implement Google's Open Source Slam "Cartographer" demos in ROS/rviz
Cartographer is a backpack equipped with Simultaneous Localization and Mapping (SLAM) technology.
1. Platform
Dell PC installed Ubuntu 14.4 and ROS Indigo.
2. Building & Installation
We recommend using wstool and rosdep. For faster builds, we also recommend using Ninja.
# Install wstool and rosdep.
sudo apt-get update
sudo apt-get install -y python-wstool python-rosdep ninja-build # Create a new workspace in 'catkin_ws'.
mkdir catkin_ws
cd catkin_ws
wstool init src # Merge the cartographer_ros.rosinstall file and fetch code for dependencies.
wstool merge -t src https://raw.githubusercontent.com/googlecartographer/cartographer_ros/master/cartographer_ros.rosinstall
wstool update -t src # Install deb dependencies.
rosdep init
rosdep update
rosdep install --from-paths src --ignore-src --rosdistro=${ROS_DISTRO} -y # Build and install.
catkin_make_isolated --install --use-ninja
source install_isolated/setup.bash
3. Running the demos
Now that Cartographer and Cartographer’s ROS integration are installed, download the example bags (e.g. 2D and 3D backpack collections of the Deutsches Museum) to a known location, in this case ~/Downloads, and use roslaunch to bring up the demo:
# Download the 2D backpack example bag.
wget -P ~/Downloads https://storage.googleapis.com/cartographer-public-data/bags/backpack_2d/cartographer_paper_deutsches_museum.bag # Launch the 2D backpack demo.
roslaunch cartographer_ros demo_backpack_2d.launch bag_filename:=${HOME}/Downloads/cartographer_paper_deutsches_museum.bag # Download the 3D backpack example bag.
wget -P ~/Downloads https://storage.googleapis.com/cartographer-public-data/bags/backpack_3d/cartographer_3d_deutsches_museum.bag # Launch the 3D backpack demo.
roslaunch cartographer_ros demo_backpack_3d.launch bag_filename:=${HOME}/Downloads/cartographer_3d_deutsches_museum.bag # Download the Revo LDS example bag.
