Linux下串口编程【转】
本文转载自:http://blog.csdn.net/w282529350/article/details/7378388
/************声明:本人只是见到这篇文章对我帮助很大才转载的,但是这个完整的程序里面本来有语法错误的,现在让我改过来了************/
---------------------------------------------------------
Author :tiger-john
WebSite :blog.csdn.net/tigerjb
Email :jibo.tiger@gmail.com
Update-Time : 2011年2月14日星期一
Tiger声明:本人鄙视直接复制本人文章而不加出处的个人或团体,
但不排斥别人转载tiger-john的文章,只是请您注明出处并和本人
联系或留言给我。3Q
---------------------------------------------------------
前面已经提到过Linux下皆为文件,这当然也包括我们今天的主角àUART0串口。因此对他的一切操作都和文件的操作一样(涉及到了open,read,write,close等文件的基本操作)。
一.Linux下的串口编程又那几部分组成
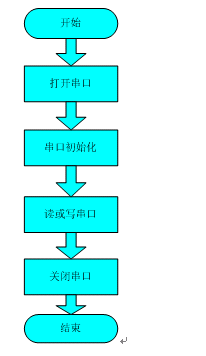
1. 打开串口
2. 串口初始化
3. 读串口或写串口
4. 关闭串口
二.串口的打开
既然串口在linux中被看作了文件,那么在对文件进行操作前先要对其进行打开操作。
1.在Linxu中,串口设备是通过串口终端设备文件来访问的,即通过访问/dev/ttyS0,/dev/ttyS1,/dev/ttyS2这些设备文件实现对串口的访问。
2.调用open()函数来代开串口设备,对于串口的打开操作,必须使用O_NOCTTY参数。
l O_NOCTTY:表示打开的是一个终端设备,程序不会成为该端口的控制终端。如果不使用此标志,任务一个输入(eg:键盘中止信号等)都将影响进程。
l O_NDELAY:表示不关心DCD信号线所处的状态(端口的另一端是否激活或者停止)。
3.打开串口模块有那及部分组成
1>调用open()函数打开串口,获取串口设备文件描述符
2>获取串口状态,判断是否阻塞
3>测试打开的文件描述符是否为终端设备

4程序:
/*****************************************************************
* 名称: UART0_Open
* 功能: 打开串口并返回串口设备文件描述
* 入口参数: fd :文件描述符 port :串口号(ttyS0,ttyS1,ttyS2)
* 出口参数: 正确返回为1,错误返回为0
*****************************************************************/
int UART0_Open(int fd,char* port)
{
fd = open( port, O_RDWR|O_NOCTTY|O_NDELAY);
if (FALSE == fd)
{
perror("Can't Open Serial Port");
return(FASLE);
}
//判断串口的状态是否为阻塞状态
if(fcntl(fd, F_SETFL, 0) < 0)
{
printf("fcntl failed!/n");
return(FALSE);
}
else
{
printf("fcntl=%d/n",fcntl(fd, F_SETFL,0));
}
//测试是否为终端设备
if(0 == isatty(STDIN_FILENO))
{
printf("standard input is not a terminal device/n");
return(FALSE);
}
else
{
printf("isatty success!/n");
}
printf("fd->open=%d/n",fd);
return fd;
}
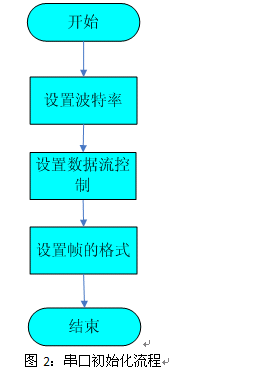
三.串口的初始化
1. 在linux中的串口初始化和前面的串口初始化一样。需要设置串口波特率,数据流控制,帧的格式(即数据位个数,停止位,校验位,数据流控制)
2. 串口初始化模块有那几部分组成:
1>.设置波特率
2>设置数据流控制
2>设置帧的格式(即数据位个数,停止位,校验位)
John哥说明:
1>设置串口参数时要用到termios结构体,因此先要通过函数
tcgettattr(fd,&options)获得串口指向termios结构的指针。
2>通过cfsetispeed函数和cfsetospeed函数用来设置串口的输入/输出波特率。一般情况下,输入和输出波特率相等的。
3>设置数据位可以通过修改termios机构体中c_flag来实现。其中CS5,CS6,CS7,CS8对应数据位的5,6,7,8。在设置数据位时,必须要用CSIZE做位屏蔽。
4>数据流控制是使用何种方法来标志数据传输的开始和结束。
5>在设置完波特率,数据流控制,数据位,校验位,停止位,停止位后,还要设置最小等待时间和最小接收字符。
6>在完成配置后要通过tcsetattr()函数来激活配置。
3.程序:
/*******************************************************************
* 名称: UART0_Set
* 功能: 设置串口数据位,停止位和效验位
* 入口参数: fd 串口文件描述符
* speed 串口速度
* flow_ctrl 数据流控制
* databits 数据位 取值为 7 或者8
