【JZOJ6435】【luoguP5666】【CSP-S2019】树的重心
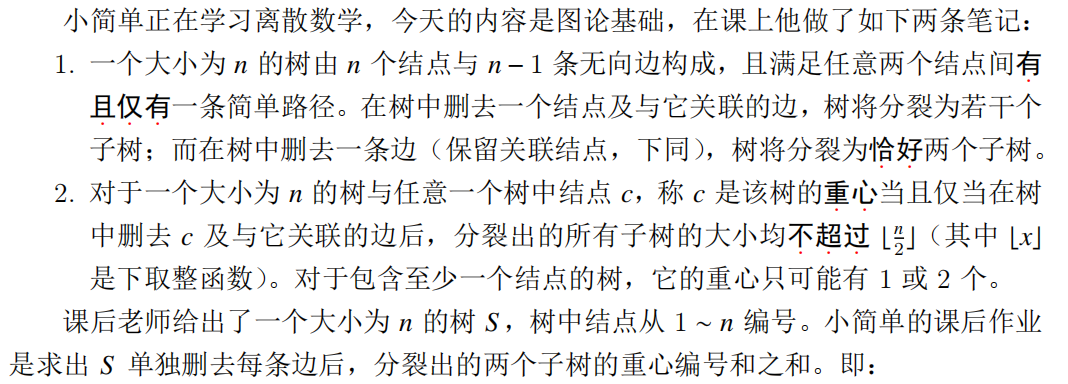
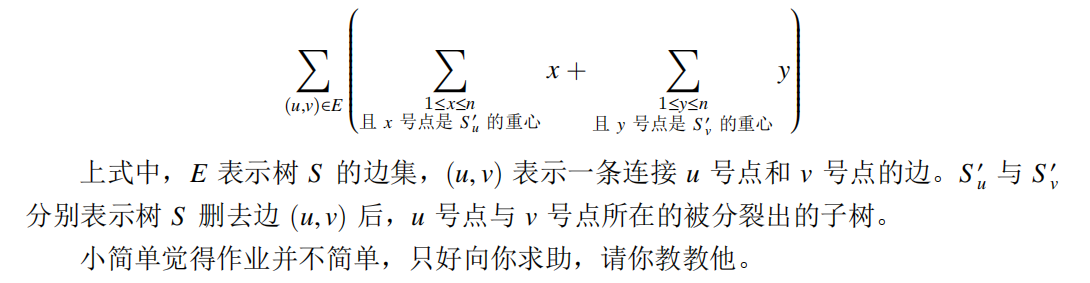
description
analysis
需要知道一棵树的重心一定在从根出发的重链上,可以考虑先进行树链剖分弄出重儿子和次重儿子,再倍增维护重儿子
由于重链上有一个或两个重心,接下来求的重心都是深度较大的,只需判断其父节点是否也满足重心的性质即可
现在要断掉一条边\((x,y)\),假设\(x\)是\(y\)的父亲,需要分别求出\(y\)的子树的重心、以及除了\(y\)的子树以外的树的重心
倍增数组已经维护好了所以\(y\)的重心很好求,对于视作\(x\)为根的子树则需要重新维护一次倍增数组
若\(y\)是重儿子则用次重儿子与\(x\)父亲\(size\)比较,否则用原来的重儿子比;知道了重儿子则可以重新算倍增数组
然后把\(x\)设为\(y\)的儿子,其实就是换根操作,递归下去求解,回溯时重新再算\(x\)的倍增数组;时间复杂度\(O(n\log n)\)
code
#include<stdio.h>
#include<string.h>
#include<algorithm>
#include<math.h>
#define MAXN 300005
#define MAXM MAXN*2
#define ll long long
#define reg register ll
#define fo(i,a,b) for (reg i=a;i<=b;++i)
#define fd(i,a,b) for (reg i=a;i>=b;--i)
#define rep(i,a) for (reg i=las[a];i;i=nex[i])
using namespace std;
ll las[MAXM],nex[MAXM],tov[MAXM];
ll fa[MAXN],size[MAXN],tsize[MAXN],hson[MAXN],secson[MAXN];
ll son[MAXN][20];
ll n,T,tot,ans,log2n;
inline ll read()
{
ll x=0,f=1;char ch=getchar();
while (ch<'0' || '9'<ch){if (ch=='-')f=-1;ch=getchar();}
while ('0'<=ch && ch<='9')x=x*10+ch-'0',ch=getchar();
return x*f;
}
inline ll max(ll x,ll y){return x>y?x:y;}
inline ll min(ll x,ll y){return x<y?x:y;}
inline void link(ll x,ll y){nex[++tot]=las[x],las[x]=tot,tov[tot]=y;}
inline void dfs1(ll x,ll y)
{
size[x]=1,fa[x]=y;
rep(i,x)if (tov[i]!=y)
{
dfs1(tov[i],x),size[x]+=size[tov[i]];
if (size[tov[i]]>size[hson[x]])secson[x]=hson[x],hson[x]=tov[i];
else if (size[tov[i]]>size[secson[x]])secson[x]=tov[i];
}
tsize[x]=size[x],son[x][0]=hson[x];
}
inline void dfs2(ll x,ll y)
{
rep(i,x)if (tov[i]!=y)
{
if (tov[i]==hson[x])son[x][0]=secson[x];
else son[x][0]=hson[x];
