrib;
int delta_w, decayed = ; delta = now - sa->last_runnable_update;------------------------------上次更新负载到本次更新的间隔,单位是ns。
/*
* This should only happen when time goes backwards, which it
* unfortunately does during sched clock init when we swap over to TSC.
*/
if ((s64)delta < ) {
sa->last_runnable_update = now;
return ;
} /*
* Use 1024ns as the unit of measurement since it's a reasonable
* approximation of 1us and fast to compute.
*/
delta >>= ;--------------------------------------------------------delta单位变成近似1微秒
if (!delta)
return ;
sa->last_runnable_update = now; /* delta_w is the amount already accumulated against our next period */
delta_w = sa->runnable_avg_period % ;----------------------------runnable_avg_period是上一次更新时的总周期数,delta_w是上一次周周期数不能凑成一个周期的剩余时间,单位是微秒。
if (delta + delta_w >= ) {---------------------------------------如果时间大于一个周期,就需要进行衰减计算。
/* period roll-over */
decayed = ; /*
* Now that we know we're crossing a period boundary, figure
* out how much from delta we need to complete the current
* period and accrue it.
*/
delta_w = - delta_w;
if (runnable)
sa->runnable_avg_sum += delta_w;
sa->runnable_avg_period += delta_w; delta -= delta_w; /* Figure out how many additional periods this update spans */
periods = delta / ;---------------------------------------------本次更新和上次更新之间经历的周期数periods
delta %= ; sa->runnable_avg_sum = decay_load(sa->runnable_avg_sum,
periods + );-------------------------------------分别计算第periods+1个周期的runnable_avg_sum和runnable_avg_period的衰减。
sa->runnable_avg_period = decay_load(sa->runnable_avg_period,
periods + ); /* Efficiently calculate \sum (1..n_period) 1024*y^i */
runnable_contrib =__compute_runnable_contrib(periods);-------------得到过去periods个周期的累计衰减。
if (runnable)
sa->runnable_avg_sum += runnable_contrib;
sa->runnable_avg_period += runnable_contrib;
} /* Remainder of delta accrued against u_0` */---------------------------不能凑成完成周期的部分直接进行相加。
if (runnable)
sa->runnable_avg_sum += delta;
sa->runnable_avg_period += delta; return decayed;---------------------------------------------------------decayed表示是否进行了衰减计算
} static __always_inline u64 decay_load(u64 val, u64 n)----------------------val表示n个周期前的负载值,n表示第n个周期。返回结果为val*yn,变成查表(val*runnable_avg_yN_inv[n])>>32。
{
unsigned int local_n; if (!n)
return val;---------------------------------------------------------n=0:表示当前周期,不衰减。
else if (unlikely(n > LOAD_AVG_PERIOD * ))----------------------------n>=2016:LOAD_AVG_PERIOD=32,因此n超过2016就认为衰减值变为0。
return ; /* after bounds checking we can collapse to 32-bit */
local_n = n; /*
* As y^PERIOD = 1/2, we can combine
* y^n = 1/2^(n/PERIOD) * y^(n%PERIOD)
* With a look-up table which covers y^n (n<PERIOD)
*
* To achieve constant time decay_load.
*/
if (unlikely(local_n >= LOAD_AVG_PERIOD)) {-----------------------------32=<n<2016:每32个周期衰减1/2,即val右移一位。剩下周期数存入local_n。
val >>= local_n / LOAD_AVG_PERIOD;
local_n %= LOAD_AVG_PERIOD;
} val *=runnable_avg_yN_inv[local_n];------------------------------------0<n<32:根据local_n查表得到衰减值
/* We don't use SRR here since we always want to round down. */
return val >> ;-------------------------------------------------------最终结果右移32位,归一化。
} static u32 __compute_runnable_contrib(u64 n)
{
u32 contrib = ; if (likely(n <= LOAD_AVG_PERIOD))--------------------------------------n<=32:直接查表得到结果。
returnrunnable_avg_yN_sum[n];
else if (unlikely(n >= LOAD_AVG_MAX_N))--------------------------------n>=345:直接取最大值47742,这个值也是一共345个周期的累计衰减。
return LOAD_AVG_MAX; /* Compute \Sum k^n combining precomputed values for k^i, \Sum k^j */
do {-------------------------------------------------------------------以LOAD_AVG_PERIOD为步长,计算过去n/32个32周期的累计衰减
contrib /= ; /* y^LOAD_AVG_PERIOD = 1/2 */
contrib += runnable_avg_yN_sum[LOAD_AVG_PERIOD];-------------------都取n=32的情况 n -= LOAD_AVG_PERIOD;
} while (n > LOAD_AVG_PERIOD); contrib = decay_load(contrib, n);-------------------------------------还需经过n过周期衰减,因此经过decay_load()得到过去“n/32个32周期”的最终累计衰减。
return contrib + runnable_avg_yN_sum[n];------------------------------不能凑成32周期单独计算并和contrib累加得到最终的结果。
} static long __update_entity_load_avg_contrib(struct sched_entity *se)
{
long old_contrib = se->avg.load_avg_contrib; if (entity_is_task(se)) {
__update_task_entity_contrib(se);
} else {
__update_tg_runnable_avg(&se->avg, group_cfs_rq(se));
__update_group_entity_contrib(se);
} return se->avg.load_avg_contrib - old_contrib;
} static inline void __update_task_entity_contrib(struct sched_entity *se)
{
u32 contrib; /* avoid overflowing a 32-bit type w/ SCHED_LOAD_SCALE */
contrib = se->avg.runnable_avg_sum * scale_load_down(se->load.weight);
contrib /= (se->avg.runnable_avg_period + );
se->avg.load_avg_contrib = scale_load(contrib);-------------------------更新sched_avg->load_avg_contrib
}
load_avg_contrib = (runnable_avg_sum*weight)/runnable_avg_period
可见一个调度实体的平均负载和以下3个因素相关:
- 调度实体的权重weight
- 调度实体可运行状态下的总衰减累加时间runnable_avg_sum
- 调度实体在调度器中总衰减累加时间runnable_avg_period
runnable_avg_sum越接近runnable_avg_period,则平均负载越大,表示调度实体一直在占用CPU。
2. 进程创建
2.1 sched_entity、rq、cfs_rq
struct sched_entity内嵌在task_struct中,称为调度实体,描述进程作为一个调度实体参与调度的所需要的所有信息。
struct sched_entity {
struct load_weight load; /* for load-balancing */----------------调度实体的权重。
struct rb_node run_node;--------------------------------------------表示调度实体在红黑树中的节点
struct list_head group_node;
unsigned int on_rq;-------------------------------------------------表示该调度实体是否在就绪队列中接受调度
u64 exec_start;
u64 sum_exec_runtime;
u64 vruntime;---------------------------------------------------表示本调度实体的虚拟运行时间
u64 prev_sum_exec_runtime;
u64 nr_migrations;
#ifdef CONFIG_SCHEDSTATS
struct sched_statistics statistics;
#endif
#ifdef CONFIG_FAIR_GROUP_SCHED
int depth;
struct sched_entity *parent;
/* rq on which this entity is (to be) queued: */
struct cfs_rq *cfs_rq;
/* rq "owned" by this entity/group: */
struct cfs_rq *my_q;-------------------------------------------------如果my_q不为null表示当前调度实体是调度组,而不是单个进程。
#endif
#ifdef CONFIG_SMP
/* Per-entity load-tracking */
struct sched_avg avg;-----------------------------------------------------表示调度实体平均负载信息。
#endif
};
strcut sched_entity是per-task的,struct rq是per-cpu的。
系统中每个CPU就有一个struct rq数据结构,this_rq()可以获取当前CPU的就绪队列struct rq。
struct rq是描述CPU的通用就绪队列,rq数据结构记录了一个就绪队列所需要的全部信息,包括一个cfs就绪队列数据结构strct cfs_rq、一个实时调度器就绪队列数据结构struct rt_rq和一个deadline就绪队列数据结构structdl_rq。
struct rq {
/* runqueue lock: */
raw_spinlock_t lock;
/*
* nr_running and cpu_load should be in the same cacheline because
* remote CPUs use both these fields when doing load calculation.
