Surf算法特征点检测与匹配
Speeded Up Robust Features(SURF,加速稳健特征),是一种稳健的局部特征点检测和描述算法。最初由Herbert Bay发表在2006年的欧洲计算机视觉国际会议(Europen Conference on Computer Vision,ECCV)上,并在2008年正式发表在Computer Vision and Image Understanding期刊上。
Surf是对David Lowe在1999年提出的Sift算法的改进,提升了算法的执行效率,为算法在实时计算机视觉系统中应用提供了可能。与Sift算法一样,Surf算法的基本路程可以分为三大部分:局部特征点的提取、特征点的描述、特征点的匹配。
但Surf在执行效率上有两大制胜法宝——一个是积分图在Hessian(黑塞矩阵)上的使用,一个是降维的特征描述子的使用。了解这两大法宝是如何出奇制胜前,先回顾一下传统Sift算法的基本思路及其优缺点。
Sift是一种基于尺度空间的,对图像缩放、旋转、甚至仿射变换保持不变性的图像局部特征描述算子。
一、特征点提取
Sift的特征点是在DOG金字塔尺度空间中提取的,尺度空间的构建涉及到高斯卷积、图像下采样和高斯差分操作。在尺度空间中先初步提取出在尺度空间和二维图像空间上都是局部极值点的兴趣点,再滤除掉能量低的不稳定的和错误的兴趣点,得到最终稳定的特征点。
二、特征点描述
特征点描述包括特征点方向分配和128维向量描述两个步骤。
特征的的方向分配:Sift求取特征点周围邻域内所有像素的梯度方向,生成梯度方向直方图,并归一化为0~360°的梯度方向直方图到36个方向内,取梯度直方图的主要分量所代表的方向作为特征点的方向。
128维向量描述:这个仍然是基于梯度方向直方图展开的,去特征点周围邻域4*4个快,每块提取出8个梯度方向,共计128个方向作为特征的描述子。
三、特征点的匹配
特征点的匹配是通过计算两组特征点的128维的特征点的欧氏距离实现的。欧氏距离越小,则相似度越高,当欧式距离小于设定阈值时,可以判定为匹配成功。
Sift算法的优点是特征稳定,对旋转、尺度变换、亮度保持不变性,对视角变换、噪声也有一定程度的稳定性;缺点是实时性不高,并且对于边缘光滑目标的特征点提取能力较弱。
Surf改进了特征的提取和描述方式,用一种更为高效的方式完成特征的提取和描述,具体实现流程如下:
1. 构建Hessian(黑塞矩阵),生成所有的兴趣点,用于特征的提取;
2. 构建尺度空间
3. 特征点定位
4. 特征点主方向分配
5. 生成特征点描述子
6. 特征点匹配
1. 构建Hessian(黑塞矩阵),生成所有的兴趣点,用于特征的提取;