* stopbits 停止位 取值为 1 或者2
* parity 效验类型 取值为N,E,O,,S
*出口参数: 正确返回为1,错误返回为0
*******************************************************************/
int UART0_Set(int fd,int speed,int flow_ctrl,int databits,int stopbits,int parity)
{
int i;
int status;
int speed_arr[] = { B38400, B19200, B9600, B4800, B2400, B1200, B300,
B38400, B19200, B9600, B4800, B2400, B1200, B300 };
int name_arr[] = {38400, 19200, 9600, 4800, 2400, 1200, 300, 38400, 19200, 9600, 4800, 2400, 1200, 300 };
struct termios options;
/*tcgetattr(fd,&options)得到与fd指向对象的相关参数,并将它们保存于options,该函数,还可以测试配置是否正确,该串口是否可用等。若调用成功,函数返回值为0,若调用失败,函数返回值为1.
*/
if ( tcgetattr( fd,&options) != 0)
{
perror("SetupSerial 1");
return(FALSE);
}
//设置串口输入波特率和输出波特率
for ( i= 0; i < sizeof(speed_arr) / sizeof(int); i++)
{
if (speed == name_arr[i])
{
cfsetispeed(&Options, speed_arr[i]);
cfsetospeed(&Options, speed_arr[i]);
}
}
//修改控制模式,保证程序不会占用串口
options.c_cflag |= CLOCAL;
//修改控制模式,使得能够从串口中读取输入数据
options.c_cflag |= CREAD;
//设置数据流控制
switch(flow_ctrl)
{
case 0 ://不使用流控制
options.c_cflag &= ~CRTSCTS;
break;
case 1 ://使用硬件流控制
options.c_cflag |= CRTSCTS;
break;
case 2 ://使用软件流控制
options.c_cflag |= IXON | IXOFF | IXANY;
break;
}
//设置数据位
options.c_cflag &= ~CSIZE; //屏蔽其他标志位
switch (databits)
{
case 5 :
options.c_cflag |= CS5;
break;
case 6 :
options.c_cflag |= CS6;
break;
case 7 :
options.c_cflag |= CS7;
break;
case 8:
options.c_cflag |= CS8;
break;
default:
fprintf(stderr,"Unsupported data size/n");
return (FALSE);
}
//设置校验位
switch (parity)
{
case 'n':
case 'N': //无奇偶校验位。
options.c_cflag &= ~PARENB;
options.c_iflag &= ~INPCK;
break;
case 'o':
case 'O'://设置为奇校验
options.c_cflag |= (PARODD | PARENB);
options.c_iflag |= INPCK;
break;
case 'e':
case 'E'://设置为偶校验
options.c_cflag |= PARENB;
options.c_cflag &= ~PARODD;
options.c_iflag |= INPCK;
break;
case 's':
case 'S': //设置为空格
options.c_cflag &= ~PARENB;
options.c_cflag &= ~CSTOPB;
break;
default:
fprintf(stderr,"Unsupported parity/n");
return (FALSE);
}
// 设置停止位
switch (stopbits)
{
case 1:
options.c_cflag &= ~CSTOPB;
break;
case 2:
options.c_cflag |= CSTOPB;
break;
default:
fprintf(stderr,"Unsupported stop bits/n");
return (FALSE);
}
//修改输出模式,原始数据输出
options.c_oflag &= ~OPOST;
//设置等待时间和最小接收字符
options.c_cc[VTIME] = 1; /* 读取一个字符等待1*(1/10)s */
options.c_cc[VMIN] = 1; /* 读取字符的最少个数为1 */
//如果发生数据溢出,接收数据,但是不再读取
tcflush(fd,TCIFLUSH);
//激活配置 (将修改后的termios数据设置到串口中)
if (tcsetattr(fd,TCSANOW,&options) != 0)
{
perror("com set error!/n");
return (FALSE);
}
return (TRUE);
}
/*******************************************************************
