STM32 HAL库学习 (2) USART实验
使用STM32F407
串口:PA9、PA10(利用CH340G驱动)
一、 stm32f4xx_hal_uart.c 函数说明
- HAL_UART_Init 函数
要使用一个外设首先要对它进行初始化,所以先看串口的初始化函数,其声明如下:
HAL_StatusTypeDef HAL_UART_Init(UART_HandleTypeDef *huart);
函数描述:
用于初始化异步模式的收发器。
函数形参:
形参 1 是串口的句柄,UART_HandleTypeDef 结构体类型,其定义如下:
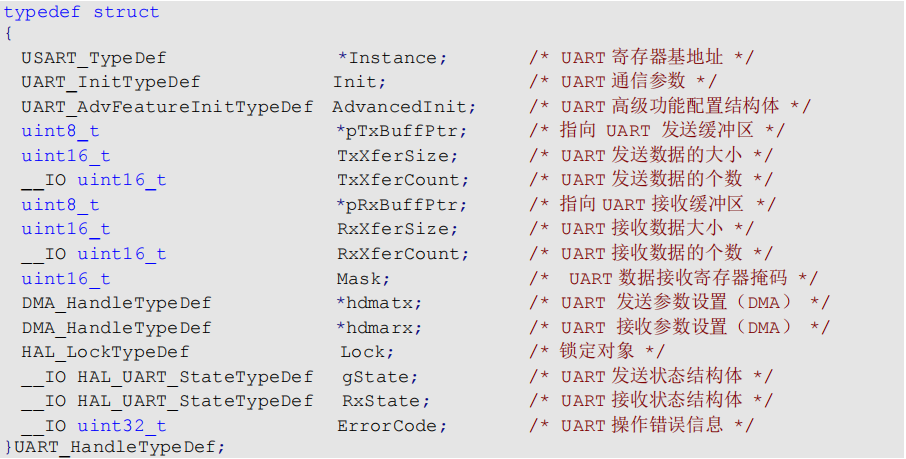
1)Instance:指向 UART 寄存器基地址。实际上这个基地址 HAL 库已经定义好了,可以选择范围:USART1~ USART3、USART6、UART4、UART5。
2)Init:UART 初始化结构体,用于配置通讯参数,如波特率、数据位数、停止位等等。下面我们再详细讲解这个结构体。
3)AdvancedInit:用于配置高级功能,如自动波特率,MSB 先行等。
4)pTxBuffPtr,TxXferSize,TxXferCount:分别是指向发送数据缓冲区的指针,发送数据的大小,发送数据的个数。
5)pRxBuffPtr,RxXferSize,RxXferCount:分别是指向接收数据缓冲区的指针,接受数据的大小,接收数据的个数。
6)Mask:UART 数据接收寄存器的掩码,用于存放数据的校验位。
7)hdmatx,hdmarx:配置串口发送接收数据的 DMA 具体参数。
8)Lock:对资源操作增加操作锁保护,可选 HAL_UNLOCKED 或者 HAL_LOCKED 两个参数。如果 gState 的值等于 HAL_UART_STATE_RESET,则认为串口未被初始化,此时,分配锁资源,并且调用 HAL_UART_MspInit 函数来对串口的 GPIO 和时钟进行初始化。
9)gState,RxState:分别是 UART 的发送状态、工作状态的结构体和 UART 接受状态的结构
体。HAL_UART_StateTypeDef 是一个枚举类型,列出串口在工作过程中的状态值,有些值只
适用于 gState,如 HAL_UART_STATE_BUSY。
10)ErrorCode:串口错误操作信息。主要用于存放串口操作的错误信息。
UART_InitTypedef:
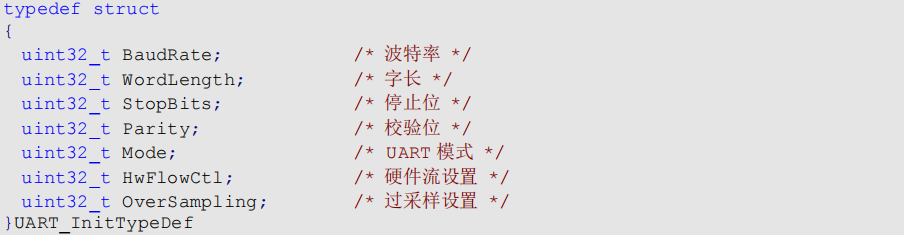
1)BaudRate:波特率设置。一般设置为 2400、9600、19200、115200。
2)WordLength:数据帧字长,可选 8 位或 9 位。这里我们设置为 8 位字长数据格式。
3)StopBits:停止位设置,可选 0.5 个、1 个、1.5 个和 2 个停止位,一般我们选择 1 个停止位。
4)Parity:奇偶校验控制选择,我们设定为无奇偶校验位。
5)Mode:UART 模式选择,可以设置为只收模式,只发模式,或者收发模式。这里我们设置为全双工收发模式。
6)HwFlowCtl:硬件流控制选择,我们设置为无硬件流控制。
7)OverSampling:过采样选择,选择 8 倍过采样或者 16 过采样,一般选择 16 过采样。
函数返回值:
HAL_StatusTypeDef 枚举类型的值,有 4 个,分别是 HAL_OK 表示成功,HAL_ERROR 表示错误,HAL_BUSY 表示忙碌,HAL_TIMEOUT 超时。后续遇到该结构体也是一样的。