构建Hessian矩阵的目的是为了生成图像稳定的边缘点(突变点),跟Canny、拉普拉斯边缘检测的作用类似(个人立即,欢迎拍砖),为下文的特征提取做好基础。构建Hessian矩阵的过程对应于Sift算法中的高斯卷积过程。
黑塞矩阵(Hessian Matrix)是一个多元函数的二阶偏导数构成的方阵,描述了函数的局部曲率。由德国数学家Ludwin Otto Hessian于19世纪提出。
对一个图像f(x,y),其Hessian矩阵如下:
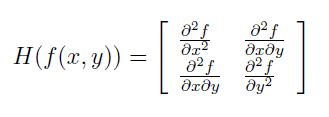
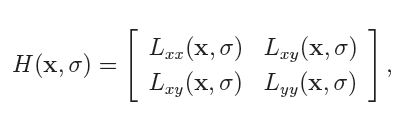
在构造Hessian矩阵前需要对图像进行高斯滤波,经过滤波后的Hessian矩阵表述为:
当Hessian矩阵的判别式取得局部极大值时,判定当前点是比周围邻域内其他点更亮或更暗的点,由此来定位关键点的位置。
我们知道在离散数字图像中,一阶导数是相邻像素的灰度差:

二阶导数是对一阶导数的再次求导:

反过来看Hessian矩阵的判别式,其实就是当前点对瓶方向二阶偏导乘以垂直方向的二阶偏导再减去当前点水平、垂直二阶偏导的二次方:

Hessian矩阵判别式中的f(x,y)是原始图像的高斯卷积,由于高斯核实服从正态分布的,从中心点往外,系数越来越低,为了提高运算速度,Surf使用了盒式滤波器来近似替代高斯滤波器,所以在Dxy上乘了一个加权系数0.9,目的是为了平衡因使用盒式滤波器近似所带来的误差:

高斯滤波器和盒式滤波器的示意图如下:
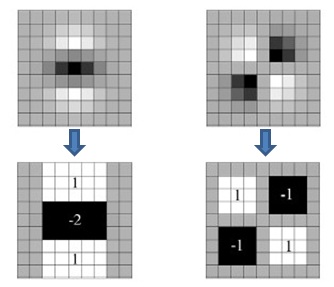
上边两幅图是9*9高斯滤波器模板分别在图像上垂直方向上二阶导数Dyy和Dxy对应的值,下边两幅图是使用盒式滤波器对其近似,灰色部分的像素值为0,黑色为-2,白色为1。
那么为什么盒式滤波器可以提高运算速度呢,这就涉及到积分图的使用。盒式滤波器对图像的滤波转化成计算图像上不同区域间像素和的加减运算问题,这正是积分图的强项,只需要简单几次查找积分图就可以完成。
2. 构建尺度空间
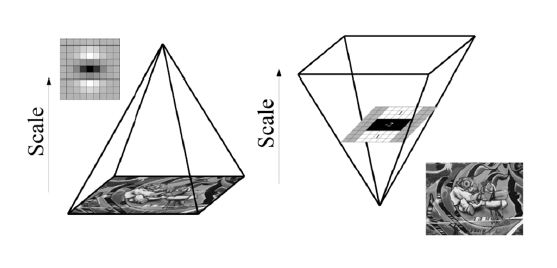
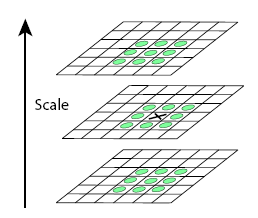
同Sift一样,Surf的尺度空间也是由O组L成组成,不同的是,Sift中下一组图像的尺寸是上一组的一半,同一组间图像尺寸一样,但是所使用的高斯模糊系数逐渐增大;而在Surf中,不同组间图像的尺寸都是一致的,不同的是不同组间使用的盒式滤波器的模板尺寸逐渐增大,同一组间不同层间使用相同尺寸的滤波器,但是滤波器的模糊系数逐渐增大,如下图所示:
