软件篇-04-OMPL和FCL用于SLAM轨迹规划
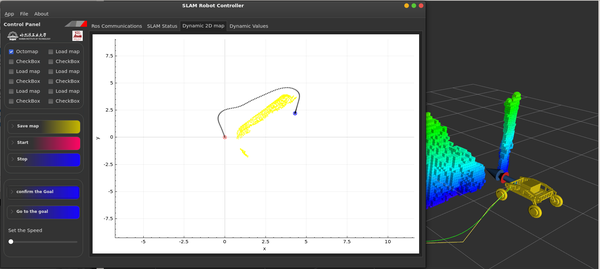
使用OMPL内置的infoRRTstar算法模块和FCL碰撞检测库实现当前点和目标点的轨迹规划,
- 效果图
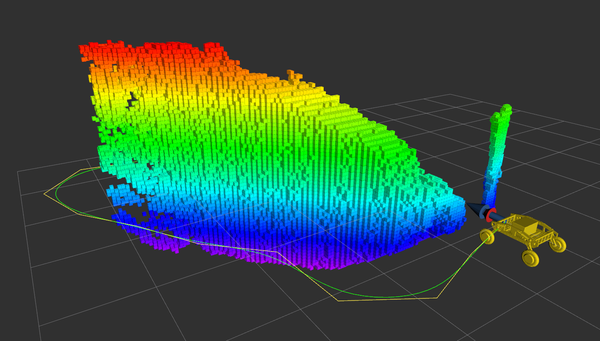
- 将pointcloud点云转化为OctoMap,用于碰撞检测
- // turn the pcl cloud to fcl::CollisionGeometry after octree
- // updtae the octomap
- octomap::OcTree* treeOctomapPtr = new octomap::OcTree( 0.05 );
for(auto p:pclCloud->points) {
if(p.z > groundHeightMax + carTF_zed2.pose.position.z) treeOctomapPtr->updateNode
( octomap::point3d(p.x, p.y, p.z), true );
}
treeOctomapPtr->updateInnerOccupancy();
fcl::OcTree<float>* tree = new fcl::OcTree<float>(std::shared_ptr<const octomap::OcTree>(treeOctomapPtr));
tree_obj = std::shared_ptr<fcl::CollisionGeometry<float>>(tree);
- 设置OMPL轨迹规划限制空间
- // set the bounds for the R^3 part of SE(3)
- ompl::base::RealVectorBounds bounds(3);
- // set X-Y-Z dimensions bound
- bounds.setLow(0,bounds_lmin);
- bounds.setHigh(0,bounds_lmax);
- bounds.setLow(1,bounds_wmin);
- bounds.setHigh(1,bounds_wmax);
- bounds.setLow(2,bounds_hmin);
- bounds.setHigh(2,bounds_hmax);
- 使用FCL检测当前状态是否碰撞
- bool Navigation::isStateValid(const ompl::base::State *state)
{
// cast the abstract state type to the type we expect const ompl::base::SE3StateSpace::StateType *se3state = state->as<ompl::base::SE3StateSpace::StateType>();
// extract the first component of the state and cast it to what we expect const ompl::base::RealVectorStateSpace::StateType *pos = se3state->as<ompl::base::RealVectorStateSpace::StateType>(0); // extract the second component of the state and cast it to what we expect const ompl::base::SO3StateSpace::StateType *rot = se3state->as<ompl::base::SO3StateSpace::StateType>(1); fcl::CollisionObject<float> treeObj((tree_obj)); fcl::CollisionObject<float> slamCarObject(slamCar); // check validity of state defined by pos & rot fcl::Vector3f translation(pos->values[0],pos->values[1],pos->values[2]); fcl::Quaternionf rotation(rot->w, rot->x, rot->y, rot->z); slamCarObject.setTransform(rotation, translation); fcl::CollisionRequest<float>requestType(1,false,1,false); fcl::CollisionResult<float> collisionResult; fcl::collide(&slamCarObject,&treeObj, requestType, collisionResult);return(!collisionResult.isCollision());}- 在下面的代码将FCL和OMPL相联系,这里的 "std::placeholders::_1"是一个占位符。
- si = ompl::base::SpaceInformationPtr(new ompl::base::SpaceInformation(space));