if (size[y]>size[son[x][0]])son[x][0]=y;
fo(k,1,log2n)son[x][k]=son[son[x][k-1]][k-1];
size[x]=n-tsize[tov[i]],size[tov[i]]=tsize[tov[i]],fa[x]=fa[tov[i]]=0;
ll now=x;
fd(k,log2n,0)if (son[now][k] && size[x]-size[son[now][k]]<=size[x]/2)now=son[now][k];
if (max(size[son[now][0]],size[x]-size[now])<=size[x]/2)ans+=now;
if (max(size[son[fa[now]][0]],size[x]-size[fa[now]])<=size[x]/2)ans+=fa[now];
now=tov[i];
fd(k,log2n,0)if (son[now][k] && size[tov[i]]-size[son[now][k]]<=size[tov[i]]/2)now=son[now][k];
if (max(size[son[now][0]],size[tov[i]]-size[now])<=size[tov[i]]/2)ans+=now;
if (max(size[son[fa[now]][0]],size[tov[i]]-size[fa[now]])<=size[tov[i]]/2)ans+=fa[now];
fa[x]=tov[i],dfs2(tov[i],x);
}
fa[x]=y,son[x][0]=hson[x],size[x]=tsize[x];
fo(k,1,log2n)son[x][k]=son[son[x][k-1]][k-1];
}
int main()
{
T=read();
while (T--)
{
memset(las,0,sizeof(las)),memset(nex,0,sizeof(nex));
memset(tov,0,sizeof(tov)),memset(secson,0,sizeof(secson));
memset(fa,0,sizeof(fa)),memset(son,0,sizeof(son)),memset(hson,0,sizeof(hson));
n=read(),log2n=(ll)log2(n),ans=tot=0;
fo(i,1,n-1){ll x=read(),y=read();link(x,y),link(y,x);}
dfs1(1,0);
fo(j,1,log2n)fo(i,1,n)son[i][j]=son[son[i][j-1]][j-1];
dfs2(1,0),printf("%lld\n",ans);
}
return 0;
}
【JZOJ6435】【luoguP5666】【CSP-S2019】树的重心的更多相关文章
- 【CSP模拟赛】仔细的检查(树的重心&树hash)
题目描述 nodgd家里种了一棵树,有一天nodgd比较无聊,就把这棵树画在了一张纸上.另一天nodgd更无聊,就又画了一张. 这时nodgd发现,两次画的顺序是不一样的,这就导致了原本的某一个节点 ...
- POJ3107Godfather[树形DP 树的重心]
Godfather Time Limit: 2000MS Memory Limit: 65536K Total Submissions: 6121 Accepted: 2164 Descrip ...
- poj1655 树的重心 树形dp
树的重心定义为:找到一个点,其所有的子树中最大的子树节点数最少,那么这个点就是这棵树的重心,删去重心后,生成的多棵树尽可能平衡. 处理处每个节点的孩子有几个,和树的大小就好了. #include< ...