3. 特征点定位
特征点的定位过程Surf和Sift保持一致,将经过Hessian矩阵处理的每个像素点与二维图像空间和尺度空间邻域内的26个点进行比较,初步定位出关键点,再经过滤除能量比较弱的关键点以及错误定位的关键点,筛选出最终的稳定的特征点。
4. 特征点主方向分配
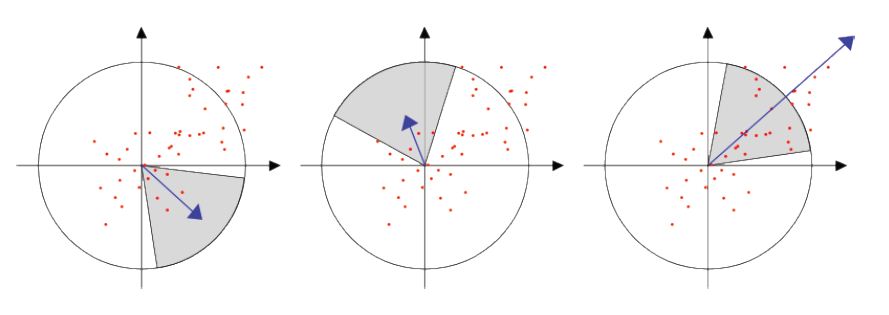
Sift特征点方向分配是采用在特征点邻域内统计其梯度直方图,取直方图bin值最大的以及超过最大bin值80%的那些方向作为特征点的主方向。而在Surf中,采用的是统计特征点圆形邻域内的harr小波特征。即在特征点的圆形邻域内,统计60度扇形内所有点的水平、垂直harr小波特征总和,然后扇形以0.2弧度大小的间隔进行旋转并再次统计该区域内harr小波特征值之后,最后将值最大的那个扇形的方向作为该特征点的主方向。该过程示意图如下:
5. 生成特征点描述子
在Sift中,是取特征点周围4*4个区域块,统计每小块内8个梯度方向,用着4*4*8=128维向量作为Sift特征的描述子。
Surf算法中,也是在特征点周围取一个4*4的矩形区域块,但是所取得矩形区域方向是沿着特征点的主方向。每个子区域统计25个像素的水平方向和垂直方向的haar小波特征,这里的水平和垂直方向都是相对主方向而言的。该haar小波特征为水平方向值之后、垂直方向值之后、水平方向绝对值之后以及垂直方向绝对值之和4个方向。该过程示意图如下:
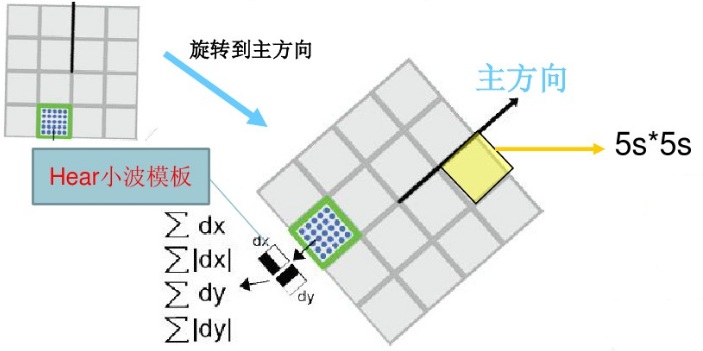
把这4个值作为每个子块区域的特征向量,所以一共有4*4*4=64维向量作为Surf特征的描述子,比Sift特征的描述子减少了2倍。
6. 特征点匹配
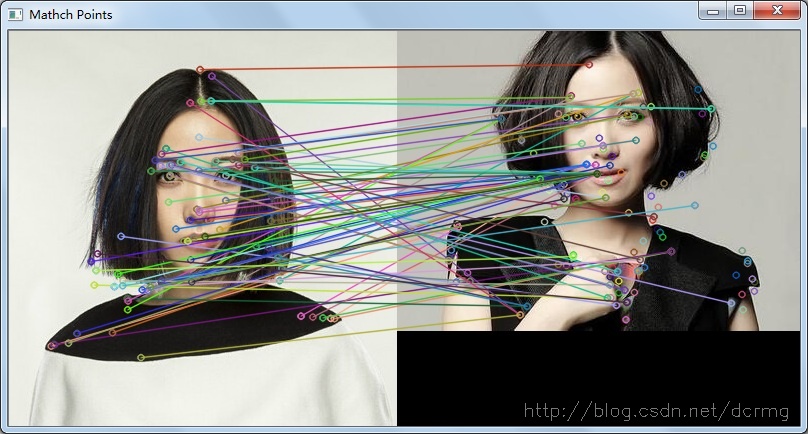
与Sift特征点匹配类似,Surf也是通过计算两个特征点间的欧式距离来确定匹配度,欧氏距离越短,代表两个特征点的匹配度越好。不同的是Surf还加入了Hessian矩阵迹的判断,如果两个特征点的矩阵迹正负号相同,代表这两个特征具有相同方向上的对比度变化,如果不同,说明这两个特征点的对比度变化方向是相反的,即使欧氏距离为0,页直接予以排除。
匹配结果:
参考资料: SURF算法分析
Surf算法特征点检测与匹配的更多相关文章
- 使用OpenCV对图片进行特征点检测和匹配(C++)
背景 最近从不同网站下载了非常多的动漫壁纸,其中有一些内容相同,但是大小.背景颜色.色调.主人公的位置不同(例子如下).正因为如此,基础的均方误差.直方图检测等方法很难识别出这些相似的图片. 思路 O ...
