ROS中的3D机器人建模(二)
一,创建我们的第一个URDF模型
我们设计的第一个机器人模型是pan-and-tilt机械结构,代码如下
pan_tilt.urdf:
1 <?xml version="1.0"?>
2 <robot name="pan_tilt">
3
4 <link name="base_link">
5
6 <visual>
7 <geometry>
8 <cylinder length="0.01" radius="0.2"/>
9 </geometry>
10 <origin rpy="0 0 0" xyz="0 0 0"/>
11 <material name="yellow">
12 <color rgba="1 1 0 1"/>
13 </material>
14 </visual>
15
16 <collision>
17 <geometry>
18 <cylinder length="0.03" radius="0.2"/>
19 </geometry>
20 <origin rpy="0 0 0" xyz="0 0 0"/>
21 </collision>
22 <inertial>
23 <mass value="1"/>
24 <inertia ixx="1.0" ixy="0.0" ixz="0.0" iyy="1.0" iyz="0.0" izz="1.0"/>
25 </inertial>
26 </link>
27
28 <joint name="pan_joint" type="revolute">
29 <parent link="base_link"/>
30 <child link="pan_link"/>
31 <origin xyz="0 0 0.1"/>
32 <axis xyz="0 0 1" />
33 <limit effort="300" velocity="0.1" lower="-3.14" upper="3.14"/>
34 <dynamics damping="50" friction="1"/>
35 </joint>
36
37 <link name="pan_link">
38 <visual>
39 <geometry>
40 <cylinder length="0.4" radius="0.04"/>
41 </geometry>
42 <origin rpy="0 0 0" xyz="0 0 0.09"/>
43 <material name="red">
44 <color rgba="0 0 1 1"/>
45 </material>
46 </visual>
47 <collision>
48 <geometry>
49 <cylinder length="0.4" radius="0.06"/>
50 </geometry>
51 <origin rpy="0 0 0" xyz="0 0 0.09"/>
52 </collision>
53 <inertial>
54 <mass value="1"/>
55 <inertia ixx="1.0" ixy="0.0" ixz="0.0" iyy="1.0" iyz="0.0" izz="1.0"/>
56 </inertial>
57 </link>
58
59 <joint name="tilt_joint" type="revolute">
60 <parent link="pan_link"/>
61 <child link="tilt_link"/>
62 <origin xyz="0 0 0.2"/>
63 <axis xyz="0 1 0" />
64 <limit effort="300" velocity="0.1" lower="-4.64" upper="-1.5"/>
65 <dynamics damping="50" friction="1"/>
66 </joint>
67
68 <link name="tilt_link">
69 <visual>
70 <geometry>
71 <cylinder length="0.4" radius="0.04"/>
72 </geometry>
73 <origin rpy="0 1.5 0" xyz="0 0 0"/>
74 <material name="green">
75 <color rgba="1 0 0 1"/>
76 </material>
77 </visual>
78 <collision>
79 <geometry>
80 <cylinder length="0.4" radius="0.06"/>
81 </geometry>
82 <origin rpy="0 1.5 0" xyz="0 0 0"/>
83 </collision>
84 <inertial>
85 <mass value="1"/>
86 <inertia ixx="1.0" ixy="0.0" ixz="0.0" iyy="1.0" iyz="0.0" izz="1.0"/>
87 </inertial>
88
89 </link>
90
91
92 </robot>
详解URDF文件
<?xml version= "1.0"?>
<robot name = "pan_tilt">
<robot>标签定义了我们将要创建的机器人的名称。在这里,我们将机器人命名为pan_tilt.
