m100(2) 云台自动跟踪
大疆 210云台控制 https://developer.dji.com/onboard-sdk/documentation/sample-doc/advanced-sensing-target-tracking.html


0 开启图像端
0.1 图像跟踪 http://www.cnblogs.com/kekeoutlook/p/8353357.html
图像鼠标选取目标,之后不断保存目标信息,存入共享内存
- 中心(x,y)和长宽
- 发送标志位1判断是否
工程
0.2 共享内存获取和存数据
http://www.cnblogs.com/kekeoutlook/p/8330336.html
1原有速度和角度控制模式


最终执行了 函数
函数
修改控制云台发送速率 为20HZ
cameraSend = new QTimer();
cameraSend->setInterval(50); // 20Hz
connect(cameraSend, SIGNAL(timeout()), this, SLOT(on_tmr_Camera_autosend()));
修改共享内存读取速度
connect(timerBroadcast, SIGNAL(timeout()), this, SLOT(on_tmr_Broadcast()));
timerBroadcast->start(50);// 共享内存接收数据的频率 原有300 改为 50 -20HZ
2像素差值控制速度调整云台

10个像素 - 1角度
2.1云台初始化
void DJIonboardSDK::on_tmr_Broadcast()
{
//! @note this function cost too much time to run.
//! it is better run outside the broadcastCallback.
/*读取共享内存数据*/ memcpy(&recBOX, recBOX_DATA, sizeof(TrackBox)); qDebug("flag= %d ", recBOX.flag);
qDebug("old_flag= %d ", old_flag);
if (old_flag == 0 && recBOX.flag == 1)
{
firstflag = 1;
}
else
{
firstflag = 0;
}
//qDebug("firtflag= %d ", firstflag);
//qDebug(" %f ", cam->getYaw());
old_flag = recBOX.flag; if (recBOX.flag != 0)
{
//qDebug(" %d ", recBOX.flag);
itarget_x = recBOX.x;// 中心
//qDebug("target_x:%d ", recBOX.x);
itarget_y = recBOX.y;
//qDebug("target_x:%d target_y:%d", recBOX.x, recBOX.y);
itarget_h = recBOX.height;
itarget_w = recBOX.width; // img_w,
// img_h; // waitKey(1);
}
else { itarget_x = 1920 / 2;// 中心
//qDebug("Test:%d", recBOX.x);
itarget_y = 1080 / 2;
//qDebug("Test:%d", recBOX.y);
qDebug("target_x:%d target_y:%d", itarget_x, itarget_y);
}
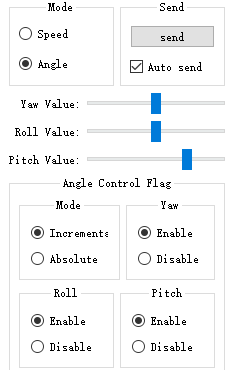
2.2云台速度限制
void DJIonboardSDK::on_btr_camera_speed_clicked()
{
ui->hs_camera_yaw->setMinimum(-1800);
ui->hs_camera_yaw->setMaximum(1800);
ui->hs_camera_roll->setMinimum(-1800);
ui->hs_camera_roll->setMaximum(1800);
ui->hs_camera_pitch->setMinimum(-1800);
ui->hs_camera_pitch->setMaximum(1800);
resetCameraAngle();
ui->gb_cameraFlag->setEnabled(false);
}
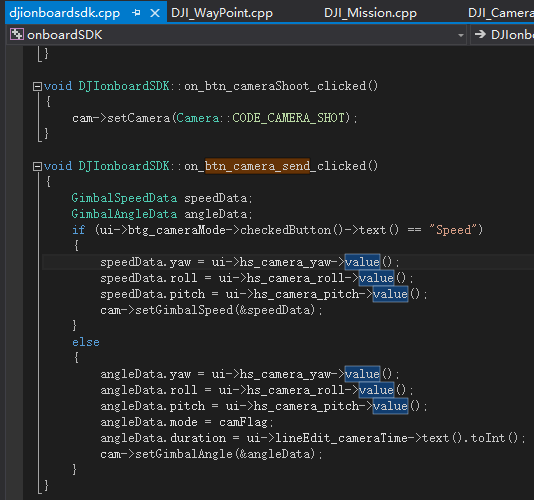
2.3速度云台控制 10个像素转化每秒一度
void DJIonboardSDK::on_btn_camera_send_clicked()
{
GimbalSpeedData speedData;
GimbalAngleData angleData; if (ui->btg_cameraMode->checkedButton()->text() == "Speed")
{ //int itarget_x, itarget_y, itarget_h, itarget_w;
//int img_w, img_h;
int dx = 0;
int dy = 0;
int yawRate = 0;
int pitchRate = 0; //dx = (int)(itarget_x + itarget_w / 2 - img_w / 2);
//dy = (int)(itarget_y + itarget_h / 2 - img_h / 2); dx = (int)(itarget_x - 1920 / 2);
dy = (int)(itarget_y - 1080 / 2); yawRate = dx;
pitchRate = -dy; if (itarget_w / 2 < 30) { itarget_w = 60; };
if (itarget_h / 2 < 30){ itarget_h = 60; }; if (abs(dx) < itarget_w/2)
{
yawRate = 0;
}
if (abs(dy) < itarget_h/2)
{
pitchRate = 0;
} speedData.yaw = yawRate;
speedData.roll = 0;