*/
unsigned int nr_running;-------------------------------------运行进程个数
#ifdef CONFIG_NUMA_BALANCING
unsigned int nr_numa_running;
unsigned int nr_preferred_running;
#endif
#define CPU_LOAD_IDX_MAX 5
unsigned long cpu_load[CPU_LOAD_IDX_MAX];
unsigned long last_load_update_tick;
#ifdef CONFIG_NO_HZ_COMMON
u64 nohz_stamp;
unsigned long nohz_flags;
#endif
#ifdef CONFIG_NO_HZ_FULL
unsigned long last_sched_tick;
#endif
/* capture load from *all* tasks on this cpu: */
struct load_weight load;---------------------------------------就绪队列权重。
unsigned long nr_load_updates;
u64 nr_switches;
structcfs_rqcfs;---------------------------------------------cfs就绪队列
structrt_rqrt;-----------------------------------------------rt就绪队列
struct dl_rq dl;-----------------------------------------------deadline就绪队列
#ifdef CONFIG_FAIR_GROUP_SCHED
/* list of leaf cfs_rq on this cpu: */
struct list_head leaf_cfs_rq_list;
struct sched_avg avg;
#endif /* CONFIG_FAIR_GROUP_SCHED */
/*
* This is part of a global counter where only the total sum
* over all CPUs matters. A task can increase this counter on
* one CPU and if it got migrated afterwards it may decrease
* it on another CPU. Always updated under the runqueue lock:
*/
unsigned long nr_uninterruptible;
struct task_struct *curr, *idle, *stop;
unsigned long next_balance;
struct mm_struct *prev_mm;
unsigned int clock_skip_update;
u64 clock;
u64 clock_task;
atomic_t nr_iowait;
#ifdef CONFIG_SMP
struct root_domain *rd;
struct sched_domain *sd;
unsigned long cpu_capacity;
unsigned char idle_balance;
/* For active balancing */
int post_schedule;
int active_balance;
int push_cpu;
struct cpu_stop_work active_balance_work;
/* cpu of this runqueue: */
int cpu;
int online;
struct list_head cfs_tasks;
u64 rt_avg;
u64 age_stamp;
u64 idle_stamp;
u64 avg_idle;
/* This is used to determine avg_idle's max value */
u64 max_idle_balance_cost;
#endif
#ifdef CONFIG_IRQ_TIME_ACCOUNTING
u64 prev_irq_time;
#endif
#ifdef CONFIG_PARAVIRT
u64 prev_steal_time;
#endif
#ifdef CONFIG_PARAVIRT_TIME_ACCOUNTING
u64 prev_steal_time_rq;
#endif
/* calc_load related fields */
unsigned long calc_load_update;
long calc_load_active;
#ifdef CONFIG_SCHED_HRTICK
#ifdef CONFIG_SMP
int hrtick_csd_pending;
struct call_single_data hrtick_csd;
#endif
struct hrtimer hrtick_timer;
#endif
#ifdef CONFIG_SCHEDSTATS
/* latency stats */
struct sched_info rq_sched_info;
unsigned long long rq_cpu_time;
/* could above be rq->cfs_rq.exec_clock + rq->rt_rq.rt_runtime ? */
/* sys_sched_yield() stats */
unsigned int yld_count;
/* schedule() stats */
unsigned int sched_count;
unsigned int sched_goidle;
/* try_to_wake_up() stats */
unsigned int ttwu_count;
unsigned int ttwu_local;
#endif
#ifdef CONFIG_SMP
struct llist_head wake_list;
#endif
#ifdef CONFIG_CPU_IDLE
/* Must be inspected within a rcu lock section */
struct cpuidle_state *idle_state;
#endif
};
struct cfs_rq {
struct load_weight load;------------------------------------cfs就绪队列的权重
unsigned int nr_running, h_nr_running;
u64 exec_clock;
u64 min_vruntime;-------------------------------------------跟踪该就绪队列红黑树中最小的vruntime值。
#ifndef CONFIG_64BIT
u64 min_vruntime_copy;
#endif
struct rb_root tasks_timeline;------------------------------运行队列红黑树根。
struct rb_node *rb_leftmost;--------------------------------红黑树最左边节点,也即为最小vruntime时间的节点,单进程选择下一个进程来运行时,就选择这个。
/*
* 'curr' points to currently running entity on this cfs_rq.
* It is set to NULL otherwise (i.e when none are currently running).
*/
struct sched_entity*curr, *next, *last, *skip;
#ifdef CONFIG_SCHED_DEBUG
unsigned int nr_spread_over;
#endif
#ifdef CONFIG_SMP
/*
* CFS Load tracking
* Under CFS, load is tracked on a per-entity basis and aggregated up.
* This allows for the description of both thread and group usage (in
* the FAIR_GROUP_SCHED case).
*/
unsigned long runnable_load_avg, blocked_load_avg;----------runnable_load_avg跟踪该就绪队列中总平均负载。
atomic64_t decay_counter;
u64 last_decay;
atomic_long_t removed_load;
#ifdef CONFIG_FAIR_GROUP_SCHED
/* Required to track per-cpu representation of a task_group */
u32 tg_runnable_contrib;
unsigned long tg_load_contrib;
/*
* h_load = weight * f(tg)
*
* Where f(tg) is the recursive weight fraction assigned to
* this group.
*/
unsigned long h_load;
u64 last_h_load_update;
struct sched_entity *h_load_next;
#endif /* CONFIG_FAIR_GROUP_SCHED */
#endif /* CONFIG_SMP */
#ifdef CONFIG_FAIR_GROUP_SCHED
struct rq *rq; /* cpu runqueue to which this cfs_rq is attached */----本cfs_rq附着的struct rq
/*
* leaf cfs_rqs are those that hold tasks (lowest schedulable entity in
* a hierarchy). Non-leaf lrqs hold other higher schedulable entities
* (like users, containers etc.)
*
* leaf_cfs_rq_list ties together list of leaf cfs_rq's in a cpu. This
* list is used during load balance.
*/
int on_list;
struct list_head leaf_cfs_rq_list;
struct task_group *tg; /* group that "owns" this runqueue */----------组调度数据结构
#ifdef CONFIG_CFS_BANDWIDTH
int runtime_enabled;
u64 runtime_expires;
s64 runtime_remaining;
u64 throttled_clock, throttled_clock_task;
u64 throttled_clock_task_time;
int throttled, throttle_count;
struct list_head throttled_list;
#endif /* CONFIG_CFS_BANDWIDTH */
#endif /* CONFIG_FAIR_GROUP_SCHED */
};
通过task_struct可以找到对应的cfs_rq,struct task_struct通过task_thread_info()找到thread_info;
通过struct thread_info得到cpu,通过cpu_rq()找到对应CPU的struct rq,进而找到对应的struct cfs_rq。
#define task_thread_info(task) ((struct thread_info *)(task)->stack) static inline unsigned int task_cpu(const struct task_struct *p)
{
return task_thread_info(p)->cpu;
} DECLARE_PER_CPU_SHARED_ALIGNED(struct rq, runqueues); #define cpu_rq(cpu) (&per_cpu(runqueues, (cpu)))
#define this_rq() this_cpu_ptr(&runqueues)--------------------当前CPU的struct rq
#define task_rq(p) cpu_rq(task_cpu(p))----------------------指定CPU的struct rq static inline struct cfs_rq *task_cfs_rq(struct task_struct *p)
{
return &task_rq(p)->cfs;
}
2.2 fair_sched_class
struct sched_class是调度类操作方法,CFS调度器的调度类fair_sched_class定义了CFS相关操作方法。
这些方法的具体介绍会在下面一一介绍。
const struct sched_class fair_sched_class = {
.next = &idle_sched_class,
.enqueue_task =enqueue_task_fair,
.dequeue_task = dequeue_task_fair,
.yield_task = yield_task_fair,
.yield_to_task = yield_to_task_fair,
.check_preempt_curr =check_preempt_wakeup,
.pick_next_task =pick_next_task_fair,
.put_prev_task = put_prev_task_fair,
#ifdef CONFIG_SMP
.select_task_rq = select_task_rq_fair,
.migrate_task_rq = migrate_task_rq_fair,
.rq_online = rq_online_fair,
.rq_offline = rq_offline_fair,
.task_waking = task_waking_fair,
#endif
.set_curr_task =set_curr_task_fair,
.task_tick =task_tick_fair,
.task_fork =task_fork_fair,
.prio_changed = prio_changed_fair,
.switched_from = switched_from_fair,
.switched_to = switched_to_fair,
.get_rr_interval = get_rr_interval_fair,
.update_curr = update_curr_fair,
#ifdef CONFIG_FAIR_GROUP_SCHED
.task_move_group = task_move_group_fair,
#endif
};
2.3 进程创建
进程创建由do_fork()函数来完成,do_fork-->copy_process参与了进程调度相关初始化。
copy_process()
sched_fork()
__sched_fork()
fair_sched_class->task_fork()->task_fork_fair()
__set_task_cpu()
update_curr()
place_entity()
wake_up_new_task()
activate_task()
enqueue_task
fair_sched_class->enqueue_task-->enqueue_task_fair()
2.3.1 sched_fork()
sched_fork()调用__sched_fork()对struct task_struct进行初始化,
int sched_fork(unsigned long clone_flags, struct task_struct *p)
{
unsigned long flags;
int cpu = get_cpu();--------------------------------------------------禁止任务抢占并且获取cpu序号 __sched_fork(clone_flags, p);
p->state = TASK_RUNNING;----------------------------------------------此时并没有真正运行,还没有加入到调度器
p->prio = current->normal_prio; /*
* Revert to default priority/policy on fork if requested.
*/
if (unlikely(p->sched_reset_on_fork)) {-------------------------------如果sched_reset_on_fork为true,重置policy、static_prio、prio、weight、inv_weight等。
if (task_has_dl_policy(p) || task_has_rt_policy(p)) {
p->policy = SCHED_NORMAL;
p->static_prio = NICE_TO_PRIO();
p->rt_priority = ;
} else if (PRIO_TO_NICE(p->static_prio) < )
p->static_prio = NICE_TO_PRIO(); p->prio = p->normal_prio = __normal_prio(p);
set_load_weight(p);
p->sched_reset_on_fork = ;
} if (dl_prio(p->prio)) {
put_cpu();
return -EAGAIN;
} else if (rt_prio(p->prio)) {
p->sched_class = &rt_sched_class;
} else {
p->sched_class = &fair_sched_class;-------------------------------根据task_struct->prio选择调度器类,
} if (p->sched_class->task_fork)
p->sched_class->task_fork(p);-------------------------------------调用调度器类的task_fork方法,cfs对应task_fork_fair()。 raw_spin_lock_irqsave(&p->pi_lock, flags);
set_task_cpu(p, cpu);-------------------------------------------------将p指定到cpu上运行,如果task_struct->stack->cpu和当前所在cpu不一致,需要将cpu相关设置到新CPU上。
raw_spin_unlock_irqrestore(&p->pi_lock, flags); #if defined(CONFIG_SCHEDSTATS) || defined(CONFIG_TASK_DELAY_ACCT)
if (likely(sched_info_on()))
memset(&p->sched_info, , sizeof(p->sched_info));
#endif
#if defined(CONFIG_SMP)
p->on_cpu = ;
#endif
init_task_preempt_count(p);-------------------------------------------初始化preempt_count
#ifdef CONFIG_SMP
plist_node_init(&p->pushable_tasks, MAX_PRIO);
RB_CLEAR_NODE(&p->pushable_dl_tasks);
#endif put_cpu();------------------------------------------------------------启用任务抢占
return ;
}
__sched_fork()对task_struct数据结构进行初始值设定。
static void __sched_fork(unsigned long clone_flags, struct task_struct *p)
{
p->on_rq = ; p->se.on_rq = ;
p->se.exec_start = ;
p->se.sum_exec_runtime = ;
p->se.prev_sum_exec_runtime = ;
p->se.nr_migrations = ;
p->se.vruntime = ;
#ifdef CONFIG_SMP
p->se.avg.decay_count = ;
#endif
INIT_LIST_HEAD(&p->se.group_node); #ifdef CONFIG_SCHEDSTATS
memset(&p->se.statistics, , sizeof(p->se.statistics));
#endif RB_CLEAR_NODE(&p->dl.rb_node);
init_dl_task_timer(&p->dl);
__dl_clear_params(p); INIT_LIST_HEAD(&p->rt.run_list); #ifdef CONFIG_PREEMPT_NOTIFIERS
INIT_HLIST_HEAD(&p->preempt_notifiers);
#endif...