如果我们查看<robot>标签定义之后的部分,我们可以看到pan-and-tilt机器结构中连杆和关节的定义:
<link name ="base_link">
<visual>
<geometry>
<cylinder length= "0.01" radius = "0.2"/>
</geometry>
<origin rpy= "0 0 0" xyz="0 0 0"/>
<material name = "yellow">
<color rgba>="1 1 0 1"/>
</material>
</visual>
</link>
前面的这段代码是pan-and-tilt机械结构的base_link的定义。<visual>标签描述了连杆的可见外观,它将在机器人仿真中显示出来。我们就可以用这个标签来定义连杆的几何形状(圆柱、立方体、球体、网络模型)以及连杆的材质(颜色和纹理)。
<joint name="pan_joint " type ="revolute">
<parent link = "base_link"/>
<child link="pan_link"/>
<origin xyz="0 0 0.1"/>
<axis xyz ="0 0 1"/>
</joint>
在前面的代码片段中,我们定义了一个具有唯一名称和关节类型的关节。在这里我们使用的关节类型是旋转关节(revolute),父连杆和子连杆分别是base_link和pan_link。在此标签内还指定了关节原点。
然后检查urdf是否包含错误,命令如下:
$ check_urdf pan_tilt.urdf
check_urdf命令将解析urdf标签并显示错误(如果有的话),如果一切正常,他将输出如下内容:
robot name is: pan_tilt
---------- Successfully Parsed XML ---------------
root Link: base_link has 1 child(ren)
child(1): pan_link
child(1): tilt_link
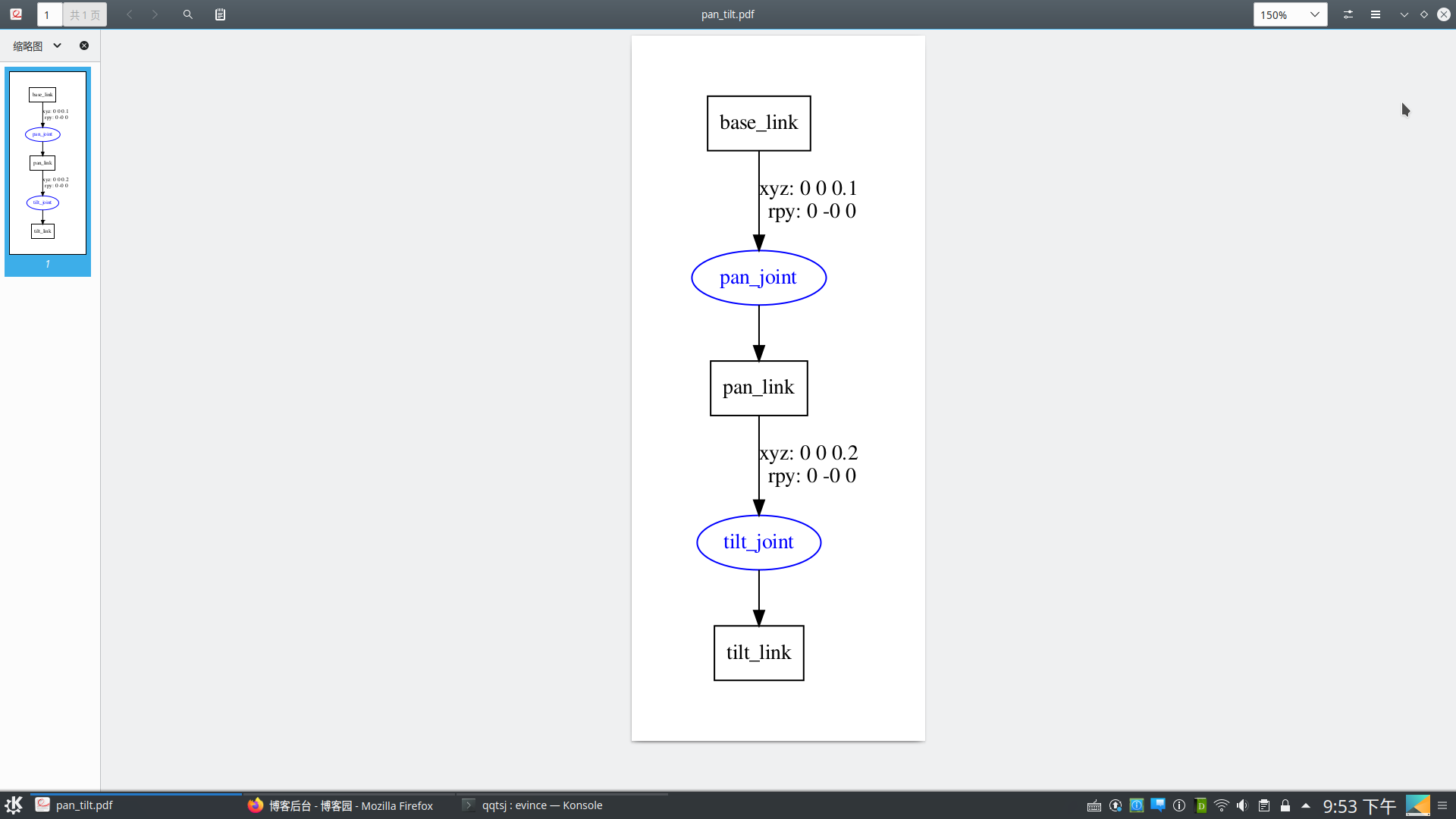
如果我们想以图形化的方式查看机器人连杆和关节的结构,我们可以使用一个名为urdf_to_graphiz的命令行工具:
$ urdf_to_graphiz pan_tilt.urdf
这个命令将生成两个文件:pan_tilt.gv和pan_tilt.pdf.
我们可以使用以下命令来查看此机器人的结构:
$ evince pan_tilt.pdf
如图所示:
二,在RViz中可视化机器人3D模型
设计好URDF后,可以在RViz上查看它。我们可以创建一个view_demo.launch启动文件,代码如下:
1 <launch>
2 <arg name="model" />
