OpenCV——SIFT特征检测与匹配
SIFT特征和SURF特征比较
| 比较项目 | SIFT | SURF |
|---|---|---|
| 尺度空间极值检测 | 使用高斯滤波器,根据不同尺度的高斯差(DOG)图像寻找局部极值 | 使用方形滤波器,利用海森矩阵的行列式值检测极值,并利用积分图加速运算 |
| 关键点定位 | 通过邻近信息插补来定位 | 与SIFT类似 |
| 方向定位 | 通过计算关键点局部邻域的方向直方图,寻找直方图中最大值的方向作为关键点的主方向 | 通过计算特征点周围像素点x,y方向的哈尔小波变换,将x、y方向小波变换的和向量的最大值作为特征点方向 |
| 特征描述子 | 是关键点邻域高斯图像梯度方向直方图统计结果的一种表示,是16*8=128维向量 | 是关键点邻域2D离散小波变换响应的一种表示,是16*4=64维向量 |
| 应用中的主要区别 | 通常在搜索正确的特征时更加精确,当然也更加耗时 | 描述子大部分基于强度的差值,计算更快捷 |
SIFT特征基本介绍
SIFT(Scale-Invariant Feature Transform)特征检测关键特征:
建立尺度空间,寻找极值
关键点定位(寻找关键点准确位置与删除弱边缘)
关键点方向指定
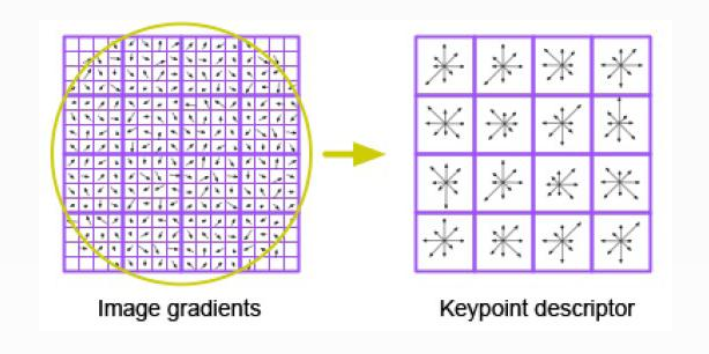
关键点描述子
建立尺度空间,寻找极值
工作原理
构建图像高斯金字塔,求取DOG,发现最大与最小值在每一级
构建的高斯金字塔,每一层根据sigma的值不同,可以分为几个待级,最少有4个。
关键点定位
我们在像素级别获得了极值点的位置,但是更准确的值应该在亚像素位置,如何得到--这个过程称为关键点(准确/精确)定位。
删除弱边缘--通过Hassian矩阵特征值实现,小于阈值自动舍弃。
关键点方向指定
求得每一层对应图像的梯度,根据给定的窗口大小
计算每个高斯权重,sigma=scale*1.5, 0-360之间建立36个直方图Bins
找最高峰对应的Bin,大于max*80%的都保留
这样就实现了旋转不变性,提高了匹配时候的稳定性
大约有15%的关键点会有多个方向
关键点描述子
拟合多项式插值寻找最大Peak
得到描述子 = 4*4*8=128
构造函数
cv::xfeatures2d::SIFT::create(
int nfeatures = 0,
int nOctaveLayers = 3, --高斯金字塔乘积数
double contrastThreshold = 0.04, --对比度
double edgeThreshold = 10, --边缘阈值,一般默认10就行
double sigma = 1.6
)
#include <opencv2/opencv.hpp>
#include <opencv2/xfeatures2d.hpp>
#include <iostream> using namespace cv;
using namespace cv::xfeatures2d;
using namespace std; int main(int argc, char** argv) {
Mat src = imread("test.jpg", IMREAD_GRAYSCALE);
if (src.empty()) {
printf("could not load image...\n");
return -;
}
namedWindow("input image", CV_WINDOW_AUTOSIZE);
imshow("input image", src); // SIFT特征点检测
int minHessian = ;
Ptr<SIFT> detector = SIFT::create(minHessian);//和surf的区别:只是SURF→SIFT
vector<KeyPoint> keypoints;
detector->detect(src, keypoints, Mat());//找出关键点 // 绘制关键点
Mat keypoint_img;
drawKeypoints(src, keypoints, keypoint_img, Scalar::all(-), DrawMatchesFlags::DEFAULT);
imshow("KeyPoints Image", keypoint_img); waitKey();
return ;
}
OpenCV——SIFT特征检测与匹配的更多相关文章
- OpenCV——Brisk特征检测、匹配与对象查找
检测并绘制特征点: #include <opencv2/opencv.hpp> #include <opencv2/xfeatures2d.hpp> #include < ...