- poj3107 求树的重心(&& poj1655 同样求树的重心)
题目链接:http://poj.org/problem?id=3107 求树的重心,所谓树的重心就是:在无根树转换为有根树的过程中,去掉根节点之后,剩下的树的最大结点最小,该点即为重心. 剩下的数的 ...
- 树形DP求树的重心 --SGU 134
令一个点的属性值为:去除这个点以及与这个点相连的所有边后得到的连通分量的节点数的最大值. 则树的重心定义为:一个点,这个点的属性值在所有点中是最小的. SGU 134 即要找出所有的重心,并且找出重心 ...
- 求树的重心(POJ1655)
题意:给出一颗n(n<=2000)个结点的树,删除其中的一个结点,会形成一棵树,或者多棵树,定义删除任意一个结点的平衡度为最大的那棵树的结点个数,问删除哪个结点后,可以让平衡度最小,即求树的重心 ...
- codeforces 685B Kay and Snowflake 树的重心
分析:就是找到以每个节点为根节点的树的重心 树的重心可以看这三篇文章: 1:http://wenku.baidu.com/link?url=yc-3QD55hbCaRYEGsF2fPpXYg-iO63 ...
- POJ 1655 Balancing Act (求树的重心)
求树的重心,直接当模板吧.先看POJ题目就知道重心什么意思了... 重心:删除该节点后最大连通块的节点数目最小 #include<cstdio> #include<cstring&g ...
- POJ3107--Godfather(树的重心)
vector建图被卡了..改为链式前向星500ms过的..差了四倍多?... 表示不太会用链表建图啊..自己试着写的,没看模板..嗯..果然错了..落了一句话orz 树的重心就是找到一个树中一个点,其 ...
随机推荐
- 【leetcode】990. Satisfiability of Equality Equations
题目如下: Given an array equations of strings that represent relationships between variables, each strin ...
- RBAC权限设计(一)
序言 RBAC表结构 用户表 角色表 权限表 用户角色(关系)表 角色权限(关系)表 sql脚本 /* Navicat MySQL Data Transfer Source Server : 127. ...
- 常见sql操作
1. select '`'||b.mrchno 商户号, b.name 商户名称, b.contact3 注册地址联系人, '`'||b.telno1 邮寄地址联系电话, a.MRCHT_NAME X ...
- vue开发环境及vue相关
一.安装node.js Vue项目通常通过webpack工具来构建,而webpack命令的执行是依赖node.js的环境的,所以首先要安装node.js. 二.安装cnpm cnpm是淘宝对npm的镜 ...
- mysql性能查看 命中率 慢查询
网上有很多的文章教怎么配置MySQL服务器,但考虑到服务器硬件配置的不同,具体应用的差别,那些文章的做法只能作为初步设置参考,我们需要根据自己的情况进行配置优化,好的做法是MySQL服务器稳定运行了一 ...
- 【开源项目】一篇文章搞掂:Pig微服务框架
1.项目开发环境和运行步骤 1.1.项目开发环境 Idea:2018.1.6 Maven:3.5.3 JDK:1.8.0_172 MySQL:5.7.19(之前安装8.0.11会运行失败) Redis ...
- 设置当内容超出div(文字长度超出div宽度)出现滚动条
overflow 一共有5个属性. 1.overflow:auto:内容会被修剪,超出设置的宽高后会出现滚动条 2.overflow:scroll;内容会被修剪,不管内容是否超出,都会出现滚动条的位置 ...
- 88、展示Tensorflow计算图上每个节点的基本信息以及运行时消耗的时间和空间
''' Created on May 24, 2017 @author: p0079482 ''' #使用程序输出日志 import tensorflow as tf with tf.Session( ...
- 通过angular.js实现MVC的基本步骤
通过ng实现MVC的基本步骤: ①创建模块 var app = angular.module('模块名字',['依赖模块1','依赖模块2']) ②调用模块 ngApp--> ng-app=&q ...
- 哈希表(hash)详解
哈希表结构讲解: 哈希表(Hash table,也叫散列表),是根据关键码值(Key value)而直接进行访问的数据结构.也就是说,它通过把关键码值映射到表中一个位置来访问记录,以加快查找的速度. ...