配置 jaco机械臂 ros环境
---恢复内容开始---
终于有机械臂了,
首先先下载包
cd ~/catkin_ws/src
git clone https://github.com/Kinovarobotics/kinova-ros.git kinova-ros
cd ~/catkin
catkin_make
To access the arm via usb copy the udev rule file 10-kinova-arm.rules from
~/catkin_ws/src/kinova-ros/kinova_driver/udev to /etc/udev/rules.d/:
绑定usb端口
sudo cp ~/catkin_ws/src/kinova-ros/kinova_driver/udev/-kinova-arm.rules /etc/udev/rules.d/
我的直接默认参数启动kinova_robot.launch文件即可
<launch> <arg name="use_urdf" default="true"/>
<arg name="kinova_robotType" default="j2n6a300" /> <node name="$(arg kinova_robotType)_driver" pkg="kinova_driver" type="kinova_arm_driver" output="screen" cwd="node" args="$(arg kinova_robotType)">
<!-- Set this parameter to use a specific arm on your system -->
<!-- <param name="serial_number" value="PJ00000001030703130" /> -->
</node> <group unless="$(arg use_urdf)">
<node name="$(arg kinova_robotType)_tf_updater" pkg="kinova_driver" type="kinova_tf_updater" output="screen" cwd="node" args="$(arg kinova_robotType)">
<remap from="/$(arg kinova_robotType)_tf_updater/in/joint_angles" to="/$(arg kinova_robotType)_driver/out/joint_angles"/>
</node>
</group> <group if="$(arg use_urdf)">
<param name="robot_description" command="$(find xacro)/xacro.py '$(find kinova_description)/urdf/$(arg kinova_robotType)_standalone.xacro'" />
<node name="$(arg kinova_robotType)_state_publisher"
pkg="robot_state_publisher"
type="robot_state_publisher">
<remap from="joint_states" to="/$(arg kinova_robotType)_driver/out/joint_state"/>
</node>
</group> </launch>
kinova为了支持不同的产品,利用8个字节的字符串kinova_robotType来配置参数,参数范围[{j|m|r|c}{1|2}{s|n}{4|6|7}{s|a}{2|3}{0}{0}]
{j|m|r|c} 代表产品 jaco, mico, roco and customized
{1|2} 版本号
{s|n} wrist type 手腕类型
{4|6|7} 几自由度的机械臂
{s|a} 机器人模型
{2|3} 手指的个数
最后两位还没有被定义
默认参数j2n6a300 是jaco v2 6DOF assistive 3 fingers机械臂
根据自己的进行相应修改
然后运行
roslaunch kinova_bringup kinova_robot.launch
rosrun rviz rviz
在rviz中添加机器人模型选项

然后在demo文件夹下有相应的测试程序
fingers_action_client.py joints_action_client.py pose_action_client.py
控制6个关节
rosrun kinova_demo joints_action_client.py -v -r j2n6a300 degree --
-v 代表输出显示所有关节的当前角度值
-r代表修改关节位置使用相对原来位置加或减去对应值,一定要加上此参数
j2n6a300 前面说的类型号
后边为6个关节<Angle_J1> <Angle_J2> <Angle_J3> <Angle_J4> <Angle_J5> <Angle_J6>

六个关节的角度信息被发布到这个话题上:
/'${kinova_robotType}_driver'/out/joint_angles

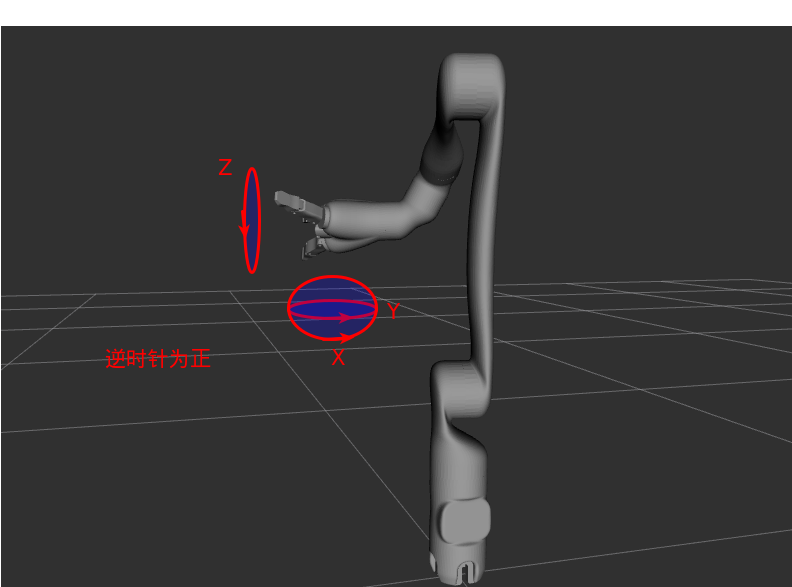
直接修改机械臂手的空间位置
rosrun kinova_demo pose_action_client.py -v -r j2n6a300 mdeg -- 0.01
mdeg {mq | mdeg | mrad} mq代表米&四元数 mdeg米&角度 米&弧度
<pos x> <pos y> <pos z> 三轴角度<Angle_x> <Angle_y> <Angle_z>或四元数<ori x> <ori y> <ori z> <ori w>