}
task_fork_fair()参数是新创建的进程,
static void task_fork_fair(struct task_struct *p)
{
struct cfs_rq *cfs_rq;
struct sched_entity *se = &p->se, *curr;
int this_cpu = smp_processor_id();--------------------------获取当前cpu id
struct rq *rq = this_rq();
unsigned long flags; raw_spin_lock_irqsave(&rq->lock, flags); update_rq_clock(rq); cfs_rq = task_cfs_rq(current);------------------------------获取当前进程所在cpu的cfs_rq
curr = cfs_rq->curr; /*
* Not only the cpu but also the task_group of the parent might have
* been changed after parent->se.parent,cfs_rq were copied to
* child->se.parent,cfs_rq. So call __set_task_cpu() to make those
* of child point to valid ones.
*/
rcu_read_lock();
__set_task_cpu(p, this_cpu);--------------------------------将进程p和当前CUP绑定,p->wake_cpu在后续唤醒该进程时会用到这个成员。
rcu_read_unlock(); update_curr(cfs_rq);----------------------------------------更新当前调度实体的cfs_rq->curr信息 if (curr)
se->vruntime = curr->vruntime;
place_entity(cfs_rq, se, );--------------------------------cfs_rq是父进程对应的cfs就绪队列,se对应的是进程p调度实体,initial为1。
if (sysctl_sched_child_runs_first && curr && entity_before(curr, se)) {
/*
* Upon rescheduling, sched_class::put_prev_task() will place
* 'current' within the tree based on its new key value.
*/
swap(curr->vruntime, se->vruntime);
resched_curr(rq);
} se->vruntime -= cfs_rq->min_vruntime; raw_spin_unlock_irqrestore(&rq->lock, flags);
}
set_task_cpu()将进程和指定的cpu绑定。
update_curr()是cfs调度器核心函数,主要更新cfs_rq->curr,即当前调度实体。
主要更新了调度实体的vruntime、sum_exec_runtime、exec_start等等。
void set_task_cpu(struct task_struct *p, unsigned int new_cpu)
{
if (task_cpu(p) != new_cpu) {
if (p->sched_class->migrate_task_rq)
p->sched_class->migrate_task_rq(p);
p->se.nr_migrations++;
perf_event_task_migrate(p);
}
__set_task_cpu(p, new_cpu);
}
static inline void __set_task_cpu(struct task_struct *p, unsigned int cpu)
{
set_task_rq(p, cpu);
#ifdef CONFIG_SMP
/*
* After ->cpu is set up to a new value, task_rq_lock(p, ...) can be
* successfuly executed on another CPU. We must ensure that updates of
* per-task data have been completed by this moment.
*/
smp_wmb();
task_thread_info(p)->cpu = cpu;
p->wake_cpu = cpu;
#endif
} static void update_curr(struct cfs_rq *cfs_rq)
{
struct sched_entity *curr = cfs_rq->curr;----------------------------------curr指向父进程调度实体。
u64 now = rq_clock_task(rq_of(cfs_rq));------------------------------------获取当前就绪队列保存的rq->clock_task值,该变量在每次时钟tick到来时更新。
u64 delta_exec; if (unlikely(!curr))
return; delta_exec = now - curr->exec_start;----------------------------------------delta_exec计算该进程从上次调用update_curr()函数到现在的时间差。
if (unlikely((s64)delta_exec <= ))
return; curr->exec_start = now; schedstat_set(curr->statistics.exec_max,
max(delta_exec, curr->statistics.exec_max)); curr->sum_exec_runtime += delta_exec;---------------------------------------sum_exec_runtime直接加上delta_exec。
schedstat_add(cfs_rq, exec_clock, delta_exec); curr->vruntime +=calc_delta_fair(delta_exec, curr);------------------------根据delta_exec和进程curr->load计算该进程的虚拟事件curr->vruntime。
update_min_vruntime(cfs_rq);------------------------------------------------更新当前cfs_rq->min_vruntime if (entity_is_task(curr)) {-------------------------------------------------如果curr->my_q为null,那么当前调度实体是进程
struct task_struct *curtask = task_of(curr); trace_sched_stat_runtime(curtask, delta_exec, curr->vruntime);
cpuacct_charge(curtask, delta_exec);
account_group_exec_runtime(curtask, delta_exec);
} account_cfs_rq_runtime(cfs_rq, delta_exec);
}
place_entity()参数cfs_rq是se对应进程的父进程对应的cfs就绪队列,se是新进程调度实体,initial为1。
place_entity()考虑当前se所在cfs_rq总体权重,然后更新se->vruntime。
static void
place_entity(struct cfs_rq *cfs_rq, struct sched_entity *se, int initial)
{
u64 vruntime = cfs_rq->min_vruntime;-----------------------------是单步递增的,用于跟踪整个cfs就绪队列中红黑树里最小的vruntime值。 if (initial && sched_feat(START_DEBIT))--------------------------如果当前进程用于fork新进程,那么这里会对新进程的vruntime做一些惩罚,因为新创建了一个新进程导致cfs运行队列权重发生了变化。
vruntime +=sched_vslice(cfs_rq, se);------------------------sched_vslice()计算得到虚拟时间作为惩罚值,累加到vruntime。 /* sleeps up to a single latency don't count. */
if (!initial) {
unsigned long thresh = sysctl_sched_latency; if (sched_feat(GENTLE_FAIR_SLEEPERS))
thresh >>= ; vruntime -= thresh;
}
se->vruntime = max_vruntime(se->vruntime, vruntime);--------------取se->vruntime和惩罚后的vruntime的最大值,方式vruntime回退。
} static u64 sched_vslice(struct cfs_rq *cfs_rq, struct sched_entity *se)
{
returncalc_delta_fair(sched_slice(cfs_rq, se), se);---------------根据sched_slice()计算得到的执行时间和se中的权重,计算出虚拟时间。
} static u64 sched_slice(struct cfs_rq *cfs_rq, struct sched_entity *se)
{
u64 slice = __sched_period(cfs_rq->nr_running + !se->on_rq);-------根据运行中进程数目计算就绪队列调度周期长度。 for_each_sched_entity(se) {----------------------------------------遍历当前se所在就绪队列上所有的调度实体。
struct load_weight *load;
struct load_weight lw; cfs_rq = cfs_rq_of(se);----------------------------------------通过sched_entity找到其所在的cfs_rq,进而获得cfs_rq->load。
load = &cfs_rq->load; if (unlikely(!se->on_rq)) {
lw = cfs_rq->load; update_load_add(&lw, se->load.weight);
load = &lw;
}
slice = __calc_delta(slice, se->load.weight, load);------------根据当前进程的权重来计算在cfs就绪队列总权重中可以瓜分的调度时间。
}
return slice;
}
unsigned int sysctl_sched_latency = 6000000ULL;
static unsigned int sched_nr_latency = 8;
unsigned int sysctl_sched_min_granularity = 750000ULL;
static u64 __sched_period(unsigned long nr_running)------------------计算CFS就绪对列中的一个调度周期的长度,可以理解为一个调度周期的时间片,根据当前运行的进程数目来计算。
{
u64 period = sysctl_sched_latency;---------------------------------cfs默认调度时间片6ms
unsigned long nr_latency = sched_nr_latency;-----------------------运行中的最大进程数目阈值 if (unlikely(nr_running > nr_latency)) {---------------------------如果运行中的进程数目大于8,按照每个进程最小的调度延时0.75ms计时,乘以进程数目来计算调度周期时间片。
period = sysctl_sched_min_granularity;
period *= nr_running;
} return period;
}
2.3.2 wake_up_new_task()
void wake_up_new_task(struct task_struct *p)
{
unsigned long flags;
struct rq *rq; raw_spin_lock_irqsave(&p->pi_lock, flags);
#ifdef CONFIG_SMP
set_task_cpu(p, select_task_rq(p, task_cpu(p), SD_BALANCE_FORK, ));------------重新选择CPU,有可能cpus_allowed在fork中被改变,或者之前前选择的CPU被关闭了。
#endif /* Initialize new task's runnable average */
init_task_runnable_average(p);
rq = __task_rq_lock(p);
activate_task(rq, p, );--------------------------------------------------------最终调用到enqueue_task_fair()将进程p添加到cfs就绪队列中。
p->on_rq = TASK_ON_RQ_QUEUED;
trace_sched_wakeup_new(p, true);
check_preempt_curr(rq, p, WF_FORK);---------------------------------------------检查是否有进程可以抢占当前正在运行的进程。
#ifdef CONFIG_SMP
if (p->sched_class->task_woken)
p->sched_class->task_woken(rq, p);
#endif
task_rq_unlock(rq, p, &flags);
} void activate_task(struct rq *rq, struct task_struct *p, int flags)
{
if (task_contributes_to_load(p))
rq->nr_uninterruptible--; enqueue_task(rq, p, flags);
} static void enqueue_task(struct rq *rq, struct task_struct *p, int flags)
{
update_rq_clock(rq);
sched_info_queued(rq, p);
p->sched_class->enqueue_task(rq, p, flags);
}
enqueue_task_fair()把新进程p放入cfs就绪队列rq中。
static void
enqueue_task_fair(struct rq *rq, struct task_struct *p, int flags)
{
struct cfs_rq *cfs_rq;
struct sched_entity *se = &p->se; for_each_sched_entity(se) {--------------------------对于没有定义CONFIG_FAIR_GROUP_SCHED的情况,只有一次结束for循环,即只有se一个调度实体。
if (se->on_rq)
break;
cfs_rq = cfs_rq_of(se);
enqueue_entity(cfs_rq, se, flags);---------------把调度实体se添加到cfs_rq就绪队列中。
if (cfs_rq_throttled(cfs_rq))
break;
cfs_rq->h_nr_running++; flags = ENQUEUE_WAKEUP;
} for_each_sched_entity(se) {
cfs_rq = cfs_rq_of(se);
cfs_rq->h_nr_running++; if (cfs_rq_throttled(cfs_rq))
break; update_cfs_shares(cfs_rq);
update_entity_load_avg(se, );----------------------------------------更新该调度实体的负载load_avg_contrib和就绪队列负载runnable_load_avg。
} if (!se) {
update_rq_runnable_avg(rq, rq->nr_running);
add_nr_running(rq, );
}
hrtick_update(rq);
} static void
enqueue_entity(struct cfs_rq *cfs_rq, struct sched_entity *se, int flags)
{
/*
* Update the normalized vruntime before updating min_vruntime
* through calling update_curr().