- HAL_UART_Receive_IT 函数
HAL_UART_Receive_IT 函数是开启串口接收中断函数。其声明如下:

函数描述:
用于开启以中断的方式接收指定字节。数据接收在中断处理函数里面实现。
函数形参:
形参 1 是 UART_HandleTypeDef 结构体指针类型的串口句柄。
形参 2 是要接收的数据地址。
形参 3 是要接收的数据大小,以字节为单位。
函数返回值:
HAL_StatusTypeDef 枚举类型的值。
- HAL_UART_IRQHandler 函数
HAL_UART_IRQHandler 函数是 HAL 库中断处理公共函数。其声明如下:

函数描述:
该函数是 HAL 库中断处理公共函数,在串口中断服务函数中被调用。
函数形参:
形参 1 是 UART_HandleTypeDef 结构体指针类型的串口句柄。
函数返回值:
无
注意事项:
该函数是 HAL 库已经定义好,用户一般不能随意修改。如果用户要在中断中实现自己的逻辑代码,可以直接在函数 HAL_UART_IRQHandler 的前面或者后面添加新代码,也可以直接在HAL_UART_IRQHandler 调用的各种回调函数里面执行,这些回调都是弱定义的,方便用户直接在其它文件里面重定义。串口回调函数主要有下面几个:

本实验我们用到的是接收回调函数 HAL_UART_RxCpltCallback,就是在接收回调函数里面编写我们的接收逻辑代码,具体请参考实验源码。
二、串口通信配置步骤
- 串口参数初始化(波特率、字长、奇偶校验等),并使能串口。
HAL 库通过调用串口初始化函数 HAL_UART_Init 完成对串口参数初始化,详见例程源码。
注意:该函数会调用:HAL_UART_MspInit 函数来完成对串口底层的初始化,包括:串口
及 GPIO 时钟使能、GPIO 模式设置、中断设置等。
2)使能串口和 GPIO 口时钟
本实验用到 USART1 串口,使用 PA9 和 PA10 作为串口的 TX 和 RX 脚,因此需要先使能USART1 和 GPIOA 时钟。参考代码如下:

3)GPIO 模式设置(速度、上下拉、复用功能等)
GPIO 模式设置通过调用 HAL_GPIO_Init 函数实现,详见本例程源码。
4)开启串口相关中断,配置串口中断优先级
本实验我们使用串口中断来接收数据。我们使用 HAL_UART_Receive_IT 函数开启串口中断接收,并设置接收 buffer 及其长度。通过 HAL_NVIC_EnableIRQ 函数使能串口中断,通过HAL_NVIC_SetPriority 函数设置中断优先级。
5)编写中断服务函数
串口 1 中断服务函数为:USART1_IRQHandler,当发生中断的时候,程序就会执行中断服务函数。HAL 库为了使用方便,提供了一个串口中断通用处理函数 HAL_UART_IRQHandler,该函数在串口接收完数据后,又会调用回调函数 HAL_UART_RxCpltCallback,用于给用户处理串口接收到的数据。
因此我们需要在 HAL_UART_RxCpltCallback 函数实现数据接收处理,详见本例程源码。
6)串口数据接收和发送
最后我们可以通过读写 USART_DR 寄存器,完成串口数据的接收和发送,HAL 库也给我们提供了:HAL_UART_Receive 和 HAL_UART_Transmit 两个函数用于串口数据的接收和发送。大家可以根据实际情况选择使用那种方式来收发串口数据。