* 名称: UART0_Init()
* 功能: 串口初始化
* 入口参数: fd 文件描述符
* speed 串口速度
* flow_ctrl 数据流控制
* databits 数据位 取值为 7 或者8
* stopbits 停止位 取值为 1 或者2
* parity 效验类型 取值为N,E,O,,S
* 出口参数: 正确返回为1,错误返回为0
*******************************************************************/
int UART0_Init(int fd, int speed,int flow_ctrlint databits,int stopbits,int parity)
{
int err;
//设置串口数据帧格式
if (UART0_Set(fd,115200,0,8,1,'N') == FALSE)
{
return FALSE;
}
else
{
return TRUE;
}
}
注:
如果不是开发终端之类的,只是串口传输数据,而不需要串口来处理,那么使用原始模式(Raw Mode)方式来通讯,设置方式如下:
options.c_lflag &= ~(ICANON | ECHO | ECHOE | ISIG); /*Input*/
options.c_oflag &= ~OPOST; /*Output*/
四. 串口的读写函数:
1. 读写串口是通过使用read函数和write函数来实现的。
2. 程序
/*******************************************************************
* 名称: UART0_Recv
* 功能: 接收串口数据
* 入口参数: fd :文件描述符
* rcv_buf :接收串口中数据存入rcv_buf缓冲区中
* data_len :一帧数据的长度
* 出口参数: 正确返回为1,错误返回为0
*******************************************************************/
int UART0_Recv(int fd, char *rcv_buf,int data_len)
{
int len,fs_sel;
fd_set fs_read;
struct timeval time;
FD_ZERO(&fs_read);
FD_SET(fd,&fs_read);
time.tv_sec = 10;
time.tv_usec = 0;
//使用select实现串口的多路通信
fs_sel = select(fd+1,&fs_read,NULL,NULL,&time);
if(fs_sel)
{
len = read(fd,data,data_len);
return len;
}
else
{
return FALSE;
}
}
/*******************************************************************
* 名称: UART0_Send
* 功能: 发送数据
* 入口参数: fd :文件描述符
* send_buf :存放串口发送数据
* data_len :一帧数据的个数
* 出口参数: 正确返回为1,错误返回为0
*******************************************************************/
int UART0_Send(int fd, char *send_buf,int data_len)
{
int len = 0;
len = write(fd,send_buf,data_len);
if (len == data_len )
{
return len;
}
else
{
tcflush(fd,TCOFLUSH);
return FALSE;
}
}
五. 关闭串口
在完成对串口设备的操作后,要调用close函数关闭该文件描述符。
程序:
/******************************************************
* 名称: UART0_Close
* 功能: 关闭串口并返回串口设备文件描述
* 入口参数: fd :文件描述符
* 出口参数: void
*******************************************************************/
void UART0_Close(int fd)
{
close(fd);
}
一. 一个完整程序
- /************************Copyright(c)*******************************
- ** 西安邮电学院
- ** graduate school
- ** XNMS项目组
- ** WebSite :blog.csdn.net/tigerjb
- **------------------------------------------FileInfo-------------------------------------------------------
- ** File name: main.c
- ** Last modified Date: 2011-01-31
- ** Last Version: 1.0
- ** Descriptions:
- **------------------------------------------------------------------------------------------------------
- ** Created by: 冀博