*/
if (!(flags & ENQUEUE_WAKEUP) || (flags & ENQUEUE_WAKING))
se->vruntime += cfs_rq->min_vruntime; /*
* Update run-time statistics of the 'current'.
*/update_curr(cfs_rq);-------------------------------------------------------更新当前进程的vruntime和该cfs就绪队列的min_vruntime。
enqueue_entity_load_avg(cfs_rq, se, flags & ENQUEUE_WAKEUP);---------------计算调度实体se的load_avg_contrib,然后添加到整个cfs就绪队列总平局负载cfs_rq->runnable_load_avg中。
account_entity_enqueue(cfs_rq, se);
update_cfs_shares(cfs_rq); if (flags & ENQUEUE_WAKEUP) {-----------------------------------------------处理刚被唤醒的进程。
place_entity(cfs_rq, se, );--------------------------------------------对唤醒进程有一定补偿,最多可以补偿一个调度周期的一般,即vruntime减去半个调度周期时间。
enqueue_sleeper(cfs_rq, se);
} update_stats_enqueue(cfs_rq, se);
check_spread(cfs_rq, se);
if (se != cfs_rq->curr)
__enqueue_entity(cfs_rq, se);-------------------------------------------把调度实体se加入到cfs就绪队列的红黑树中。
se->on_rq = ;--------------------------------------------------------------表示该调度实体已经在cfs就绪队列中。 if (cfs_rq->nr_running == ) {
list_add_leaf_cfs_rq(cfs_rq);
check_enqueue_throttle(cfs_rq);
}
}
check_preempt_curr()用于检查是否有新进程抢占当前进程。
void check_preempt_curr(struct rq *rq, struct task_struct *p, int flags)
{
const struct sched_class *class; if (p->sched_class == rq->curr->sched_class) {
rq->curr->sched_class->check_preempt_curr(rq, p, flags);
} else {
for_each_class(class) {
if (class == rq->curr->sched_class)
break;
if (class == p->sched_class) {
resched_curr(rq);
break;
}
}
} /*
* A queue event has occurred, and we're going to schedule. In
* this case, we can save a useless back to back clock update.
*/
if (task_on_rq_queued(rq->curr) && test_tsk_need_resched(rq->curr))
rq_clock_skip_update(rq, true);
} static void check_preempt_wakeup(struct rq *rq, struct task_struct *p, int wake_flags)
{
struct task_struct *curr = rq->curr;
struct sched_entity *se = &curr->se, *pse = &p->se;
struct cfs_rq *cfs_rq = task_cfs_rq(curr);
int scale = cfs_rq->nr_running >= sched_nr_latency;
int next_buddy_marked = ; if (unlikely(se == pse))
return; /*
* This is possible from callers such as attach_tasks(), in which we
* unconditionally check_prempt_curr() after an enqueue (which may have
* lead to a throttle). This both saves work and prevents false
* next-buddy nomination below.
*/
if (unlikely(throttled_hierarchy(cfs_rq_of(pse))))
return; if (sched_feat(NEXT_BUDDY) && scale && !(wake_flags & WF_FORK)) {
set_next_buddy(pse);
next_buddy_marked = ;
} /*
* We can come here with TIF_NEED_RESCHED already set from new task
* wake up path.
*
* Note: this also catches the edge-case of curr being in a throttled
* group (e.g. via set_curr_task), since update_curr() (in the
* enqueue of curr) will have resulted in resched being set. This
* prevents us from potentially nominating it as a false LAST_BUDDY
* below.
*/
if (test_tsk_need_resched(curr))
return; /* Idle tasks are by definition preempted by non-idle tasks. */
if (unlikely(curr->policy == SCHED_IDLE) &&
likely(p->policy != SCHED_IDLE))
goto preempt; /*
* Batch and idle tasks do not preempt non-idle tasks (their preemption
* is driven by the tick):
*/
if (unlikely(p->policy != SCHED_NORMAL) || !sched_feat(WAKEUP_PREEMPTION))
return; find_matching_se(&se, &pse);
update_curr(cfs_rq_of(se));
BUG_ON(!pse);
if (wakeup_preempt_entity(se, pse) == ) {
/*
* Bias pick_next to pick the sched entity that is
* triggering this preemption.
*/
if (!next_buddy_marked)
set_next_buddy(pse);
goto preempt;
} return; preempt:
resched_curr(rq);
/*
* Only set the backward buddy when the current task is still
* on the rq. This can happen when a wakeup gets interleaved
* with schedule on the ->pre_schedule() or idle_balance()
* point, either of which can * drop the rq lock.
*
* Also, during early boot the idle thread is in the fair class,
* for obvious reasons its a bad idea to schedule back to it.
*/
if (unlikely(!se->on_rq || curr == rq->idle))
return; if (sched_feat(LAST_BUDDY) && scale && entity_is_task(se))
set_last_buddy(se);
}
3. 进程调度
__schedule()是调度器的核心函数,其作用是让调度器选择和切换到一个合适进程运行。调度轨迹如下:
__schedule()
->pick_next_task()
->pick_next_task_fair()
->context_switch()
->switch_mm()
->cpu_v7_switch_mm()
->switch_to()
->__switch_to
3.1 进程调度时机
调度的时机分为如下3种:
1. 阻塞操作:互斥量(mutex)、信号量(semaphore)、等待队列(waitqueue)等。
2. 在中断返回前和系统调用返回用户空间时,去检查TIF_NEED_RESCHED标志位以判断是否需要调度。
3. 将要被唤醒的进程不会马上调用schedule()要求被调度,而是会被添加到cfs就绪队列中,并且设置TIF_NEED_RESCHED标志位。那么唤醒进程什么时候被调度呢?这要根据内核是否具有可抢占功能(CONFIG_PREEMPT=y)分两种情况。
3.1 如果内核可抢占,则:
- 如果唤醒动作发生在系统调用或者异常处理上下文中,在下一次调用preempt_enable()时会检查是否需要抢占调度。
- 如果唤醒动作发生在硬中断处理上下文中,硬件中断处理返回前夕(不管中断发生点在内核空间还是用户空间)会检查是否要抢占当前进程。
3.2 如果内核不可抢占,则:
- 当前进程调用cond_resched()时会检查是否要调度。
- 主动调度用schedule()。
- 系统调用或者异常处理返回用户空间时。
- 中断处理完成返回用户空间时(只有中断发生点在用户空间才会检查)。
3.2 preempt_schedule()
asmlinkage __visible void __sched notrace preempt_schedule(void)
{
/*
* If there is a non-zero preempt_count or interrupts are disabled,
* we do not want to preempt the current task. Just return..
*/
if (likely(!preemptible()))
return; preempt_schedule_common();
} static void __sched notrace preempt_schedule_common(void)
{
do {
__preempt_count_add(PREEMPT_ACTIVE);
__schedule();
__preempt_count_sub(PREEMPT_ACTIVE); /*
* Check again in case we missed a preemption opportunity
* between schedule and now.