speedData.pitch = pitchRate; cam->setGimbalSpeed(&speedData); }
else
{
angleData.yaw = ui->hs_camera_yaw->value();// 每次+5 --0.5
angleData.roll = ui->hs_camera_roll->value();
angleData.pitch = ui->hs_camera_pitch->value();
angleData.mode = camFlag;
angleData.duration = ui->lineEdit_cameraTime->text().toInt();
cam->setGimbalAngle(&angleData);
} }
2.4 加入PID调参的速度控制策略
PID初始化
DJIonboardSDK::DJIonboardSDK(QWidget *parent) : QMainWindow(parent), ui(new Ui::DJIonboardSDK)
{
ui->setupUi(this); ui->btn_flightCheckStatus->setVisible(false);
ui->btn_waypointDownload->setVisible(false);
ui->btn_waypoint_reset->setVisible(false);
ui->tabWidget->removeTab(3); PID_X.reset();
PID_Y.reset();
PID_X.setParam(0.44, 0.06, 0.007, 0);
PID_Y.setParam(0.6, 0.05, 0.02, 0);
//不过冲,但速度慢
//PID_X.setParam(0.4, 0.04, 0.03, 0);
//PID_Y.setParam(0.5, 0.05, 0.02, 0);
initSDK();
initDisplay();
initFlight();
initCamera();
initFollow();
initWayPoint();
initVirtualRC();
initShareMemory();
取数据
connect(timerBroadcast, SIGNAL(timeout()), this, SLOT(on_tmr_Broadcast()));
timerBroadcast->start(20);// 共享内存接收数据的频率 原有300 改为 50HZ
3 像素控制 像素差转化为角度增量
X3相机
视场角度 W 73.9度 H 53度
图像分辨率 1920 * 1080
- 问题 int/float 型 引发 0的问题

选择Increments 会在原来的基础之上angleData.yaw, angleData.roll,angleData.pitch 增加差量大小
- angleData.yaw = yawRate * 793 / 1920;// 横向 像素差---角度
angleData.roll = 0;
angleData.pitch = pitchRate * 500 / 1080 ; // 纵向 像素差---角度
选择Absolute 会绝对控制 直接将angleData.yaw, angleData.roll,angleData.pitch设置成差量大小
3.1 设置角度范围
void DJIonboardSDK::on_btr_camera_angle_clicked()
{
ui->hs_camera_yaw->setMinimum(-3200);
ui->hs_camera_yaw->setMaximum(3200);
ui->hs_camera_roll->setMinimum(-350);
ui->hs_camera_roll->setMaximum(350);
ui->hs_camera_pitch->setMinimum(-900);
ui->hs_camera_pitch->setMaximum(300);
ui->gb_cameraFlag->setEnabled(true);
resetCameraAngle();
}
3.2 控制策略
void DJIonboardSDK::on_btn_camera_send_clicked()
{
GimbalSpeedData speedData;
GimbalAngleData angleData; if (ui->btg_cameraMode->checkedButton()->text() == "Speed")
{ //int itarget_x, itarget_y, itarget_h, itarget_w;
//int img_w, img_h; }
else
{ int yawRate = 0;
int pitchRate = 0;
// 坐标为左上角坐标
//dx = (int)(itarget_x + itarget_w / 2 - img_w / 2);
//dy = (int)(itarget_y + itarget_h / 2 - img_h / 2);
//qDebug("x= %d ,y=%d", itarget_x, itarget_y); //坐标为中心坐标
dx = (int)(itarget_x - 1920 / 2);
dy = (int)(itarget_y - 1080 / 2); yawRate = dx;
pitchRate = -dy; angleData.yaw = yawRate * 793 / 1920;// 横向 像素差---角度
angleData.roll = 0;
angleData.pitch = pitchRate * 500 / 1080 ; // 纵向 像素差---角度 angleData.mode = camFlag;
angleData.duration = ui->lineEdit_cameraTime->text().toInt();
cam->setGimbalAngle(&angleData);
} }
m100(2) 云台自动跟踪的更多相关文章
- M100 X3云台安装
http://bbs.dji.com/thread-38587-1-1.html
- 大疆无人机M100相关问题解决过程
1.遥控器升级问题 iOS端使用app升级,重复尝试了5次+,还是无法升级.卸载app重新安装,依旧是无法升级.使用Android app升级,一次搞定. 2.飞行器固件升级(云台别选错了) http ...