- ** Created date: 2011-01-31
- ** Version: 1.0
- ** Descriptions: The original version
- **------------------------------------------------------------------------------------------------------
- ** Modified by:
- ** Modified date:
- ** Version:
- ** Descriptions:
- *******************************************************************/
- //串口相关的头文件
- #include<stdio.h> /*标准输入输出定义*/
- #include<stdlib.h> /*标准函数库定义*/
- #include<unistd.h> /*Unix 标准函数定义*/
- #include<sys/types.h>
- #include<sys/stat.h>
- #include<fcntl.h> /*文件控制定义*/
- #include<termios.h> /*PPSIX 终端控制定义*/
- #include<errno.h> /*错误号定义*/
- #include<string.h>
- //宏定义
- #define FALSE -1
- #define TRUE 0
- /*******************************************************************
- * 名称: UART0_Open
- * 功能: 打开串口并返回串口设备文件描述
- * 入口参数: fd :文件描述符 port :串口号(ttyS0,ttyS1,ttyS2)
- * 出口参数: 正确返回为1,错误返回为0
- *******************************************************************/
- int UART0_Open(int fd,char* port)
- {
- fd = open( port, O_RDWR|O_NOCTTY|O_NDELAY);
- if (FALSE == fd)
- {
- perror("Can't Open Serial Port");
- return(FALSE);
- }
- //恢复串口为阻塞状态
- if(fcntl(fd, F_SETFL, 0) < 0)
- {
- printf("fcntl failed!\n");
- return(FALSE);
- }
- else
- {
- printf("fcntl=%d\n",fcntl(fd, F_SETFL,0));
- }
- //测试是否为终端设备
- if(0 == isatty(STDIN_FILENO))
- {
- printf("standard input is not a terminal device\n");
- return(FALSE);
- }
- else
- {
- printf("isatty success!\n");
- }
- printf("fd->open=%d\n",fd);
- return fd;
- }
- /*******************************************************************
- * 名称: UART0_Close
- * 功能: 关闭串口并返回串口设备文件描述
- * 入口参数: fd :文件描述符 port :串口号(ttyS0,ttyS1,ttyS2)
- * 出口参数: void
- *******************************************************************/
- void UART0_Close(int fd)
- {
- close(fd);
- }
- /*******************************************************************
- * 名称: UART0_Set
- * 功能: 设置串口数据位,停止位和效验位
- * 入口参数: fd 串口文件描述符
- * speed 串口速度
- * flow_ctrl 数据流控制
- * databits 数据位 取值为 7 或者8
- * stopbits 停止位 取值为 1 或者2
- * parity 效验类型 取值为N,E,O,,S
- *出口参数: 正确返回为1,错误返回为0
- *******************************************************************/
- int UART0_Set(int fd,int speed,int flow_ctrl,int databits,int stopbits,int parity)
- {
- int i;
- int status;
- int speed_arr[] = { B115200, B19200, B9600, B4800, B2400, B1200, B300};
- int name_arr[] = {115200, 19200, 9600, 4800, 2400, 1200, 300};
- struct termios options;
- /*tcgetattr(fd,&options)得到与fd指向对象的相关参数,并将它们保存于options,该函数还可以测试配置是否正确,该串口是否可用等。若调用成功,函数返回值为0,若调用失败,函数返回值为1.
