(一)ROS的安装与环境配置
1.设置教程
1.1 打开system setting(系统设置)->Software&Updates(软件与更新)
1.2点击上方Other software(其他软件),点击左下角add(添加)按钮
1.3下面一段复制进去
deb http://ros.exbot.net/rospackage/ros/ubuntu/ trusty main
1.4 确定点Add Source 勾选选项
就可以愉快地在终端(快捷键:CTRL+ALT+T)里
sudo apt-get update
sudo apt-get upgrade
2正式安装和配置环境:http://wiki.ros.org/
2.1 添加 sources.list
配置你的电脑使其能够安装来自 packages.ros.org的软件。
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
2.2 添加 keys
sudo apt-key adv --keyserver hkp://pool.sks-keyservers.net --recv-key 421C365BD9FF1F717815A3895523BAEEB01FA116
2.3 更新并安装
确保你的Debian软件包索引是最新的:
sudo apt-get update //确保你的 Debian 软件包索引是最新的
sudo apt-get install ros-indigo-desktop-full //桌面完整版安装:(推荐) 包含ROS、rqt、rviz、通用机器人函数库、2D/3D仿真器、导航以及2D/3D感知功能。
2.4 初始化 rosdep
sudo rosdep init //在开始使用 ROS 之前你还需要初始化 rosdep。rosdep 可以方便在你需要编译某些源码的时候为其安装一些系统依赖,同时也是某些 ROS 核心功能组件所必需用到的工具。
rosdep update //更新ROS源代码。这个命令相当于 Linux 使用sudo apt-get update来更新系统软件,它的作用就是更新 ROS 系统中的软件包
2.5 环境设置
如果每次打开一个新的终端时ROS环境变量都能够自动配置好(即添加到bash会话中),那将会方便得多。
echo "source /opt/ros/indigo/setup.bash" >> ~/.bashrc //意思是:将source /opt/ros/indigo/setup.bash这句话 ,添加到~/.bashrc文件中。
source ~/.bashrc
- Q: 为什么要添加这个 ros 环境变量到
~/.bashrc文件?
A: 我们要想在终端中使用 ros 相关的命令的话,必须要先添加 ros 的环境变量,就是必须要先执行命令:source /opt/ros/indigo/setup.bash,然后才能使用 ros 相关的命令。所以,每次新打开一个终端,就要执行一次source /opt/ros/indigo/setup.bash命令,这样很麻烦。.bashrc文件是终端的启动文件,我们将这句话添加到启动文件中的效果就是,我们每次新打开一个终端,都会自动执行这句话。所以,直接将这条命令写到~/.bashrc文件里。
2.6 安装 rosinstall
sudo apt-get install python-rosinstall //rosinstall是 ROS 中一个独立分开的常用命令行工具,它可以方便让你通过一条命令就可以给某个 ROS 软件包下载很多源码树。
2.7检查你的ROS已经配置好了:
一个检查的好方法是确保你已经设置了像ROS_ROOT和ROS_PACKAGE_PATH这样的环境变量,可以通过以下命令查看:
export | grep ROS

或者输入以下指令进行检查:
roswtf
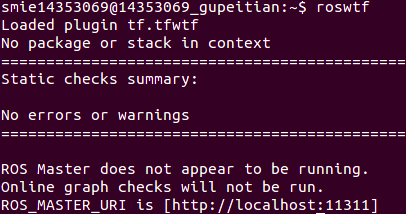
注意:如果什么都没有,我们必须对 ROS 进行配置环境变量,才可以在终端中使用 ROS 的相关命令和工具,即: source /opt/ros/indigo/setup.bash
【source命令用法:source FileName 作用:在当前bash环境下读取并执行FileName中的命令。
注:该命令通常用命令“.”来替代。 如:source .bash_rc 与 . .bash_rc 是等效的。】
再进行上面的检查,出现如上结果说明成功。但是我们使用 source 这个 指令来添加环境变量有一个缺点: 它只作用于当前终端,如果我们重新打开一个新的终端,
我们使用 export | grep ROS 命令来查看当前终端上的环境变量我们依然得不到想要的结果,所以就需要上面的2.5 环境设置。
到这里说明ROS-indgio就安装完成了。接下来,我们要做的事情是:开始ROS基础学习。
2.8卸载Indigo:用apt-get方式安装indigo的,卸载使用如下命令:
$ sudo apt-get remove ros-indigo-*
卸载成功的效果:就是/opt/ROS/indigo文件夹被删除
补充:
要查找可用软件包: apt-cache search ros-indigo
(一)ROS的安装与环境配置的更多相关文章
- ROS入门笔记(二):ROS安装与环境配置及卸载(重点)
ROS入门笔记(二):ROS安装与环境配置及卸载(重点) [TOC] 1 ROS安装步骤 1.1 ROS版本 ROS目前只支持在Linux系统上安装部署, 它的首选开发平台是Ubuntu. 发布时间 ...