- SIFT特征点检测与匹配
SIFT的步骤如下: (1) 尺度空间极值检测(Scale-space Extrema Detection) 也就是在多尺度高斯差分(Difference of Gauss)空间中检测极值点(3x3x ...
- OpenCV计算机视觉学习(13)——图像特征点检测(Harris角点检测,sift算法)
如果需要处理的原图及代码,请移步小编的GitHub地址 传送门:请点击我 如果点击有误:https://github.com/LeBron-Jian/ComputerVisionPractice 前言 ...
- 特征点检测学习_2(surf算法)
依旧转载自作者:tornadomeet 出处:http://www.cnblogs.com/tornadomeet 特征点检测学习_2(surf算法) 在上篇博客特征点检测学习_1(sift算法) 中 ...
- OPENCV图像特征点检测与FAST检测算法
前面描述角点检测的时候说到,角点其实也是一种图像特征点,对于一张图像来说,特征点分为三种形式包括边缘,焦点和斑点,在OPENCV中,加上角点检测,总共提供了以下的图像特征点检测方法 FAST SURF ...
- OpenCV特征点检测匹配图像-----添加包围盒
最终效果: 其实这个小功能非常有用,甚至加上只有给人感觉好像人脸检测,目标检测直接成了demo了,主要代码如下: // localize the object std::vector<Point ...
- OpenCV特征点检测算法对比
识别算法概述: SIFT/SURF基于灰度图, 一.首先建立图像金字塔,形成三维的图像空间,通过Hessian矩阵获取每一层的局部极大值,然后进行在极值点周围26个点进行NMS,从而得到粗略的特征点, ...
- OpenCV特征点检测------Surf(特征点篇)
Surf(Speed Up Robust Feature) Surf算法的原理 ...
- opencv学习之路(35)、SURF特征点提取与匹配(三)
一.简介 二.opencv中的SURF算法接口 三.特征点匹配方法 四.代码 1.特征点提取 #include "opencv2/opencv.hpp" #include < ...
随机推荐
- 微信小程序实现tab页面切换功能
wxml <scroll-view scroll-x="true" class="ip_tab_comtainer"> <view class ...
- 优秀Java程序员必备10招
1. 拥有扎实的基础和深刻理解 OO 原则 对于 Java 程序员,深刻理解 ObjectOriented Programming(面向对象编程)这一概念是必须的.没有 OOPS 的坚实基础,就领会不 ...
- WEB安全实战(二)带你认识 XSS 攻击
前言 上一篇文章写了关于 WEB 安全方面的实战,主要是解决 SQL 盲注的安全漏洞.这篇文章本来是要写一篇关于怎样防治 XSS 攻击的,可是想来想去,还是决定先从理论上认识一下 XSS 吧.下一篇文 ...
- HDU 5389 Zero Escape (MUT#8 dp优化)
[题目链接]:pid=5389">click here~~ [题目大意]: 题意: 给出n个人的id,有两个门,每一个门有一个标号,我们记作a和b,如今我们要将n个人分成两组,进入两个 ...
- 10. Spring Boot JDBC 连接数据库
转自:https://blog.csdn.net/catoop/article/details/50507516
- Vue自定义组件
- 【例题 7-10 UVA - 11212】Editing a Book
[链接] 我是链接,点我呀:) [题意] 在这里输入题意 [题解] 迭代加深搜. 很容易想到,最多只要搜8层就可以得到答案了 ->最多8下肯定可以还原. 则枚举一下最大层数.然后做个深搜就好. ...
- POJ 3169 Layout (HDU 3592) 差分约束
http://poj.org/problem?id=3169 http://acm.hdu.edu.cn/showproblem.php?pid=3592 题目大意: 一些母牛按序号排成一条直线.有两 ...
- 【例题 6-4 UVA - 11988】Broken Keyboard (a.k.a. Beiju Text)
[链接] 我是链接,点我呀:) [题意] 在这里输入题意 [题解] 会链表的插入操作的话.这个就不难了. 放置两个哨兵节点. 然后模拟插入一个节点的过程就好. 实时修改光标就好->即下一个插入的 ...
- [Angular 2] Share Template Content In Another Template With Content Projection <ng-content>
Angular 1 provided a mechanism to place content from your template inside of another template called ...