- */
- if ( tcgetattr( fd,&options) != 0)
- {
- perror("SetupSerial 1");
- return(FALSE);
- }
- //设置串口输入波特率和输出波特率
- for ( i= 0; i < sizeof(speed_arr) / sizeof(int); i++)
- {
- if (speed == name_arr[i])
- {
- cfsetispeed(&options, speed_arr[i]);
- cfsetospeed(&options, speed_arr[i]);
- }
- }
- //修改控制模式,保证程序不会占用串口
- options.c_cflag |= CLOCAL;
- //修改控制模式,使得能够从串口中读取输入数据
- options.c_cflag |= CREAD;
- //设置数据流控制
- switch(flow_ctrl)
- {
- case 0 ://不使用流控制
- options.c_cflag &= ~CRTSCTS;
- break;
- case 1 ://使用硬件流控制
- options.c_cflag |= CRTSCTS;
- break;
- case 2 ://使用软件流控制
- options.c_cflag |= IXON | IXOFF | IXANY;
- break;
- }
- //设置数据位
- //屏蔽其他标志位
- options.c_cflag &= ~CSIZE;
- switch (databits)
- {
- case 5 :
- options.c_cflag |= CS5;
- break;
- case 6 :
- options.c_cflag |= CS6;
- break;
- case 7 :
- options.c_cflag |= CS7;
- break;
- case 8:
- options.c_cflag |= CS8;
- break;
- default:
- fprintf(stderr,"Unsupported data size\n");
- return (FALSE);
- }
- //设置校验位
- switch (parity)
- {
- case 'n':
- case 'N': //无奇偶校验位。
- options.c_cflag &= ~PARENB;
- options.c_iflag &= ~INPCK;
- break;
- case 'o':
- case 'O'://设置为奇校验
- options.c_cflag |= (PARODD | PARENB);
- options.c_iflag |= INPCK;
- break;
- case 'e':
- case 'E'://设置为偶校验
- options.c_cflag |= PARENB;
- options.c_cflag &= ~PARODD;
- options.c_iflag |= INPCK;
- break;
- case 's':
- case 'S': //设置为空格
- options.c_cflag &= ~PARENB;
- options.c_cflag &= ~CSTOPB;
- break;
- default:
- fprintf(stderr,"Unsupported parity\n");
- return (FALSE);
- }
- // 设置停止位
- switch (stopbits)
- {
- case 1:
- options.c_cflag &= ~CSTOPB; break;
- case 2:
- options.c_cflag |= CSTOPB; break;
- default:
- fprintf(stderr,"Unsupported stop bits\n");
- return (FALSE);
- }
- //修改输出模式,原始数据输出
- options.c_oflag &= ~OPOST;
- options.c_lflag &= ~(ICANON | ECHO | ECHOE | ISIG);//我加的
- //options.c_lflag &= ~(ISIG | ICANON);
- //设置等待时间和最小接收字符
- options.c_cc[VTIME] = 1; /* 读取一个字符等待1*(1/10)s */
- options.c_cc[VMIN] = 1; /* 读取字符的最少个数为1 */
- //如果发生数据溢出,接收数据,但是不再读取 刷新收到的数据但是不读
- tcflush(fd,TCIFLUSH);
- //激活配置 (将修改后的termios数据设置到串口中)
- if (tcsetattr(fd,TCSANOW,&options) != 0)
- {
- perror("com set error!\n");
- return (FALSE);
- }
- return (TRUE);
- }
- /*******************************************************************
- * 名称: UART0_Init()
- * 功能: 串口初始化
- * 入口参数: fd : 文件描述符
- * speed : 串口速度
- * flow_ctrl 数据流控制
- * databits 数据位 取值为 7 或者8
- * stopbits 停止位 取值为 1 或者2
- * parity 效验类型 取值为N,E,O,,S
- *
- * 出口参数: 正确返回为1,错误返回为0
- *******************************************************************/
- int UART0_Init(int fd, int speed,int flow_ctrl,int databits,int stopbits,int parity)