3 <param name="robot_description" textfile="$(find mastering_ros_robot_desc ription_pkg)/urdf/pan_tilt.urdf" />
4 <param name="use_gui" value="true"/>
5
6 <node name="joint_state_publisher" pkg="joint_state_publisher" type="join t_state_publisher" />
7 <node name="robot_state_publisher" pkg="robot_state_publisher" type="stat e_publisher" />
8 <node name="rviz" pkg="rviz" type="rviz" args="-d $(find mastering_ros_ro bot_description_pkg)/urdf.rviz" required="true" />
9
10 </launch>
11
我们使用如下命令来启动模型:
$ roslaunch mastering_ros_robot_description_pkg view_demo.launch
如果一切正常,我们将在RViz中看到这个pan-and-tilt机械结构,如图所示

ROS中的3D机器人建模(二)的更多相关文章
- ROS中的3D建模机器人(三)
一.利用xacro理解机器人建模 当我们创建复杂的机器人模型时,URDF的灵活性将会降低,URDF缺少的主要特性是简单的.可重用性,模块化和可编程性. URDF是一个单独的文件我们不能在它里面包含其他 ...
- ROS中3D机器人建模(五)
一.创建一个差速驱动移动机器人模型 前面我们已经创建了一个7-DOF机械臂机器人模型,接下来我们将创建一个差速机器人模型,差速轮式机器人在机器人底盘的两端安装两个轮子, 整个底盘由一个或两个脚轮支撑. ...
- ROS中3D机器人建模(四)
一.创建一个7-DOF机械臂机器人 创建一个名为seven_dof_arm.xacro的文件,写入相应的代码,其关节名称如下: bottom_joint shoulder_pan_joint shou ...
- ROS中3D机器人建模(一)
一,机器人建模的ROS软件包 *urdf : 机器人建模最重要的ros软件包是urdf软件包.这个软件包包含一个用于统一机器人描述格式(URDF)的C++解析器,它是一个表示机器人模型的XML文件,还 ...
- ROS学习笔记十二:使用gazebo在ROS中仿真
想要在ROS系统中对我们的机器人进行仿真,需要使用gazebo. gazebo是一种适用于复杂室内多机器人和室外环境的仿真环境.它能够在三维环境中对多个机器人.传感器及物体进行仿真,产生实际传感器反馈 ...
