Ros学习——Python发布器publisher和订阅器subscriber
1.编写发布器
- 初始化 ROS 系统
在 ROS 网络内广播我们将要在 chatter 话题上发布 std_msgs/String 类型的消息
- 以每秒 10 次的频率在 chatter 上发布消息
在 beginner_tutorials package 里创建 script/talker.py 文件:
#!/usr/bin/env python
# license removed for brevity
import rospy
from std_msgs.msg import String def talker():
pub = rospy.Publisher('chatter', String, queue_size=10)
rospy.init_node('talker', anonymous=True)
rate = rospy.Rate(10) # 10hz
while not rospy.is_shutdown():
hello_str = "hello world %s" % rospy.get_time()
rospy.loginfo(hello_str)
pub.publish(hello_str)
rate.sleep() if __name__ == '__main__':
try:
talker()
except rospy.ROSInterruptException:
pass
赋予文件执行权限:
$ chmod +x listener.py
2.编写订阅器
- 初始化ROS系统
订阅 chatter 话题
- 进入自循环,等待消息的到达
当消息到达,调用 chatterCallback() 函数
在 beginner_tutorials 目录下创建 script/listener.py 文件:
#!/usr/bin/env python
import rospy
from std_msgs.msg import String def callback(data):
rospy.loginfo(rospy.get_caller_id() + "I heard %s", data.data) def listener(): # In ROS, nodes are uniquely named. If two nodes with the same
# node are launched, the previous one is kicked off. The
# anonymous=True flag means that rospy will choose a unique
# name for our 'listener' node so that multiple listeners can
# run simultaneously.
rospy.init_node('listener', anonymous=True) rospy.Subscriber("chatter", String, callback) # spin() simply keeps python from exiting until this node is stopped
rospy.spin() if __name__ == '__main__':
listener()
赋予文件执行权限:
$ chmod +x listener.py
3.编译
- 在catkin_ws目录下运行 catkin_make
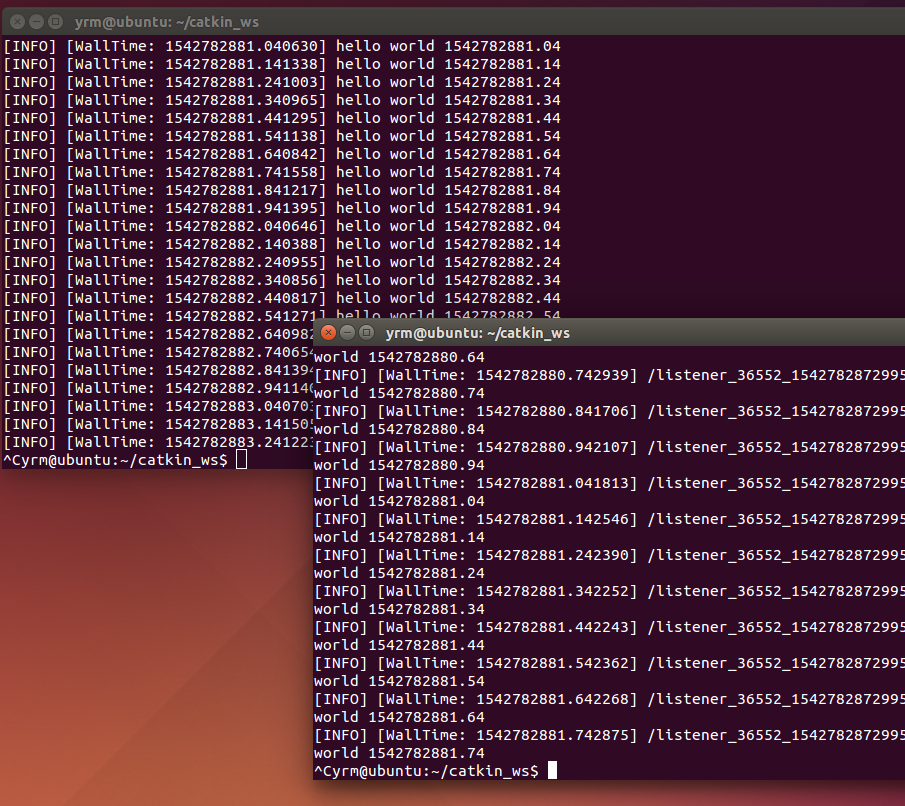
4.测试结果:
Ros学习——Python发布器publisher和订阅器subscriber的更多相关文章
- Ros学习——C++发布器publisher和订阅器subscriber
1.编写发布器 初始化 ROS 系统 在 ROS 网络内广播我们将要在 chatter 话题上发布 std_msgs/String 类型的消息 以每秒 10 次的频率在 chatter 上发布消息 在 ...