- {
- int err;
- //设置串口数据帧格式
- if (UART0_Set(fd,19200,0,8,1,'N') == FALSE)
- {
- return FALSE;
- }
- else
- {
- return TRUE;
- }
- }
- /*******************************************************************
- * 名称: UART0_Recv
- * 功能: 接收串口数据
- * 入口参数: fd :文件描述符
- * rcv_buf :接收串口中数据存入rcv_buf缓冲区中
- * data_len :一帧数据的长度
- * 出口参数: 正确返回为1,错误返回为0
- *******************************************************************/
- int UART0_Recv(int fd, char *rcv_buf,int data_len)
- {
- int len,fs_sel;
- fd_set fs_read;
- struct timeval time;
- FD_ZERO(&fs_read);
- FD_SET(fd,&fs_read);
- time.tv_sec = 10;
- time.tv_usec = 0;
- //使用select实现串口的多路通信
- fs_sel = select(fd+1,&fs_read,NULL,NULL,&time);
- if(fs_sel)
- {
- len = read(fd,rcv_buf,data_len);
- printf("I am right!(version1.2) len = %d fs_sel = %d\n",len,fs_sel);
- return len;
- }
- else
- {
- printf("Sorry,I am wrong!");
- return FALSE;
- }
- }
- /********************************************************************
- * 名称: UART0_Send
- * 功能: 发送数据
- * 入口参数: fd :文件描述符
- * send_buf :存放串口发送数据
- * data_len :一帧数据的个数
- * 出口参数: 正确返回为1,错误返回为0
- *******************************************************************/
- int UART0_Send(int fd, char *send_buf,int data_len)
- {
- int len = 0;
- len = write(fd,send_buf,data_len);
- if (len == data_len )
- {
- return len;
- }
- else
- {
- tcflush(fd,TCOFLUSH);
- return FALSE;
- }
- }
- int main(int argc, char **argv)
- {
- int fd; //文件描述符
- int err; //返回调用函数的状态
- int len;
- int i;
- char rcv_buf[100];
- char send_buf[20]="tiger john";
- if(argc != 3)
- {
- printf("Usage: %s /dev/ttySn 0(send data)/1 (receive data) \n",argv[0]);
- return FALSE;
- }
- fd = UART0_Open(fd,argv[1]); //打开串口,返回文件描述符
- do{
- err = UART0_Init(fd,19200,0,8,1,'N');
- printf("Set Port Exactly!\n");
- }while(FALSE == err || FALSE == fd);
- if(0 == strcmp(argv[2],"0"))
- {
- for(i = 0;i < 10;i++)
- {
- len = UART0_Send(fd,send_buf,10);
- if(len > 0)
- printf(" %d send data successful\n",i);
- else
- printf("send data failed!\n");
- sleep(2);
- }
- UART0_Close(fd);
- }
- else
- {
- while (1) //循环读取数据
- {
- len = UART0_Recv(fd, rcv_buf,9);
- if(len > 0)
- {
- rcv_buf[len] = '\0';
- printf("receive data is %s\n",rcv_buf);
- printf("len = %d\n",len);
- }
- else
- {
- printf("cannot receive data\n");
- }
- sleep(2);
- }
- UART0_Close(fd);
- }
- }
- /********************************************************************* End Of File **
- *******************************************************************/
Linux下串口编程【转】的更多相关文章
- Linux下串口编程入门
简介: Linux操作系统从一开始就对串行口提供了很好的支持,本文就Linux下的串行口通讯编程进行简单的介绍. 串口简介 串行口是计算机一种常用的接口,具有连接线少,通讯简单,得到广泛的使用.常用 ...