- win系统下nodejs安装及环境配置
第一步:下载安装文件下载nodejs,官网:http://nodejs.org/download/,我这里下载的是node-v0.10.28-x86.msi,如下图: 第二步:安装nodejs下载完成 ...
- Laravel教程 一:安装及环境配置
Laravel教程 一:安装及环境配置 此文章为原创文章,未经同意,禁止转载. Homestead 最近在SF上面看到越来越多的Laravel相关的问题,而作为一个Laravel的脑残粉,本来打算有机 ...
- Python学习 1 一 Python2.75的安装及环境配置教程
Python2.75的安装及环境配置教程 Python的语法简洁,功能强大,有大量的第三方开发包(模块),非常适合初学者上手.同时Python不像java一样对内存要求非常高,适合做一些经常性的任务方 ...
- Yeoman入门之安装及环境配置
Yeoman入门之安装及环境配置 http://blog.csdn.net/panlingfan/article/details/27345037 http://www.nodejs.orgYEOMA ...
- Node.js安装及环境配置之Windows篇
Node.js安装及环境配置之Windows篇 一.安装环境 1.本机系统:Windows 10 Pro(64位)2.Node.js:v6.9.2LTS(64位) 二.安装Node.js步骤 1. ...
- Infer 在 Mac 上的安装和环境配置
Infer 在 Mac 上的安装和环境配置 Infer 介绍 Infer 是一个静态分析工具.Infer 可以分析 Objective-C, Java 或者 C 代码,报告潜在的问题. 任何人都可以使 ...
- QT的安装及环境配置
QT的安装及环境配置 一.windows的下QT的安装及环境配置 (一)从框架安装程序中安装 步骤: 准备:下载QT库,下载指定版本的MINGW,QT IDE 1.下载QT安装文件如:qt-win-o ...
- Windows+Python+anaconda机器学习安装及环境配置步骤
Windows+Python+anaconda机器学习安装及环境配置步骤 1. 下载安装python3.6以上版本(包含pip,不用自己安装)2. 直接下载安装pycharm安装包(用于编写pytho ...
随机推荐
- Windows 8的用户模式Shim Engine小探及利用
转载: https://bbs.pediy.com/thread-175483.htm Windows Shim Engine,即Windows 兼容性模式实现引擎,在exe文件的属性对话框中有一个兼 ...
- [转载]tornado.database添加PooledDB连接池功能
转载自 http://chenxiaoyu.org/2009/12/01/python-tornado-dbutil.html tornado.database模块简单包装了下对MySQL的操作,短小 ...
- 抽象工厂模式( Abstract Factory )
提供一个创建一系列相关或相互依赖对象的接口,而无需指定它们具体的类.解决多产品多等级结构.模式的类图如下: 抽象工厂模式的优点: 易于交换产品系列,由于具体工厂类在一个应用中只需要在初始化的时候出现一 ...
- 5S后返回首页
<!DOCTYPE html> <html> <head> <title>5S后返回首页</title> <meta http-equ ...
- JoinableQueue---创建可连接的共享进程队列
创建可连接的共享进程队列.这就像是一个Queue对象,但队列允许项目的使用者通知生产者项目已经被成功处理. 通知进程是使用共享的信号和条件变量来实现的. from multiprocessing im ...
- spring boot + jpa + kotlin入门实例
spring boot +jpa的文章网络上已经有不少,这里主要补充一下用kotlin来做. kotlin里面的data class来创建entity可以帮助我们减少不少的代码,比如现在这个User的 ...
- IPv4报文分片
1:为什么需要分片 每个数据链路层协议都有自己的帧格式,在这个格式中有一个字段是"数据字段最大长度"(MTU,最大传输单元),当数据报被封装成帧时,数据报的总长度必须小于这个最大长 ...
- 0_Simple__template
简单的 CUDA 应用模板,白送的 Sample. ▶ 源代码 //template_cpu.cpp extern "C" void computeGold(float *, co ...
- JPA和Hibernate到底是什么关系???
转自:https://www.cnblogs.com/mosoner/p/9494250.html 在学习框架的过程中,发现学的东西很多,但是感觉他们之间的联系区别都不是很了解,知道JPA可以去实现持 ...
- TTreeView.OnCustomDrawItem
TTreeNode *node; node = , "AAAA"); TreeView1->Items->AddChild(node, "aaa1" ...