si->setStateValidityChecker(std::bind(&Navigation::isStateValid, this, std::placeholders::_1 ));
- 一切设置好后就可以开始计算路径了
- ompl::base::PlannerStatus solved;
try
{
solved = plan->solve(rrtSolutionTimeLimit);
}
catch(ompl::Exception e)
{
ROS_WARN("Error occourred: %s", e.what());
}
- ompl::geometric::PathSimplifier* pathBSpline = new ompl::geometric::PathSimplifier(si);
path_smooth = new ompl::geometric::PathGeometric(dynamic_cast<const ompl::geometric::PathGeometric&>(*pdef->getSolutionPath()));
pathBSpline->smoothBSpline(*path_smooth,3);
// ROS_INFO("Smoothed Path:"); // path_smooth->print(std::cout); smooth_msg.header.stamp = ros::Time::now(); smooth_msg.header.frame_id = "map"; for (std::size_t idx = 0; idx < path_smooth->getStateCount (); idx++) { // cast the abstract state type to the type we expect const ompl::base::SE3StateSpace::StateType *se3state = path_smooth->getState(idx)->as<ompl::base::SE3StateSpace::StateType>(); // extract the first component of the state and cast it to what we expect const ompl::base::RealVectorStateSpace::StateType *pos = se3state->as<ompl::base::RealVectorStateSpace::StateType>(0); // extract the second component of the state and cast it to what we expect const ompl::base::SO3StateSpace::StateType *rot = se3state->as<ompl::base::SO3StateSpace::StateType>(1); geometry_msgs::PoseStamped point; point.pose.position.x = pos->values[0]; point.pose.position.y = pos->values[1]; point.pose.position.z = pos->values[2]; point.pose.orientation.x = rot->x; point.pose.orientation.y = rot->y; point.pose.orientation.z = rot->z; point.pose.orientation.w = rot->w; smooth_msg.poses.push_back(point);}
软件篇-04-OMPL和FCL用于SLAM轨迹规划的更多相关文章
- 软件篇-03-基于ORB_SLAM2手写SLAM稠密地图构建实现
本文使用的方法不是从内部修改ORBSLAM2源码以获取稠密点云,而是先从ZED2 sdk获取以摄像头坐标系为描述的三维点云/作为点云地图的一个子集,然后融合IMU与ORB_SLAM2进行实时定位,通过 ...
- 软件篇-05-融合ORB_SLAM2和IMU闭环控制SLAM底盘运动轨迹
前面我们已经得到了当前底盘在世界坐标系中的位姿,这个位姿是通过融合ORB_SLAM2位姿和IMU积分得到的,在当前位姿已知的case下,给SLAM小车设置一个goal,我这里是通过上位机设置,然后 ...
- GSM Sniffing入门之软件篇:GSMTAP抓取与SMS(Short Message Service)
重点介绍如何利用50元左右的设备,抓包并还原SMS短信内容: ps:研究GSM Sniffing纯属个人兴趣,能抓SMS报文只是捡了个明文传输的漏子,切勿用于非法用途.就像sylvain说的,osmo ...
- [知乎]老狼:深入PCI与PCIe之二:软件篇
深入PCI与PCIe之二:软件篇 https://zhuanlan.zhihu.com/p/26244141 我们前一篇文章(深入PCI与PCIe之一:硬件篇 - 知乎专栏)介绍了PCI和PCIe的硬 ...
- OA办公软件篇(一)—组织架构
OA办公软件篇(一)-组织架构 背景 作用 迭代历程 具体实现 写在最后 背景 在说组织架构之前,我们先来说说OA本身. 百度百科解释OA为:办公自动化(Office Automation,简称O ...