- ROS学习笔记10-写一个简单的订阅者和发布者(C++版本)
本文档来源于:http://wiki.ros.org/ROS/Tutorials/WritingPublisherSubscriber%28c%2B%2B%29 写发布者节点如前所述,节点是连接到RO ...
- ROS学习(七)—— 理解ROS Topic
一.准备工作 1.打开roscore roscore 2.turtlesim 打开一个turtulesim节点 rosrun turtlesim turtlesim_node 3.turtle key ...
- ROS学习(十二)—— 编写简单的消息发布器和订阅器(C++)
一.创建发布器节点 1 节点功能: 不断的在ROS网络中广播消息 2 创建节点 (1)打开工作空间目录 cd ~/catkin_ws/src/beginner_tutorials 创建一个发布器节点( ...
- ROS 消息发布器和订阅器Publisher, Subscriber
博客参考:https://www.2cto.com/kf/201705/639776.html 1.编写发布器节点节点(Node) 是指 ROS 网络中可执行文件.接下来,将会创建一个发布器节点(“t ...
- SLAM+语音机器人DIY系列:(二)ROS入门——5.编写简单的消息发布器和订阅器
摘要 ROS机器人操作系统在机器人应用领域很流行,依托代码开源和模块间协作等特性,给机器人开发者带来了很大的方便.我们的机器人“miiboo”中的大部分程序也采用ROS进行开发,所以本文就重点对ROS ...
- ROS:消息发布器和订阅器(c++)
学习资料主要源自http://wiki.ros.org/ROS/Tutorials/WritingPublisherSubscriber%28c%2B%2B%29 $ roscd beginner_t ...
- [转]RoboWare Studio的使用和发布器/订阅器的编写与测试
原文地址:https://blog.csdn.net/han_l/article/details/77772352,转载主要方便随时查阅,如有版权要求,请及时联系. 开始ROS学习之前,先按照官网教程 ...
- ROS笔记——创建简单的主题发布节点和主题订阅节点
在安装好ROS后,接着学习如何创建节点和节点之间的通信方式,以一个简单的主题发布节点和主题订阅节点说明. 节点是连接ROS网络等可执行文件,是实现某些功能的软件包,也是一个主要计算执行的进程. 一.创 ...
随机推荐
- Hello Swift
第一个Swift作品,HelloSwift,呵呵.你会把原来的项目用swift改写吗?
- Mysql时间戳函数和ip转换函数
Mysql中对于unix时间戳的转换还是挺方便的, 1.转换为时间戳 select unix_timestamp('2013-07-15 10-06-07') 如果参数为空,则为当前时间 2.转换为时 ...
- mac下编译安装grafana 4.2.0
go语言在开发效率和运行效率中的优势让很多人青睐,所以有倾向打算转向go语言的开发. 下面介绍在Mac OS X中golang的开发环境配置. 1.安装brew brew是一个mac下的由ruby开发 ...
- Ubuntu下使用tmux实现分屏,以及tmux快捷键
最近用到了终端的复用,使用了tmux,写一下自己的使用和一些快捷键. tmux是指通过一个终端登录远程主机并运行后,在其中可以开启多个控制台的终端复用软件. 来个效果图: 截图我使用的命令是 gno ...
- AngularJS-webapp($q)
$q延迟加载: 当一个数据需要请求多次,后面一个数据需要前面请求的数据时,我们就可以通过延迟加载进行数据传递 如下代码: 首先:我们需要得到职位信息: { "id": " ...
- innoDB 下主键的思考
主键 表中每一行都应该有可以唯一标识自己的一列(或一组列). 一个顾客可以使用顾客编号列,而订单可以使用订单ID,雇员可以使用雇员ID 或 雇员社会保险号. 主键(primary key) 一列(或一 ...
- MeshBaker
https://blog.csdn.net/z9895512/article/details/52297387 详细教程直接贴一个其他人写的教程,这个人写得很详细,插件的各种功能几乎都有教程: htt ...
- ftp上传下载 java FTPClient (zhuan)
项目需要,网上搜了搜,很多,但问题也不少,估计转来转去,少了不少东西,而且也情况也不太一样.没办法,只能自己去写一个. 一, 安装sserv-u ftp服务器 版本10.1.0.1 我所设服务器 ...
- 如何上Chrome谷歌商店
将以下代码复制到本地Hosts中即可. #Google Services START64.233.162.83 0.docs.google.com64.233.162.83 0.drive.googl ...
- jenkins 参数化构建,获取git分支
def heads= ("git ls-remote -h git@gitlab.com:*.git").execute()def headlist=heads.text.read ...