- ROS_Kinetic_07 ROS中机器人三维物理引擎高保真仿真利器gazebo 7.0
ROS_Kinetic_07 ROS中机器人三维物理引擎高保真仿真利器gazebo 7.0 ROS kinetic中的gazebo版本是7.0,有很多新的特性. 首先,启动gazebo: ~$ gaz ...
- ROS和Gazebo进行机器人仿真(二)
一.在Gazebo中使用ROS控制器 在本节中,我们将讨论如何在Gazebo中让机器人的每个关节运动. 为了让关节动起来,我们需要分配一个ROS控制器,尤其是,我们需要为每个关节连上一个与transm ...
- ROS和Gazebo进行机器人仿真(一)
Gazebo是一种多机器人仿真器,可用于室内外机器人仿真.Gazebo在ROS中有良好的接口,包含ROS和Gazebo的所有控制. 若要实现ROS到Gazebo的通信,我们必须安装ROS-Gazebo ...
- ROS中发布激光扫描消息
激光雷达工作时会先在当前位置发出激光并接收反射光束,解析得到距离信息,而后激光发射器会转过一个角度分辨率对应的角度再次重复这个过程.限于物理及机械方面的限制,激光雷达通常会有一部分“盲区”.使用激光雷 ...
随机推荐
- 【python测试开发栈】帮你总结python random模块高频使用方法
随机数据在平时写python脚本时会经常被用到,比如随机生成0和1来控制逻辑.或者从列表中随机选择一个元素(其实抽奖程序也类似,就是从公司所有人中随机选择中奖用户)等等.这篇文章,就帮大家整理在pyt ...
- 【题解】HDU5845 Best Division (trie树)
[题解]HDU5845 Best Division (trie树) 题意:给定你一个序列(三个参数来根),然后请你划分子段.在每段子段长度小于等于\(L\)且子段的异或和\(\le x\)的情况下最大 ...
- [02]java数据类型和运算符等知识
00 Java中的注释 为了方便程序的阅读,Java语言允许程序员在程序中写上一些说明性的文字,用来提高程序的可读性,这些文字性的说明就称为注释.注释不会出现在字节码文件中,即Java编译器编译时会跳 ...
- 浅谈 OpenGL 中相关阻塞问题
昨天我遇到一个问题,问题如下: 我使用了延迟渲染,我的渲染流程是:Pass1 --> CUDA并行计算 -->Pass2 CUDA并行计算中需要使用Pass1渲染生成的两张纹理,然而我在G ...
- 小小知识点(二十五)5G关键技术——Massive MIMO(大规模天线阵列)和beamforming(波束成形)
转自http://www.elecfans.com/d/949864.html 多输入多输出技术(Multiple-Input Multiple-Output,MIMO)是指在发射端和接收端分别使用多 ...
- Eclipse配置运行内存
对于一些大的项目,运行时等待过长可能出现内存溢出现象,需要重新配置IDE运行内存大小,如下: 1.配置Eclipse.ini 如图再改大点: -Xms512m-Xmx512m 2.JDK内存扩大 Wc ...
- 剑指Offer-3~9题
3. 数组中重复的数字 题目描述: 在一个长度为 \(n\) 的数组里的所有数字都在 \(0\) 到 \(n-1\) 的范围内. 数组中某些数字是重复的,但不知道有几个数字是重复的,也不知道每个 ...
- python列表的方法(改变原列表)
xxx.append() 末尾添加一个元素效果图: 代码: # append() 末尾添加一个元素 my_list = ['] print('原列表:',my_list) my_list.a ...
- numpy 索引和切片
一.取行 1.单行 数组[index, :] # 取第index+1行 例子 import numpy as np arr1 = np.arange(0, 24).reshape(4, 6) # 取第 ...
- get_字段_display()
gender_choices = ((1, '男'), (2, '女')) gender = models.IntegerField(verbose_name='性别', choices=gender ...