- OpenCV——ORB特征检测与匹配
原文链接:https://mp.weixin.qq.com/s/S4b1OGjRWX1kktefyHAo8A #include <opencv2/opencv.hpp> #include ...
- OpenCV——SURF特征检测、匹配与对象查找
SURF原理详解:https://wenku.baidu.com/view/2f1e4d8ef705cc1754270945.html SURF算法工作原理 选择图像中的POI(Points of i ...
- opencv::sift特征提取
SIFT特征检测介绍 SIFT(Scale-Invariant Feature Transform)特征检测关键特性: -建立尺度空间,寻找极值 -关键点定位(寻找关键点准确位置与删除弱边缘) -关键 ...
- VS2010+Opencv+SIFT以及出现的问题-关于代码sift_3_c的说明
http://blog.sina.com.cn/s/blog_a6b913e30101dvrt.html 一.前提 安装Opencv,因该版本的SIFT是基于Opencv的. 下载SIFT源码,见Ro ...
- 使用Opencv中matchTemplate模板匹配方法跟踪移动目标
模板匹配是一种在图像中定位目标的方法,通过把输入图像在实际图像上逐像素点滑动,计算特征相似性,以此来判断当前滑块图像所在位置是目标图像的概率. 在Opencv中,模板匹配定义了6种相似性对比方式: C ...
- 《opencv学习》 之 特征检测与匹配
这几天学习SURF特征检测,直接看的视频和书本有点吃不消,现在是基本看懂了,如果写博客记录没有必要,因为网上都差不多,笔记都在书上了,以下是个人认为比较浅显易懂的文章,当然海有很多好文章我没看到. 看 ...
- Opencv Sift算子特征提取与匹配
SIFT算法的过程实质是在不同尺度空间上查找特征点(关键点),用128维方向向量的方式对特征点进行描述,最后通过对比描述向量实现目标匹配. 概括起来主要有三大步骤: 1.提取关键点: 2.对关键点附加 ...
- [opencv]KAZE、AKAZE特征检测、匹配与对象查找
AkAZE是KAZE的加速版 与SIFT,SUFR比较: 1.更加稳定 2.非线性尺度空间 3.AKAZE速度更加快 4.比较新的算法,只有Opencv新的版本才可以用 AKAZE局部匹配介绍 1.A ...
随机推荐
- 盐水的故事(hdu1408)
盐水的故事 Time Limit: 2000/1000 MS (Java/Others) Memory Limit: 65536/32768 K (Java/Others) Total Subm ...
- ssm中逆向工程与分页的应用
昨天对springboot中的mybatis逆向工程与分页应用进行了整理,今天对ssm项目中的逆向工程与分页进行整理. 项目运行环境:eclipse+jdk1.8+maven+tomcat 一.搭建s ...
- HDU4289(KB11-I 最小割)
Control Time Limit: 2000/1000 MS (Java/Others) Memory Limit: 32768/32768 K (Java/Others)Total Sub ...
- HDU1083(KB10-C 二分图最大匹配)
Courses Time Limit: 20000/10000 MS (Java/Others) Memory Limit: 65536/32768 K (Java/Others)Total S ...
- JS 对数组的操作集锦(基础)
下面内容是自己复习基础时候整理出来的,感谢缪雪峰老师的课程让自己可以有节奏的复习基础的东西! 以下内容颜色是重点关注,已经特别注意提醒,不是为了颜色好看噢,希望能帮到刚学习前端的朋友们,后续还会持续更 ...
- ionic 项目内部更新用到的插件,退出app插件
一 cordova-plugin-app-version插件 用来获取APP版本 ionic plugin add cordova-plugin-app-version -----cordova-p ...
- 数据库小组第N次小组会议
时间:5.30晚,9:30 ~ 11:30 主题:讨论android app与服务器之间数据同步的技术选型与实现 与会人:陈兆庭,黄志鹏,吴雪晴 讨论内容: 大体分析 关于数据同步,整体上有两部分,用 ...
- 数据库小组与UI小组第一次对接
时间:2018.6.1,21:30 ~ 23:00 人员:除黄志鹏外全体成员,因为黄志鹏临时有事 工作内容: 主要为数据库小组与UI第二组对接,并将成果汇总到github仓库.另外UI第一组重构了代码 ...
- 调研getfit
Gitfit实际是一个提供私人教练的服务,其主要业务有三种,“局部减脂”每天0.5-1小时,对局部高强度的刺激,快速达到塑形目地,不需要复杂器械,0基础也能跟上训练进度,并提供咨询师.营养师团队.专属 ...
- FTP上传下载类
public class FtpOperation { public static void UploadFile(FileInfo fileinfo, string targetDir, strin ...