- M100 (0)开发
[SDCC 2015现场]大疆Paul Yang:多旋翼飞行器的未来就是机器人的未来 http://www.csdn.net/article/2015-11-19/2826268 开发官网 https ...
- PID控制本版一 (M100可用)
版本1 云台+无人机 https://en.wikipedia.org/wiki/PID_controller https://github.com/tekdemo/MiniPID 详细讲解 PIDC ...
- Z30云台PC控制问题
https://developer.dji.com/cn/onboard-sdk/ 我们的需求: 完成PC程序控制Z30相机云台 关键问题: 前提:遥控器控制飞机+图像观看+调焦 1 PC能够接收到图 ...
- M100 (1) 运行
软件环境设置指南 本指南详细介绍了使用Onboard SDK所需的软件环境. https://developer.dji.com/onboard-sdk/documentation/developme ...
- 大疆OSMO口袋云台相机惊艳上市!友商该如何是好。。。
2018.11.29 晚上更新: 下午看了大疆新出的口袋云台摄像机,感觉棒极了,于是我立刻去了京东下单预订了.目前是可以免息分期6个月就可以搞定了.‘ 大家敬请期待我的评测视频吧. ======== ...
- M100(3) 无线数传
本文记录了无线数传配合地面Windos qt写的飞机控制SDK软件的使用过程 使用了两种类型无线数传 遇到问题 1 界面卡死问题 1.1 数传问题 问题描述: 使用非官方数传,点击active按键和一 ...
- Qt自定义控件大全(一)云台仪表盘控件
做过安防视频监控的同学都清楚,在视频监控系统软件上都可以看到一个云台控制区域,可以对球机进行下下左右等八个方位的运动控制,还可以进行复位,一般都是美工作图好,然后贴图的形式加入到软件中,好处是程序简单 ...
随机推荐
- vuex学习及使用
什么是vuex? 在SPA单页面组件的开发中vuex称为状态管理:简单的理解就是你在state中定义了一个数据之后,你可以在所在项目中的任何一个组件里进行获取.进行修改,并且你的修改可以得到全局的响应 ...
- .net敏捷开发框架 力软(learun) 让开发变的更简单
版本:6.1.6.2 体验地址:www.fishcmonkey.com 联系QQ:6539471
- T-SQL :TOP和OFFSET-FETCH筛选 (五)
通过were和having条件可以对数据进行筛选,那么如何通过排序对数据进行筛选呢? 1.TOP筛选 用于限制查询返回行数或者行数的百分比. 例如 我们对订单表筛选最近产生的订单5条 ) orderi ...
- C# 语句 分支语句 switch----case----.
第二种分支语句 switch..case. switch(一个变量){ case 值:要执行的代码段;break; case 值:要执行的代码段;break; ... ... ... default ...
- [android] 手机卫士绑定sim卡
更新: 收不到启动广播,查看知乎,好像是说高版本的系统都禁止了 还可以通过adb发送开机广播 adb shell am broadcast -a android.intent.action.BOOT_ ...
- 【Java】用注解实现分发器
在C/S中,客户端会向服务器发出各种请求,而服务器就要根据请求做出对应的响应.实际上就是客户机上执行某一个方法,将方法返回值,通过字节流的方式传输给服务器,服务器找到该请求对应的响应方法,并执行,将结 ...
- The Maze Makers(csu1566)
1566: The Maze Makers Time Limit: 1 Sec Memory Limit: 128 MBSubmit: 90 Solved: 33[Submit][Status][ ...
- lnmp首次安装重置mysql密码
第一种方法:一键修改LNMP环境下MYSQL数据库密码脚本 一键脚本肯定是非常方便.具体执行以下命令: wget http://soft.vpser.net/lnmp/ext/reset_mysql_ ...
- selenium win7+selenium2.0+python环境搭建
win7+selenium2.0+python环境搭建 by:授客 QQ:1033553122 步骤1:下载python 担心最新版的支持不太好,这里我下载的是python 2.7(selenium之 ...
- loadrunner 脚本开发-参数化之将内容保存为参数、参数数组及参数值获取Part 2
脚本开发-参数化之将内容保存为参数.参数数组及参数值获取 by:授客 QQ:1033553122 ----------------接 Part 1--------------- 把内容保存到参数数组 ...