*/
barrier();
} while (need_resched());
}
3.3 __schedule()
__schedule()函数调用pick_next_task()让进程调度器从就绪队列中选择一个最合适的进程next,然后context_switch()切换到next进程运行。
static void __sched __schedule(void)
{
struct task_struct *prev, *next;
unsigned long *switch_count;
struct rq *rq;
int cpu; preempt_disable();
cpu = smp_processor_id();
rq = cpu_rq(cpu);
rcu_note_context_switch();
prev = rq->curr; schedule_debug(prev); if (sched_feat(HRTICK))
hrtick_clear(rq); smp_mb__before_spinlock();
raw_spin_lock_irq(&rq->lock); rq->clock_skip_update <<= ; /* promote REQ to ACT */ switch_count = &prev->nivcsw;
if (prev->state && !(preempt_count() & PREEMPT_ACTIVE)) {--------------当前进程状态不处于TASK_RUNNING状态,
if (unlikely(signal_pending_state(prev->state, prev))) {
prev->state = TASK_RUNNING;
} else {
deactivate_task(rq, prev, DEQUEUE_SLEEP);
prev->on_rq = ; if (prev->flags & PF_WQ_WORKER) {
struct task_struct *to_wakeup; to_wakeup = wq_worker_sleeping(prev, cpu);
if (to_wakeup)
try_to_wake_up_local(to_wakeup);
}
}
switch_count = &prev->nvcsw;
} if (task_on_rq_queued(prev))
update_rq_clock(rq); next =pick_next_task(rq, prev);---------------------------------------调用pick_next_task_fair()从就绪队列rq上选择合适的进程返回给next。
clear_tsk_need_resched(prev);
clear_preempt_need_resched();
rq->clock_skip_update = ; if (likely(prev != next)) {--------------------------------------------如果待切入的进程next和待切出的进程next不等,那么调用context_switch()进行上下文切换。
rq->nr_switches++;
rq->curr = next;
++*switch_count; rq = context_switch(rq, prev, next); /* unlocks the rq */
cpu = cpu_of(rq);
} else
raw_spin_unlock_irq(&rq->lock); post_schedule(rq); sched_preempt_enable_no_resched();
}
下面重点分析选择待切入函数pick_next_task()和进行切换函数context_switch()两部分。
3.3.1 pick_next_task()
pick_next_task()是对调度类中pick_next_task()方法的包裹,这里主要对应cfs调度策略的pick_next_task_fair()。
/*
* Pick up the highest-prio task:
*/
static inline struct task_struct *
pick_next_task(struct rq *rq, struct task_struct *prev)
{
const struct sched_class *class = &fair_sched_class;
struct task_struct *p; /*
* Optimization: we know that if all tasks are in
* the fair class we can call that function directly:
*/
if (likely(prev->sched_class == class &&
rq->nr_running == rq->cfs.h_nr_running)) {------------------------如果当前进程prev的调度类是cfs,并且该CPU就绪队列中进程数量等于cfs就绪队列中进程数量。说明该CPU就绪队列中只有普通进程没有其它调度类进程。
p =fair_sched_class.pick_next_task(rq, prev);
if (unlikely(p == RETRY_TASK))
goto again; /* assumes fair_sched_class->next == idle_sched_class */
if (unlikely(!p))
p = idle_sched_class.pick_next_task(rq, prev); return p;
} again:
for_each_class(class) {--------------------------------------------------其它情况就需要遍历整个调度类,优先级为stop->deadline->realtime->cfs->idle。从这里也可以看出不同调度策略的优先级。
p = class->pick_next_task(rq, prev);
if (p) {
if (unlikely(p == RETRY_TASK))
goto again;
return p;
}
} BUG(); /* the idle class will always have a runnable task */
} static struct task_struct *
pick_next_task_fair(struct rq *rq, struct task_struct *prev)
{
struct cfs_rq *cfs_rq = &rq->cfs;
struct sched_entity *se;
struct task_struct *p;
int new_tasks; again:
#ifdef CONFIG_FAIR_GROUP_SCHED
...
#endif if (!cfs_rq->nr_running)--------------------------------如果cfs就绪队列上没有进程,那么选择idle进程。
goto idle; put_prev_task(rq, prev); do {
se =pick_next_entity(cfs_rq, NULL);----------------选择cfs就绪队列中的红黑树最左边进程。
set_next_entity(cfs_rq, se);
cfs_rq = group_cfs_rq(se);--------------------------如果定义CONFIG_FAIR_GROUP_SCHED,需要遍历cfs_rq->rq上的就绪队列。如果没定义,则返回NULL。
} while (cfs_rq); p = task_of(se); if (hrtick_enabled(rq))
hrtick_start_fair(rq, p); return p; idle:
new_tasks = idle_balance(rq);
/*
* Because idle_balance() releases (and re-acquires) rq->lock, it is
* possible for any higher priority task to appear. In that case we
* must re-start the pick_next_entity() loop.
*/
if (new_tasks < )
return RETRY_TASK; if (new_tasks > )
goto again; return NULL;
}
在没有定义CONFIG_FAIR_GROUP_SCHED的情况下,pick_next_entity()参数curr为NULL。表示pick_next_entity()优先获取cfs_rq->rb_leftmost结点。
set_next_entity()将cfs_rq->curr指向se,并且更行se的exec_start和prev_sum_exec_runtime。
static struct sched_entity *
pick_next_entity(struct cfs_rq *cfs_rq, struct sched_entity *curr)
{
struct sched_entity *left = __pick_first_entity(cfs_rq);
struct sched_entity *se; /*
* If curr is set we have to see if its left of the leftmost entity
* still in the tree, provided there was anything in the tree at all.
*/
if (!left || (curr && entity_before(curr, left)))-----------------如果left不存在,left指向curr;或者left存在,curr不为NULL且curr的vruntime小于left的,那么left指向curr。
left = curr; se = left; /* ideally we run the leftmost entity */---------------在curr为NULL情况下,se即cfs_rq的最左侧节点。
...
/*
* Prefer last buddy, try to return the CPU to a preempted task.
*/
if (cfs_rq->last && wakeup_preempt_entity(cfs_rq->last, left) < )----如果cfs_rq->last存在,且其vruntime小于left的。那么更新se为cfs_rq->last。
se = cfs_rq->last; /*
* Someone really wants this to run. If it's not unfair, run it.
*/
if (cfs_rq->next && wakeup_preempt_entity(cfs_rq->next, left) < )----类似于cfs_rq->next,如果cfs_rq->next小于left的vruntime,那么更新se为cfs_rq->next。
se = cfs_rq->next; clear_buddies(cfs_rq, se); return se;
} static void
set_next_entity(struct cfs_rq *cfs_rq, struct sched_entity *se)
{
/* 'current' is not kept within the tree. */
if (se->on_rq) {-----------------------------------------------------如果当前调度实体在就绪队列,则移除。
/*
* Any task has to be enqueued before it get to execute on
* a CPU. So account for the time it spent waiting on the
* runqueue.
*/
update_stats_wait_end(cfs_rq, se);
__dequeue_entity(cfs_rq, se);
} update_stats_curr_start(cfs_rq, se);
cfs_rq->curr = se;
#ifdef CONFIG_SCHEDSTATS
/*
* Track our maximum slice length, if the CPU's load is at
* least twice that of our own weight (i.e. dont track it
* when there are only lesser-weight tasks around):
*/
if (rq_of(cfs_rq)->load.weight >= *se->load.weight) {
se->statistics.slice_max = max(se->statistics.slice_max,
se->sum_exec_runtime - se->prev_sum_exec_runtime);
}
#endif
se->prev_sum_exec_runtime = se->sum_exec_runtime;
}
3.3.2 context_switch()
context_switch()共3个参数,其中rq表示进程切换所在的就绪队列,prev将要被换出的进程,next将要被换入执行的进程。
/*
* context_switch - switch to the new MM and the new thread's register state.
*/
static inline struct rq *
context_switch(struct rq *rq, struct task_struct *prev,
struct task_struct *next)
{
struct mm_struct *mm, *oldmm; prepare_task_switch(rq, prev, next);-----------和finish_task_switch()成对操作,其中next->on_cpu置1。 mm = next->mm;
oldmm = prev->active_mm;
/*
* For paravirt, this is coupled with an exit in switch_to to
* combine the page table reload and the switch backend into
* one hypercall.
*/
arch_start_context_switch(prev); if (!mm) {-------------------------------------对于内核线程来说是没有进程地址空间的
next->active_mm = oldmm;-------------------因为进程调度的需要,需要借用一个进程的地址空间,因此有了active_mm成员。为什么不用prev->mm呢?因为prev也可能是内核线程。
atomic_inc(&oldmm->mm_count);
enter_lazy_tlb(oldmm, next);
} elseswitch_mm(oldmm, mm, next);----------------对普通进程,需要调用switch_mm()函数做一些进程地址空间切换的处理。 if (!prev->mm) {-------------------------------对于prev是内核线程情况,prev->active_mm为NULL,rq->prev_mm记录prev->active_mm。
prev->active_mm = NULL;
rq->prev_mm = oldmm;
}
/*
* Since the runqueue lock will be released by the next
* task (which is an invalid locking op but in the case
* of the scheduler it's an obvious special-case), so we
* do an early lockdep release here:
*/
spin_release(&rq->lock.dep_map, , _THIS_IP_); context_tracking_task_switch(prev, next);
/* Here we just switch the register state and the stack. */switch_to(prev, next, prev);-------------------切换进程,从prev进程切换到next进程来运行。该函数完成时,CPU运行next进程,prev进程被调度出去,俗称“睡眠”。
barrier(); return finish_task_switch(prev);---------------进程切换后的清理工作,prev->on_cpu置0,递减old_mm->mm_count,由next处理prev进程残局。
}
switch_mm()和switch_to()都是体系结构密切相关函数。
switch_mm()把新进程页表基地址设置到页目录表基地址寄存器中。
switch_mm()首先把当前CPU设置到下一个进程的cpumask位图中,然后调用check_and_switch_context()来完成ARM体系结构相关的硬件设置,例如flush TLB。
/*
* This is the actual mm switch as far as the scheduler
* is concerned. No registers are touched. We avoid
* calling the CPU specific function when the mm hasn't
* actually changed.
*/
static inline void
switch_mm(struct mm_struct *prev, struct mm_struct *next,
struct task_struct *tsk)
{
#ifdef CONFIG_MMU
unsigned int cpu = smp_processor_id(); /*
* __sync_icache_dcache doesn't broadcast the I-cache invalidation,
* so check for possible thread migration and invalidate the I-cache
* if we're new to this CPU.
*/
if (cache_ops_need_broadcast() &&
!cpumask_empty(mm_cpumask(next)) &&
!cpumask_test_cpu(cpu, mm_cpumask(next)))
__flush_icache_all(); if (!cpumask_test_and_set_cpu(cpu, mm_cpumask(next)) || prev != next) {
check_and_switch_context(next, tsk);
if (cache_is_vivt())
cpumask_clear_cpu(cpu, mm_cpumask(prev));
}
#endif
}
switch_to()最终调用__switch_to()汇编函数。
__switch_to()包含三个参数,r0是移出进程(prev)的task_struct结构,r1是移出进程(task_thread_info(prev))的thread_info结构,r2是移入进程(task_thread_info(next))的thread_info结构。
这里把prev进程相关寄存器上下文保存到该进程的thread_info->cpu_context结构体中,然后再把next进程thread_info->cpu_context结构体中的值设置到物理CPU寄存器中,从而实现进程堆栈的切换。
#define switch_to(prev,next,last) \
do { \
last = __switch_to(prev,task_thread_info(prev), task_thread_info(next)); \
} while () /*
* Register switch for ARMv3 and ARMv4 processors
* r0 = previous task_struct, r1 = previous thread_info, r2 = next thread_info
* previous and next are guaranteed not to be the same.