- OA办公软件篇(三)—审批流
背景 作用 迭代历程 具体实现 写在最后 背景 在前面两篇文章中,我们分别讲了组织架构和权限管理,今天我们来讲一个跟组织架构关系比较密切的功能-审批流. 审批流,通俗来说就是一个完整的审批流程,是 ...
- iOS系列 基础篇 04 探究视图生命周期
iOS系列 基础篇 04 探究视图生命周期 视图是应用的一个重要的组成部份,功能的实现与其息息相关,而视图控制器控制着视图,其重要性在整个应用中不言而喻. 以视图的四种状态为基础,我们来系统了解一下视 ...
- 智能家居-3.基于esp8266的语音控制系统(软件篇)
智能家居-1.基于esp8266的语音控制系统(开篇) 智能家居-2.基于esp8266的语音控制系统(硬件篇) 智能家居-3.基于esp8266的语音控制系统(软件篇) 赞赏支持 QQ:505645 ...
- OA办公软件篇(二)—权限管理
权限管理的背景 权限管理的作用 迭代历程 关键名词释义 权限管理模型 具体实现 写在最后 权限管理的背景 在OA办公软件篇(一)-组织架构一文中,我们说到组织架构是软件系统的权限体系的重要搭建依据 ...
随机推荐
- 设计模式之简单工厂模式(Simple Factory Pattern)
一.简单工厂模式的由来 所有设计模式都是为解决某类问题而产生的,那么简单工厂模式是为解决什么问题呢?我们假设有以下业务场景: 在一个学生选课系统中,文科生用户选课时,我们要获得文科生的所有课程列表:理 ...
- SpringBoot启动流程原理解析(二)
在上一章我们分析了SpingBoot启动流程中实例化SpingApplication的过程. return new SpringApplication(primarySources).run(args ...
- MyBatis(一):JDBC使用存在的问题
JDBC使用步骤: a:加载 JDBC 驱动程序 b:创建数据库的连接对象Connection c:根据链接获取Statement d:拼接SQL语句及设置参数 e:执行SQL并获取结果集 f:关闭使 ...
- Java中的名称命名规范:
Java中的名称命名规范:(不遵守,也不会出现编译的错误) 包名:多单词组成时所有字母都小写:xxxyyyzzz 类名.接口名:多单词组成时,所有单词的首字母大写:XxxYyyZzz 变量名.方法名: ...
- python常用数据处理库
Python之所以能够成为数据分析与挖掘领域的最佳语言,是有其独特的优势的.因为他有很多这个领域相关的库可以用,而且很好用,比如Numpy.SciPy.Matploglib.Pandas.Scikit ...
- 走进docker-初识
什么是Docker容器? 容器是打包代码及其所有依赖项的软件的标准单元,因此应用程序可以从一个计算环境快速可靠地运行到另一个计算环境.Docker容器映像是一个轻量级的,独立的,可执行的软件软件包,其 ...
- Reverse 高校网络信息安全运维挑战赛
Reverse 高校网络信息安全运维挑战赛 1 signed int sub_403CC0() 2 { 3 unsigned int v0; // eax 4 int key_lens; // eax ...
- (4)MySQL进阶篇SQL优化(常用SQL的优化)
1.概述 前面我们介绍了MySQL中怎么样通过索引来优化查询.日常开发中,除了使用查询外,我们还会使用一些其他的常用SQL,比如 INSERT.GROUP BY等.对于这些SQL语句,我们该怎么样进行 ...
- SSM-员工管理项目实战-CRUD-增删改查
SSM-CRUD 一.项目简介 主界面演示 功能点 分页 数据校验 ajax Rest 风格的 URI 技术点 基础框架 - ssm(Spring + SpringMVC + MyBatis) 数据库 ...
- 我的开源GIS解决方案之路
好久没更新了,因为我在--憋--大--招--,对,就是今天这篇. 今天跟大家分享一下我的开源GIS解决方案经历. --额-- 考虑到单聊技术解决方案你可能会很快睡着,所以我今天会把重点放在我封装地图A ...