三、STM32CubeMX配置USART1
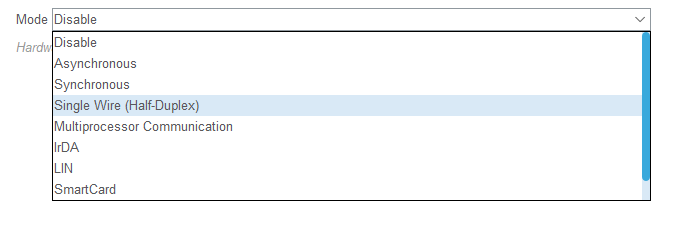
Disable:不进行配置
Asynchronous:异步。对于USART来说大家几乎都用的异步通信。
Synchronous:同步
Single Wire(Half-Duplex):单线(半双工)模式
Multiprocessor Communication:多处理器通信
IrDA:Infrared Data Association,即IrDA协议栈,红外通信
LIN:LIN总线是目前常见的一种A类网络协议。LIN的全称为Local Interconnect Network。LIN主要功能是为CAN总线网络提供辅助功能。局域互联网模式
SmartCard:IC卡/智能卡模式

Hardware Flow Control (RS232):)是串口工作在异步模式下的选项,配置是否需要硬流控RTS 、CTS ;
Disable:不进行配置
CTS Only:(Clear ToSend,发送允许)为输入信号,用于判断是否可以向对方发送数据,低电平有效,低电平说明本设备可以向对方发送数据。
RTS Only:(Require ToSend,发送请求)为输出信号,用于指示本设备准备好可接收数据,低电平有效,低电平说明本设备可以接收数据。
CTS/RTS:假如串口1和串口2相互通信,都开了硬流控,那么就是串口1的RTS接串口2的CTS,串口1的CTS接串口2的RTS。
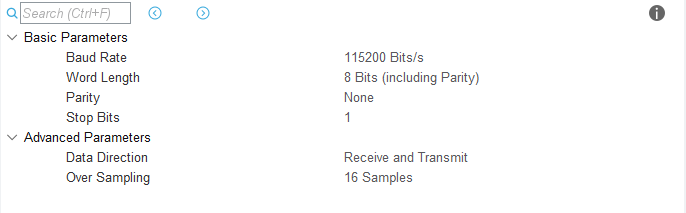
Word Length : 数据位
Parity :校验位
Data Direction :数据方向
Over Sampling:过样率
STM32 HAL库学习 (2) USART实验的更多相关文章
- STM32 HAL库学习系列第8篇---回调函数总结
普通函数与回调函数的区别:就是ST将中断封装,给使用者的API,就是标准库的中断函数 对普通函数的调用: 调用程序发出对普通函数的调用后,程序执行立即转向被调用函数执行,直到被调用函数执行完毕后,再返 ...
- STM32 HAL库学习系列第1篇 ADC配置 及 DAC配置
ADC工作均为非阻塞状态 轮询模式 中断模式 DMA模式 库函数: HAL_StatusTypeDef HAL_ADC_Start(ADC_HandleTypeDef* hadc);//轮询模式,需放 ...
- STM32 HAL库学习系列第6篇---定时器TIM 级联配置
应用情景 使用定时器配置编码器模式,发现STM32只有两个定时器是32位,16位的测量值不够用,发现是可以使用两个16位定时器级联为32位的. 我是在使用编码器计数电机转速时使用,但是最终实现的效果不 ...
- STM32 HAL库学习系列第5篇 定时器TIM---编码器接口模式配置
cube基本配置,外设开启编码器,串口2 可能大家在设置的时候有这个错误 错误:error: #20: identifier "TIM_ICPOLARITY_BOTHEDGE" ...
- STM32 HAL库学习系列第4篇 定时器TIM----- 开始定时器与PWM输出配置
基本流程: 1.配置定时器 2.开启定时器 3.动态改变pwm输出,改变值 HAL_TIM_PWM_Start(&htim4, TIM_CHANNEL_1); 函数总结: __HAL_TIM ...