*/
ENTRY(__switch_to)
UNWIND(.fnstart )
UNWIND(.cantunwind )
add ip, r1, #TI_CPU_SAVE
ARM( stmia ip!, {r4 - sl, fp, sp, lr} ) @ Store most regs on stack
THUMB( stmia ip!, {r4 - sl, fp} ) @ Store most regs on stack
THUMB( str sp, [ip], # )
THUMB( str lr, [ip], # )
ldr r4, [r2, #TI_TP_VALUE]
ldr r5, [r2, #TI_TP_VALUE + ]
#ifdef CONFIG_CPU_USE_DOMAINS
ldr r6, [r2, #TI_CPU_DOMAIN]
#endif
switch_tls r1, r4, r5, r3, r7
#if defined(CONFIG_CC_STACKPROTECTOR) && !defined(CONFIG_SMP)
ldr r7, [r2, #TI_TASK]
ldr r8, =__stack_chk_guard
ldr r7, [r7, #TSK_STACK_CANARY]
#endif
#ifdef CONFIG_CPU_USE_DOMAINS
mcr p15, , r6, c3, c0, @ Set domain register
#endif
mov r5, r0
add r4, r2, #TI_CPU_SAVE
ldr r0, =thread_notify_head
mov r1, #THREAD_NOTIFY_SWITCH
bl atomic_notifier_call_chain
#if defined(CONFIG_CC_STACKPROTECTOR) && !defined(CONFIG_SMP)
str r7, [r8]
#endif
THUMB( mov ip, r4 )
mov r0, r5
ARM( ldmia r4, {r4 - sl, fp, sp, pc} ) @ Load all regs saved previously
THUMB( ldmia ip!, {r4 - sl, fp} ) @ Load all regs saved previously
THUMB( ldr sp, [ip], # )
THUMB( ldr pc, [ip] )
UNWIND(.fnend )
ENDPROC(__switch_to)
3.4 调度实体sched_entity红黑树操作
cfs使用红黑树来管理调度实体,红黑树的键值为sched_entity->vruntime。
__enqueue_entity()用于将调度实体se键入到cfs_rq运行队列上,具体是加入到cfs_rq->tasks_timeline的红黑树上。
/*
* Enqueue an entity into the rb-tree:
*/
static void __enqueue_entity(struct cfs_rq *cfs_rq, struct sched_entity *se)
{
struct rb_node **link = &cfs_rq->tasks_timeline.rb_node;----------------------取当前cfs_rq->tasks_timeline树上的第一个节点,注意不一定是最左侧节点。
struct rb_node *parent = NULL;
struct sched_entity *entry;
int leftmost = ; /*
* Find the right place in the rbtree:
*/
while (*link) {---------------------------------------------------------------从第一个节点开始遍历当前cfs_rq红黑树,知道找到空的插入节点。
parent = *link;
entry = rb_entry(parent, struct sched_entity, run_node);------------------通过parent找到其对应的调度实体
/*
* We dont care about collisions. Nodes with
* the same key stay together.
*/
if (entity_before(se, entry)) {-------------------------------------------如果se->vruntime < entry->vruntime则条件成立,插入点指向entry对应的左节点。
link = &parent->rb_left;
} else {------------------------------------------------------------------否则插入点指向entry对应的右节点,则leftmost为0。
link = &parent->rb_right;
leftmost = ;
}
} /*
* Maintain a cache of leftmost tree entries (it is frequently
* used):
*/
if (leftmost)----------------------------------------------------------------如果新插入的节点为最左侧节点,那么需要改变cfs_rq->rb_leftmost。
cfs_rq->rb_leftmost = &se->run_node; rb_link_node(&se->run_node, parent, link);-----------------------------------将link指向se->run_node
rb_insert_color(&se->run_node, &cfs_rq->tasks_timeline);---------------------在将se->run_node插入后,进行平衡调整。
} static void __dequeue_entity(struct cfs_rq *cfs_rq, struct sched_entity *se)
{
if (cfs_rq->rb_leftmost == &se->run_node) {---------------------------------如果待删除的节点是cfs_rq->rb_leftmose,那么还需要更新cfs_rq->rb_leftmost,然后再删除。
struct rb_node *next_node; next_node = rb_next(&se->run_node);
cfs_rq->rb_leftmost = next_node;
} rb_erase(&se->run_node, &cfs_rq->tasks_timeline);---------------------------从cfs_rq->tasks_timeline删除节点se->run_node。
} struct sched_entity *__pick_first_entity(struct cfs_rq *cfs_rq)-----------------获取cfs_rq->rb_leftmost对应的调度实体。
{
struct rb_node *left = cfs_rq->rb_leftmost; if (!left)
return NULL; return rb_entry(left, struct sched_entity, run_node);
} static struct sched_entity *__pick_next_entity(struct sched_entity *se)----------获取当前调度实体右侧的调度实体。
{
struct rb_node *next = rb_next(&se->run_node); if (!next)
return NULL; return rb_entry(next, struct sched_entity, run_node);
} struct sched_entity *__pick_last_entity(struct cfs_rq *cfs_rq)------------------获取cfs_rq最右侧的调度实体。
{
struct rb_node *last = rb_last(&cfs_rq->tasks_timeline);--------------------rb_last在cfs_rq->tasks_timeline不停遍历右节点,直到最后一个。 if (!last)
return NULL; return rb_entry(last, struct sched_entity, run_node);
}
static inline int entity_before(struct sched_entity *a,
struct sched_entity *b)
{
return (s64)(a->vruntime - b->vruntime) < 0;----------------------------比较调度实体a->vruntime和b->vruntime,如果a before b返回true。
}
4. schedule tick
时钟分为周期性时钟和单次触发时钟,通过clockevents_register_device()进行注册。
广播和非广播时钟的区别在于设备的clock_event_device->cpumask设置。
clockevnets_register_device()
->tick_check_new_device()
->tick_setup_device()
->tick_setup_periodic()-----------------------------如果tick_device->mode定义为TICKDEV_MODE_PERIODIC,则注册为周期性时钟。
->tick_set_periodic_handler()
->tick_handle_periodic()------------------------周期性时钟
->tick_handle_periodic_broadcast()---------周期性广播时钟
->tick_setup_oneshot()-----------------------------如果tick_device->mode定义为TICKDEV_MODE_ONESHOT,则为单次触发时钟。
tick_set_periodic_handler()将struct clock_event_device的event_handler设置为tick_handle_periodic()。
上面是时钟的注册,时钟是由中断驱动的,在中断的处理函数中会调用到clock_event_device->event_handler()。
对于周期性时钟对应函数为tick_handle_periodic()-->tick_periodic()-->update_process_times()-->scheduler_tick()。
/*
* This function gets called by the timer code, with HZ frequency.
* We call it with interrupts disabled.
*/
void scheduler_tick(void)
{
int cpu = smp_processor_id();
struct rq *rq = cpu_rq(cpu);
struct task_struct *curr = rq->curr; sched_clock_tick(); raw_spin_lock(&rq->lock);
update_rq_clock(rq);--------------------------更新当前CPU就绪队列rq中的时钟计数clock和clock_task。
curr->sched_class->task_tick(rq, curr, );----对应调度类方法task_tick,cfs调度类对应task_tick_fair(),用于处理时钟tick到来时与调度器相关的事情。
update_cpu_load_active(rq);-------------------更新运行队列中的cpu_load[]
raw_spin_unlock(&rq->lock); perf_event_task_tick(); #ifdef CONFIG_SMP
rq->idle_balance = idle_cpu(cpu);
trigger_load_balance(rq);
#endif
rq_last_tick_reset(rq);
}
task_tick_fair()是cfs调度类task_tick()对应函数,首先调用entity_tick()检查是否需要调度,然后调用update_rq_runnable_avg更新该就绪队列的统计信息。
/*
* scheduler tick hitting a task of our scheduling class:
*/
static void task_tick_fair(struct rq *rq, struct task_struct *curr, int queued)
{
struct cfs_rq *cfs_rq;
struct sched_entity *se = &curr->se; for_each_sched_entity(se) {
cfs_rq = cfs_rq_of(se);-----------------------由sched_entity找到对应task_struct,进而找到所在的就绪队列,再找到cfs_rq。
entity_tick(cfs_rq, se, queued);--------------除了更新se和cfs_rq的统计信息之外,调用check_preempt_tick()检查是否需要调度。
} if (numabalancing_enabled)
task_tick_numa(rq, curr); update_rq_runnable_avg(rq, );
}
static void
entity_tick(struct cfs_rq *cfs_rq, struct sched_entity *curr, int queued)
{
/*
* Update run-time statistics of the 'current'.
*/update_curr(cfs_rq);------------------------------------更新当前进程的vruntime、exec_start等和就绪队列cfs_rq的min_vruntime等。 /*
* Ensure that runnable average is periodically updated.
*/update_entity_load_avg(curr, );------------------------更新curr调度实体的sched_avg参数load_avg_contrib等。
update_cfs_rq_blocked_load(cfs_rq, );
update_cfs_shares(cfs_rq);
...
if (cfs_rq->nr_running > )
check_preempt_tick(cfs_rq, curr);------------------如果当前就绪队列运行中进程数nr_running大于1,check_preempt_tick()进行检查当前进程是否需要让出CPU。
}
/*
* Preempt the current task with a newly woken task if needed:
*/
static void
check_preempt_tick(struct cfs_rq *cfs_rq, struct sched_entity *curr)
{
unsigned long ideal_runtime, delta_exec;
struct sched_entity *se;
s64 delta; ideal_runtime =sched_slice(cfs_rq, curr);----------------------------该进程根据权重在一个调度周期里分到的实际运行时间,和sched_vslice()得到的虚拟运行时间区别。
delta_exec = curr->sum_exec_runtime - curr->prev_sum_exec_runtime;----delta_exec是该进程已经运行的实际时间
if (delta_exec > ideal_runtime) {-------------------------------------如果实际运行时间超过了理论分配运行时间,那么该进程需要被调度出去,设置该进程thread_info中TIF_NEED_RESCHED标志位。
resched_curr(rq_of(cfs_rq));
/*
* The current task ran long enough, ensure it doesn't get
* re-elected due to buddy favours.