- Linux下串口編程遇到的接收数据错误及原因(0x0d,0x11接收错误)
摘要:Linux下串口编程遇到的接收数据错误及原因 来源:https://dotblogs.com.tw/k/2012/07/24/73572 近日在调试串口的时候发现,另一设备向我ARM板的串口发送 ...
- linux下串口通信与管理
linux下的串口与windows有一些区别,下面将介绍一下linux下串口通信管理 查看是否支持USB串口: #lsmod | grep usbserial 如果没有信息:sudo apt-get ...
- linux 下 poll 编程
poll 与 select 很类似,都是对描述符进行遍历,查看是否有描述符就绪.如果有就返回就绪文件描述符的个数将.poll 函数如下: #include <poll.h> int pol ...
- Linux下Socket编程的端口问题( Bind error: Address already in use )
Linux下Socket编程的端口问题( Bind error: Address already in use ) 在进行linux网络编程时,每次修改了源代码并再次编译运行时,常遇到下面的地使用错误 ...
- Linux 下IOport编程訪问
曾经写的一篇笔记.偶尔翻出来了,放在这里做个纪念 Linux 下IOport编程訪问 这里记录的方法是在用户态訪问IOport,不涉及驱动程序的编写. 首先要包括头文件 /usr/include/as ...
- linux下socket编程实例
linux下socket编程实例一.基本socket函数Linux系统是通过提供套接字(socket)来进行网络编程的.网络的socket数据传输是一种特殊的I/O,socket也是一种文件描述符.s ...
- Linux 下shell 编程学习脚手架
linux body { font-family: Helvetica, arial, sans-serif; font-size: 14px; line-height: 1.6; padding-t ...
- linux下libnet编程 亲自测试可用
linux下libnet编程 亲自测试可用 亲自测试 如果build包的时候 只要把类型改了 就能改成相应的协议. 0x0800 ip 0x0806 arp 0x86DD IPv6 0x86e ...
随机推荐
- php数组遍历
<?php $arr = array('a','b','c','d','e','f'); //for语句只能遍历索引数组 for($i = 0; $i < 6; $i++){ echo $ ...
- PHP登陆Session验证
关键字:PHP Session 登陆 验证 本文地址:http://www.cnblogs.com/txw1958/p/php-login-check-session.html 首先,在MySQL数据 ...
- python中新式类和经典类的区别
1).python在类中的定义在py2-3版本上是使用的有新式类和经典类两种情况,在新式类和经典类的定义中最主要的区别是在定义类的时候是否出现引用object;如:经典类:Class 类名::而新式类 ...
- 8、JavaScript深入浅出——数据类型
一.六种数据类型 Javascript是弱类型. 五种原始类型和一种对象类型: number String boolean null undefined Object 二.隐式转换 +与-的运算举例: ...
- django apache 通过wsgi部署
生产上部署django 1. 修改settings关闭debug DEBUG = False ALLOWED_HOSTS = ['*'] 2. 安装wsgi yum -y install mod_ws ...
- 配置和使用buffer cache
存放从磁盘读取的数据.排序和并行读不会使用buffer cache 可以从v$db_cache_advice或者buffer cache的命中率来检查buffer cache设置是否合理 查看v$db ...
- 审计参数 audit_trail
audit_trail参数定义了在哪里存放审计记录 默认是DB.如果将其设置为NONE,标准数据库审计功能被取消.audit_trail是静态参数,修改后必须重启数据库. 可以设置的值:- ...
- EBS运行快速安装的程序时,提示DISPLAY变量设置不对
EBS运行快速安装的程序时,系统提示如下: Rapid Install Wizard is validating your file system...... >> Wizard requ ...
- css 正方体
<!DOCTYPE html><html lang="zh-cmn-Hans"><head><meta charset="utf ...
- LCA和RMQ
下面写提供几个学习LCA和RMQ的博客,都很通熟易懂 http://dongxicheng.org/structure/lca-rmq/ 这个应该是讲得最好的,且博主还有很多其他文章,可以读读,感觉认 ...