- STM32 HAL库学习系列第3篇 常使用的几种延时方式
1 自带的hal_delay 函数 毫秒级延迟 void HAL_Delay(__IO uint32_t Delay) { uint32_t tickstart = HAL_GetTick( ...
- STM32 HAL库学习系列第2篇 GPIO配置
GPIO 库函数 基本就是使用以下几个函数 GPIO_PinState HAL_GPIO_ReadPin(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin); void H ...
- STM32 HAL库学习系列第7篇---定时器TIM 输入捕获功能
测量脉冲宽度或者测量频率 基本方法 1.设置TIM2 CH1为输入捕获功能: 2.设置上升沿捕获: 3.使能TIM2 CH1捕获功能: 4.捕获到上升沿后,存入capture_buf[0], ...
- STM32 HAL库学习系列---定时器TIM 输入捕获功能
基本方法 1.设置TIM2 CH1为输入捕获功能: 2.设置上升沿捕获: 3.使能TIM2 CH1捕获功能: 4.捕获到上升沿后,存入capture_buf[0],改为捕获下降沿: 5.捕获到下降沿后 ...
- 【书籍连载】《STM32 HAL 库开发实战指南—基于F7》-第一章
从今天起,每天开始连载一章<STM32 HAL 库开发实战指南—基于F7>.欢迎各位阅读.点评.学习. 第1章 如何使用本书 1.1 本书的参考资料 本书参考资料为:<STM32 ...
随机推荐
- python基础篇 15-常用模块:random string sorted lambda函数
一.random import os,random,sys,time,string print(random.randint(1,10)) # 产生随机的整数 print(random.uniform ...
- 流量运营(pvuv跳出率漏斗abtest)
AARRR模型 1. 激活: 拉新,对用户来源渠道进行分析,哪些合作.投放渠道对我们产品更合适 2. 注册: 流量激活之后,如果用户只是点进来就走了,也没什么用,合适的产品功能切合用户需求,才会有转化 ...
- Jmeter八、关联
关联的方式:1.正则2.Xpath 后置 处理器→正则表达式提取器 正则表达式:(.*) 模板$1$ 匹配数字:0代表随机,-1代表所有 缺省值为空即可
- CAD2023卸载方法,如何完全彻底卸载删除清理干净cad各种残留注册表和文件?【转载】
cad2023卸载重新安装方法,使用清理卸载工具箱完全彻底删除干净cad2023各种残留注册表和文件.cad2023显示已安装或者报错出现提示安装未完成某些产品无法安装的问题,怎么完全彻底删除清理干净 ...
- Mybatis-plus的自定义分页搭配sql Server数据库使用
原文出处:mybatisplus查询分页并且排序报错解决方法,适用于自定义sql和sqlserver_十七梦的博客-CSDN博客 一开始使用过的是官方文档来写分页,结果出现了如果不在最后添加ORDER ...
- 关于Python文件读取时,默认把\r\n换成\n
Python在非二进制形式读取文件时,自动把\r\n换成\n.(window下换行是\r\n) 建立一个test1.txt文件, aaaa bbbb 1.在utf8方式下读取 读取四个字符 1 f=o ...
- obj文件格式解读
学习了很长一段时间的建模,obj文件一直都在使用,但是却很少去研究过,只是知道这是软件之间的通用格式,直到最近因为刚好要在python中加载obj文件,才发现原来obj文件是如此的有规律 随便用记事本 ...
- DNS解析原理(www.baidu.com)
QueryDns,py程序运行问题解决 关于远程访问数据库问题 这个我用NAVICAT或者是python程序连接都连不上他那个数据库(可能是数据库设定的权限没有开启?) 这个程序真的跑不起来,考虑自己 ...
- Q:oracle 日期筛选
一.oracle where条件日期筛选 两种方法:tochar和todate todate:将字符串按照指定的格式输出,得到的是日期类型. to_date('2019-12-01','yyyy-MM ...
- 在为 DataGridView 添加数据列时,弹出 将要添加的列 CellType 属性为空 错误提示与说明
事务:为 DataGridView 添加数据列[也可以说是直接操作 DataGridView 数据列...]... 原由:在为 DataGridView 添加列的时候,[至少这是第三次遇到] 弹出 添 ...