当前笛卡尔坐标被发布到这个话题
/'${kinova_robotType}_driver'/out/tool_pose

末端力旋量也就是手爪的力
/'${kinova_robotType}_driver'/out/tool_wrench

机械臂也是靠力的数据来保护它不硬撞上东西

控制机械手
rosrun kinova_demo fingers_action_client.py -v j2n6a300 percent

percent {turn | mm | percent}三种控制方式,turn [0, 6800]从张开到闭合 mm手指从张开移动距离[0,9.45] percent[0,100]闭合百分比
这几种控制方式都是控制手指的闭合度
手位置信息被发布到这个话题/'${kinova_robotType}_driver'/out/finger_position
机械臂也能通过控制每个关节的角速度,或坐标系的线速度来控制 就不一一写了
另外 kinova公司提供了API接口,可使用其库函数
库在kinova-ros/kinova_driver/lib/文件夹下
配置 jaco机械臂 ros环境的更多相关文章
- 通过actionlib控制jaco机械臂
为了安全,先写一个简单控制三个手指的程序: 根据驱动包内kinova_fingers_action.cpp服务器写客户端程序 #include <ros/ros.h> #include & ...
- ROS机械臂 Movelt 学习笔记3 | kinect360相机(v1)相关配置
目标是做一个机械臂视觉抓取的demo,在基地里翻箱倒柜,没有找到学长所说的 d435,倒是找到了一个老古董 kinect 360. 前几天就已经在旧电脑上配置好了,现在记录在新电脑上的配置过程. 1. ...
- OpenManipulator RM-X52 ROS 开源机械臂
DYNAMIXEL PRO PH54-200-S500-R 简介
- ROS机械臂 Movelt 学习笔记1 | 基础准备
环境:Ubuntu18.04 + ROS Melodic 1. 安装ROS 官网下载安装步骤:http://wiki.ros.org/melodic/Installation/Ubuntu 一键安装的 ...
- ROS连接ABB机械臂调试详细教程-ROS(indigo)和ABB RobotStudio 6.03.02-
在ROS industrial介绍中,给出了ROS和常用机械臂的连接方式.具体信息可以参考:http://wiki.ros.org/Industrial ROS连接ABB机械臂调试详细教程-ROS(i ...
- 基于 Mathematica 的机器人仿真环境(机械臂篇)[转]
完美的教程,没有之一,收藏学习. 目的 本文手把手教你在 Mathematica 软件中搭建机器人的仿真环境,具体包括以下内容(所使用的版本是 Mathematica 11.1,更早的版本可能缺少某些 ...
- ROS机械臂 Movelt 学习笔记2 | Move Group 接口 C++
Movelt为使用者提供了一个最通用且简单的接口 MoveGroupInterface 类,这个接口提供了很多控制机器人的常用基本操作,如: 设置机械臂的位姿 进行运动规划 移动机器人本体 将物品添加 ...
- Ubuntu 16.04 ROS环境配置
最近新入职一家公司,是搞智能无人驾驶的,用的操作系统是Ubuntu和ros,之前没接触过ros系统,既然公司用那就必须的学习啊,话不多说先装它一个ros玩玩... 1. Ubuntu 安装 ROS K ...
- ubuntu16.04 ROS环境下配置和运行SVO
ubuntu16.04 ROS环境下配置和运行SVO https://blog.csdn.net/nnUyi/article/details/78005552
随机推荐
- Linux常用信号快捷键的使用
ctrl-c 发送 SIGINT 信号给前台进程组中的所有进程.常用于终止正在运行的程序.ctrl-z 发送 SIGTSTP 信号给前台进程组中的所有进程,常用于挂起一个进程.ctrl-d 不是发送信 ...
- 15-vim-缩排和重复执行
缩排和重复执行 命令 功能 >> 向右增加缩进 << 向左减少缩进 . 重复上次命令 缩排命令在开发程序时,统一增加代码的缩进比较有用! 一次性在选中代码前增加4个空格,就叫做 ...
- 【Java学习笔记之一】 java关键字及作用
Java关键字及其作用 一. 总览: 访问控制 private protected public 类,方法和变量修饰符 abstract class extends final implements ...
- TurtleBOT3
ubuntu更换源 sudo cp /etc/apt/sources.list /etc/apt/sources_backup.list sudo gedit /etc/apt/sources.lis ...
- Hibernate4之注解零配置
@Entity ,注册在类头上,将一个类声明为一个实体bean(即一个持久化POJO类) . @Table ,注册在类头上,注解声明了该实体bean映射指定的表(table). @Id用来注册主属性, ...
- go之linux安装
下载地址:https://golang.org/dl/ ubuntu16.04安装过程 官方安装文档:https://golang.org/doc/install?download=go1.11.4. ...
- 微信小程序の条件渲染
<view> 今天吃什么 </view> <view wx:if="{{condition==1}}">饺子</view> < ...
- Vim: Overwrite read-only file without quiting vim
当你忘记以sudo命令使用vim编辑一个只读文件时,可以执行以下vim命令强制覆写该文件: :w !sudo tee % > /dev/null 命令太长,可在vimrc文件中做命令映射(映射为 ...
- kubeadm部署多master节点高可用k8s1.16.2
一.架构信息 系统版本:CentOS 7.6 内核:3.10.0‐1062.4.1.el7.x86_64 Kubernetes: v1.16.2 Dockerce: 19.03 推荐硬件配置:2核4 ...
- leetcode-163周赛-1260-二维网格迁移
题目描述: 自己的提交: class Solution: def shiftGrid(self, grid: List[List[int]], k: int) -> List[List[int] ...