*/
clear_buddies(cfs_rq, curr);
return;
}
if (delta_exec < sysctl_sched_min_granularity)------------------------如果进程实际运行时间小于sysctl_sched_min_granularity(0.75ms),那么同样不需要调度。
return; se = __pick_first_entity(cfs_rq);-------------------------------------选择当前cfs_rq就绪队列最左侧调度实体。
delta = curr->vruntime - se->vruntime; if (delta < )--------------------------------------------------------如果当前curr->vruntime小于最左侧调度实体vruntime,同样不需要调度。
return; if (delta > ideal_runtime)--------------------------------------------这里为什么要这么比?delta是虚拟事件差值,ideal_runtime是实际时间差值。
resched_curr(rq_of(cfs_rq));
}
5. 组调度
CFS调度器的调度粒度是进程,在某些场景下希望调度粒度是组。
组与组之间的关系是公平的,组内的调度实体又是公平的。组调度就是解决这方面的应用需求。
CFS调度器定义一个数据结构来抽象组调度struct task_group。
/* task group related information */
struct task_group {
struct cgroup_subsys_state css; #ifdef CONFIG_FAIR_GROUP_SCHED
/* schedulable entities of this group on each cpu */
struct sched_entity **se;
/* runqueue "owned" by this group on each cpu */
struct cfs_rq **cfs_rq;
unsigned long shares; #ifdef CONFIG_SMP
atomic_long_t load_avg;
atomic_t runnable_avg;
#endif
#endif #ifdef CONFIG_RT_GROUP_SCHED
struct sched_rt_entity **rt_se;
struct rt_rq **rt_rq; struct rt_bandwidth rt_bandwidth;
#endif struct rcu_head rcu;
struct list_head list; struct task_group *parent;
struct list_head siblings;
struct list_head children; #ifdef CONFIG_SCHED_AUTOGROUP
struct autogroup *autogroup;
#endif struct cfs_bandwidth cfs_bandwidth;
}
5.1 创建组调度
组调度属于cgroup架构中的cpu子系统,在系统配置时需要打开CONFIG_CGROUP_SCHED和CONFIG_FAIR_GROUP_SCHED。
创建一个组调度的接口是sched_create_group()。
/* allocate runqueue etc for a new task group */
struct task_group *sched_create_group(struct task_group *parent)-----------parent指上一级的组调度节点,系统中有一个组调度的根root_task_group。
{
struct task_group *tg; tg = kzalloc(sizeof(*tg), GFP_KERNEL);---------------------------------分配task_group数据结构
if (!tg)
return ERR_PTR(-ENOMEM); if (!alloc_fair_sched_group(tg, parent))-------------------------------创建cfs调度器需要的组调度数据结构
goto err; if (!alloc_rt_sched_group(tg, parent))---------------------------------创建rt调度器需要的组调度数据结构
goto err; return tg; err:
free_sched_group(tg);
return ERR_PTR(-ENOMEM);
}
alloc_fair_sched_group()创建cfs调度器需要的组调度数据结构。
int alloc_fair_sched_group(struct task_group *tg, struct task_group *parent)
{
struct cfs_rq *cfs_rq;
struct sched_entity *se;
int i; tg->cfs_rq = kzalloc(sizeof(cfs_rq) * nr_cpu_ids, GFP_KERNEL);--分配NR_CPUS个cfs_rq数据结构,存放到指针数组中,这里数据结构不是struct cfs_rq。
if (!tg->cfs_rq)
goto err;
tg->se = kzalloc(sizeof(se) * nr_cpu_ids, GFP_KERNEL);----------分配NR_CPUS个se数据结构,注意这里不是struct sched_entity。
if (!tg->se)
goto err; tg->shares = NICE_0_LOAD;---------------------------------------调度组的权重初始化为NICE值为0的权重。 init_cfs_bandwidth(tg_cfs_bandwidth(tg)); for_each_possible_cpu(i) {--------------------------------------遍历系统中所有possible CPU,为每个CPU分配一个struct cfs_rq调度队列和struct sched_entity调度实体。
cfs_rq = kzalloc_node(sizeof(struct cfs_rq),----------------之前分配的是指针数组,这里为每个CPU分配struct cfs_rq和struct sched_entity数据结构。
GFP_KERNEL, cpu_to_node(i));
if (!cfs_rq)
goto err; se = kzalloc_node(sizeof(struct sched_entity),
GFP_KERNEL, cpu_to_node(i));
if (!se)
goto err_free_rq; init_cfs_rq(cfs_rq);----------------------------------------初始化cfs_rq就绪队列中的tasks_timeline和min_vruntime等信息。
init_tg_cfs_entry(tg, cfs_rq, se, i, parent->se[i]);--------构建组调度结构的关键函数。
} return ; err_free_rq:
kfree(cfs_rq);
err:
return ;
}
init_cfs_rq()初始化cfs_rq的tasks_timeline红黑树、min_vruntime。
init_tg_cfs_entry()初始化构建组调度结构的关键函数,,将rg和cfs_rq关联,。
void init_cfs_rq(struct cfs_rq *cfs_rq)
{
cfs_rq->tasks_timeline = RB_ROOT;
cfs_rq->min_vruntime = (u64)(-(1LL << ));
#ifndef CONFIG_64BIT
cfs_rq->min_vruntime_copy = cfs_rq->min_vruntime;
#endif
#ifdef CONFIG_SMP
atomic64_set(&cfs_rq->decay_counter, );
atomic_long_set(&cfs_rq->removed_load, );
#endif
} void init_tg_cfs_entry(struct task_group *tg, struct cfs_rq *cfs_rq,
struct sched_entity *se, int cpu,
struct sched_entity *parent)
{
struct rq *rq = cpu_rq(cpu); cfs_rq->tg = tg;
cfs_rq->rq = rq;
init_cfs_rq_runtime(cfs_rq); tg->cfs_rq[cpu] = cfs_rq;-----------------------------将alloc_fair_sched_group()分配的指针数组和对应的数据结构关联上。
tg->se[cpu] = se; /* se could be NULL for root_task_group */
if (!se)
return; if (!parent) {
se->cfs_rq = &rq->cfs;
se->depth = ;
} else {
se->cfs_rq = parent->my_q;
se->depth = parent->depth + ;
} se->my_q = cfs_rq;------------------------------------针对组调度中实体才有的my_q。
/* guarantee group entities always have weight */
update_load_set(&se->load, NICE_0_LOAD);
se->parent = parent;
}
5.1.1 双核task_group、cfs_rq、sched_entity、task_struct关系图
5.2 将进程加入组调度
通过调用cpu_cgrp_subsys的接口函数cpu_cgroup_attach()将今晨加入到组调度中。
struct cgroup_subsys cpu_cgrp_subsys = {
...
.attach =cpu_cgroup_attach,
.exit = cpu_cgroup_exit,
.legacy_cftypes = cpu_files,
.early_init = ,
};
static void cpu_cgroup_attach(struct cgroup_subsys_state *css,
struct cgroup_taskset *tset)
{
struct task_struct *task;
cgroup_taskset_for_each(task, tset)----------------遍历tset包含的进程链表。
sched_move_task(task);-------------------------将task进程迁移到组调度中。
}
void sched_move_task(struct task_struct *tsk)
{
struct task_group *tg;
int queued, running;
unsigned long flags;
struct rq *rq;
rq = task_rq_lock(tsk, &flags);
running = task_current(rq, tsk);--------------------------判断进程tsk是否正在运行
queued = task_on_rq_queued(tsk);--------------------------判断进程tsk是否在就绪队列里,tsk->on_rq等于TASK_ON_RQ_QUEUED表示该进程在就绪队列中。
if (queued)
dequeue_task(rq, tsk, );-----------------------------如果进程在就绪队列中,那么要让该进程暂时先退出就绪队列。
if (unlikely(running))------------------------------------如果该进程在在运行中,刚才已经调用dequeue_task()把进程退出就绪队列,现在只能继续加回到就绪队列中。
put_prev_task(rq, tsk);
/*
* All callers are synchronized by task_rq_lock(); we do not use RCU
* which is pointless here. Thus, we pass "true" to task_css_check()
* to prevent lockdep warnings.
*/
tg = container_of(task_css_check(tsk, cpu_cgrp_id, true),
struct task_group, css);
tg = autogroup_task_group(tsk, tg);
tsk->sched_task_group = tg;
#ifdef CONFIG_FAIR_GROUP_SCHED
if (tsk->sched_class->task_move_group)
tsk->sched_class->task_move_group(tsk, queued);
else
#endifset_task_rq(tsk, task_cpu(tsk));---------------------将tsk对应的调度实体的cfs_rq、parent和当前CPU对应的cfs_rq、se关联起来。
if (unlikely(running))
tsk->sched_class->set_curr_task(rq);
if (queued)
enqueue_task(rq, tsk, );
task_rq_unlock(rq, tsk, &flags);
}
static void task_move_group_fair(struct task_struct *p, int queued)
{
struct sched_entity *se = &p->se;
struct cfs_rq *cfs_rq;
if (!queued && (!se->sum_exec_runtime || p->state == TASK_WAKING))
queued = ;
if (!queued)
se->vruntime -= cfs_rq_of(se)->min_vruntime;
set_task_rq(p, task_cpu(p));
se->depth = se->parent ? se->parent->depth + : ;
if (!queued) {
cfs_rq = cfs_rq_of(se);
se->vruntime += cfs_rq->min_vruntime;
#ifdef CONFIG_SMP
se->avg.decay_count = atomic64_read(&cfs_rq->decay_counter);
cfs_rq->blocked_load_avg += se->avg.load_avg_contrib;
#endif
}
}
static inline void set_task_rq(struct task_struct *p, unsigned int cpu)
{
#if defined(CONFIG_FAIR_GROUP_SCHED) || defined(CONFIG_RT_GROUP_SCHED)
struct task_group *tg = task_group(p);----------获取当前进程对应的task_group。
#endif
#ifdef CONFIG_FAIR_GROUP_SCHED
p->se.cfs_rq = tg->cfs_rq[cpu];-----------------设置调度实体的cfs_rq和parent。
p->se.parent = tg->se[cpu];
#endif...
}
static void enqueue_task(struct rq *rq, struct task_struct *p, int flags)
{
update_rq_clock(rq);
sched_info_queued(rq, p);
p->sched_class->enqueue_task(rq, p, flags);
}
static void
enqueue_task_fair(struct rq *rq, struct task_struct *p, int flags)
{
struct cfs_rq *cfs_rq;
struct sched_entity *se = &p->se;
for_each_sched_entity(se) {------------------------------在打开CONFIG_FAIR_GROUP_SCHED之后,需要遍历进程调度实体和它的上一级调度实体。第一次遍历是p->se,第二滴遍历是对应组调度实体tg->se[]。
if (se->on_rq)
break;
cfs_rq = cfs_rq_of(se);
enqueue_entity(cfs_rq, se, flags);
/*
* end evaluation on encountering a throttled cfs_rq
*
* note: in the case of encountering a throttled cfs_rq we will
* post the final h_nr_running increment below.
*/
if (cfs_rq_throttled(cfs_rq))
break;
cfs_rq->h_nr_running++;
flags = ENQUEUE_WAKEUP;
}
for_each_sched_entity(se) {
cfs_rq = cfs_rq_of(se);
cfs_rq->h_nr_running++;
if (cfs_rq_throttled(cfs_rq))
break;
update_cfs_shares(cfs_rq);
update_entity_load_avg(se, );
}
if (!se) {
update_rq_runnable_avg(rq, rq->nr_running);
add_nr_running(rq, );
}
hrtick_update(rq);
}
static void set_curr_task_fair(struct rq *rq)
{
struct sched_entity *se = &rq->curr->se;
for_each_sched_entity(se) {
struct cfs_rq *cfs_rq = cfs_rq_of(se);
set_next_entity(cfs_rq, se);
/* ensure bandwidth has been allocated on our new cfs_rq */
account_cfs_rq_runtime(cfs_rq, );
}
}
组调度基本策略如下:
- 在创建组调度tg时,tg为每个CPU同时创建组调度内部使用的cfs_rq就绪队列。
- 组调度作为一个调度实体加入到系统的cfs就绪队列rq->cfs_rq中。
- 进程加入到一个组中后,就脱离了系统的cfs就绪队列,并且加入到组调度的cfs就绪队列tg->cfs_rq[]中。
- 在选择下一个进程时,从系统的cfs就绪队列开始,如果选中的调度实体是组调度tg,那么还需要继续遍历tg中的就绪队里,从中选择一个进程来运行。
5.3 组调度相关实验
6. PELT算法改进
PELT(Per-Entity Load Tracking)算法中有一个重要的变量runnable_load_avg,用于描述就绪队列基于可运行状态的总衰减累加时间(runnable time)和权重计算出来的平均负载。
在Linux 4.0中,一次只更新一个调度实体的负载,而没有更新cfs_rq所有调度实体的负载变化情况。
Linux 4.3做出了优化,在每次更新平均负载时会更新整个cfs_rq的平均负载。
struct cfs_rq中增加了struct sched_avg,并且struct sched_avg也做出了改变。
原来load_avg_contrib变成了load_avg,它是计算调度实体基于可运行时间的平均负载,并且考虑CPU频率因素。
util_avg是计算调度实体基于执行时间内的平均负载。对于就绪队列来说,这两个成员包括运行时间和阻塞时间。
struct sched_avg {
/*
* These sums represent an infinite geometric series and so are bound
* above by 1024/(1-y). Thus we only need a u32 to store them for all
* choices of y < 1-2^(-32)*1024.
*/
u32 runnable_avg_sum, runnable_avg_period;
u64 last_runnable_update;
s64 decay_count;
unsigned long load_avg_contrib;
};
/*
* The load_avg/util_avg accumulates an infinite geometric series.
* 1) load_avg factors the amount of time that a sched_entity is
* runnable on a rq into its weight. For cfs_rq, it is the aggregated
* such weights of all runnable and blocked sched_entities.
* 2) util_avg factors frequency scaling into the amount of time
* that a sched_entity is running on a CPU, in the range [0..SCHED_LOAD_SCALE].
* For cfs_rq, it is the aggregated such times of all runnable and
* blocked sched_entities.
* The 64 bit load_sum can:
* 1) for cfs_rq, afford 4353082796 (=2^64/47742/88761) entities with
* the highest weight (=88761) always runnable, we should not overflow
* 2) for entity, support any load.weight always runnable
*/
struct sched_avg {
u64 last_update_time, load_sum;
u32 util_sum, period_contrib;
unsigned long load_avg, util_avg;
};
7. 小结
Linux进程管理 (2)CFS调度器的更多相关文章
- Linux内核——进程管理之CFS调度器(基于版本4.x)
<奔跑吧linux内核>3.2笔记,不足之处还望大家批评指正 建议阅读博文https://www.cnblogs.com/openix/p/3262217.html理解linux cfs调 ...
- Linux进程管理 (7)实时调度
关键词:RT.preempt_count.RT patch. 除了CFS调度器之外,还包括重要的实时调度器,有两种RR和FIFO调度策略.本章只是一个简单的介绍. 更详细的介绍参考<Linux进 ...
- Linux进程管理 (9)实时调度类分析,以及FIFO和RR对比实验
关键词:rt_sched_class.SCHED_FIFO.SCHED_RR.sched_setscheduler().sched_setaffinity().RR_TIMESLICE. 本文主要关注 ...
- Linux进程管理专题
Linux进程管理 (1)进程的诞生介绍了如何表示进程?进程的生命周期.进程的创建等等? Linux支持多种调度器(deadline/realtime/cfs/idle),其中CFS调度器最常见.Li ...
- Linux进程管理 (1)进程的诞生
专题:Linux进程管理专题 目录: Linux进程管理 (1)进程的诞生 Linux进程管理 (2)CFS调度器 Linux进程管理 (3)SMP负载均衡 Linux进程管理 (4)HMP调度器 L ...
- Linux进程管理之task_struct结构
转载:http://blog.csdn.net/npy_lp/article/details/7335187 内核源码:linux-2.6.38.8.tar.bz2 目标平台:ARM体系结构 进程是处 ...
- Linux进程管理之task_struct结构体
进程是处于执行期的程序以及它所管理的资源(如打开的文件.挂起的信号.进程状态.地址空间等等)的总称.注意,程序并不是进程,实际上两个或多个进程不仅有可能执行同一程序,而且还有可能共享地址空间等资源. ...
- CFS调度器(1)-基本原理
首先需要思考的问题是:什么是调度器(scheduler)?调度器的作用是什么?调度器是一个操作系统的核心部分.可以比作是CPU时间的管理员.调度器主要负责选择某些就绪的进程来执行.不同的调度器根据不同 ...
- Linux进程管理与调度-之-目录导航【转】
转自:http://blog.csdn.net/gatieme/article/details/51456569 版权声明:本文为博主原创文章 && 转载请著名出处 @ http:// ...
随机推荐
- Duplicate entry '0' for key 'PRIMARY'
一般使用ORM时,提交新增实体时, mysql会出现此错误:Duplicate entry '0' for key 'PRIMARY' 原因是插入语句,未提供主键的值,且主键是非自增长的. 解决办法是 ...
- Android为TV端助力 doc里面adb连接出现问题的解决方法
第一保证连接的两边都是有网的 第二 就是网上常说的1.adb kill-server 2.adb start-server 3.adb remount 但是在运行adb remount有可能会提示 ...
- 我喜欢 Google Flutter
在 Google I/O ’17 上,Google 向我们介绍了 Flutter —— 一款新的用于创建移动应用的开源库. 正如你所想的那样,Flutter 是能够帮助创建拥有漂亮 UI 界面的跨平台 ...
- (网页)jQuery判断checkbox是否选中的方法
if($('#checkbox-id').is(':checked')) { // do something} if ($('#checkbox-id').attr('checked')) { ...
- Linux Xshell连接Linux服务器时报错Socket error Event: 32 Error: 10053
问题描述 在用Xshell连接Linux服务器时,出现错误提示"Socket error Event: 32 Error: 10053. Connection closing...Socke ...
- Scala类型限定
package big.data.analyse.scala /** * 类型限定 * Created by zhen on 2018/12/9. */ object Lxxd { def main( ...
- MHA快速搭建
很早之前写过MHA的文章,但是常常在技术群看到有同学问MHA搭建的问题,不是权限问题就是配置问题,我在这里就再次一写下配置过程以及快速的搭建.如果想知道更多的细节与原理,请参考:MySQL高可用架构之 ...
- [20180823]IMU与db link.txt
[20180823]IMU与db link.txt --//当使用db link查看远程表时,实际上会产生小小的日志.--//当时如果与IMU结合在一起,可以导致IMU的失效. 1.环境:SCOTT@ ...
- [转]JIRA 7.2.6与Confluence 6.0.3的安装与配置之MS SQL Server版
相关软件版本信息 说明:下方软件可以点击链接,通过百度云盘进行下载. 操作系统:Windows 10(密码:foht)或者Windows Server 2012(密码:lsad): 数据库:SQL S ...
- HTTP1.0 、1.1
网上有很多资料说明这个,但都很长的,觉得东西太多也记不住,就记点东西,权当笔记. HTTP 超文本传输协议(HTTP,HyperText Transfer Protocol)是互联网上应用最为广泛的一 ...