wget -P ~/Downloads https://storage.googleapis.com/cartographer-public-data/bags/revo_lds/cartographer_paper_revo_lds.bag # Launch the Revo LDS demo. ---- Failed to implement this one.
roslaunch cartographer_ros demo_revo_lds.launch bag_filename:=${HOME}/Downloads/cartographer_paper_revo_lds.bag # Download the PR2 example bag.
wget -P ~/Downloads https://storage.googleapis.com/cartographer-public-data/bags/pr2/2011-09-15-08-32-46.bag # Launch the PR2 demo.
roslaunch cartographer_ros demo_pr2.launch bag_filename:=${HOME}/Downloads/2011-09-15-08-32-46.bag
The launch files will bring up roscore and rviz automatically.
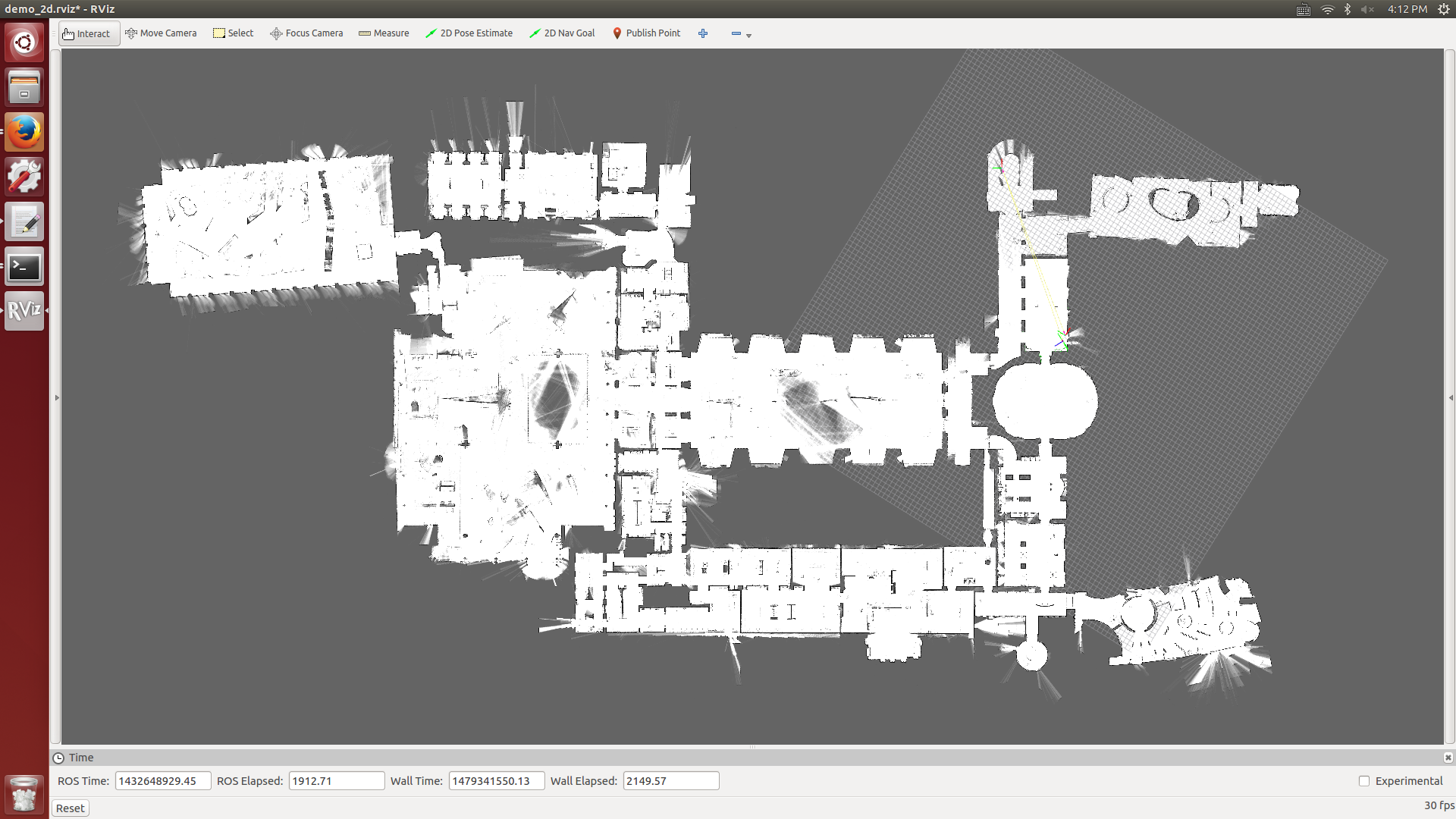
4. Results
2D backpack demo:
3D backpack demo:

Revo LDS demo:
Failed
PR2 demo:

Reference:
implement Google's Open Source Slam "Cartographer" demos in ROS/rviz的更多相关文章
- Google's Open Source SLAM Library ---- Cartographer
What is Cartographer? Google announce the open source release of Cartographer, a real-time simultane ...
- slam cartographer 学习
https://github.com/slam4code 感谢大牛的分享
- cartographer Ubuntu16.04 ros环境配置
首先要正确安装 ROS ,然后第12步应注意,proto的版本是个关键容易出错. 1.添加ROS源http:/packages.ros.org/ros/ubuntu xenial main ( ...
- Open Source Projects Released By Google
Open Source Projects Released By Google Google has released over 20 million lines of code and over 9 ...
- ROS_Kinetic_27 在ROS中使用Cartographer进行SLAM
ROS_Kinetic_27 在ROS中使用Cartographer进行SLAM Cartographer是谷歌新開源的通用的2D和3D定位與構圖同步的SLAM工具,並提供ROS接口. 论文Real- ...
- [资源] Open source packages on SLAM
OpenSLAM http://openslam.org/ Most main stream open source slam resource can be found on OpenSLAM, w ...
- source.android.google && developer.android.google
https://source.android.google.cn/ https://developer.android.google.cn/ https://source.android.com/co ...
- (转) 实时SLAM的未来及与深度学习的比较
首页 视界智尚 算法技术 每日技术 来打我呀 注册 实时SLAM的未来及与深度学习的比较 The Future of Real-Time SLAM and “Deep Learni ...
- 基于视觉的 SLAM/Visual Odometry (VO) 开源资料、博客和论文列表
基于视觉的 SLAM/Visual Odometry (VO) 开源资料.博客和论文列表 以下为机器翻译,具体参考原文: https://github.com/tzutalin/awesome-vis ...
随机推荐
- vi的使用规则
1.vi的基本概念 基本上vi可以分为三种状态,分别是 命令模式(command mode).插入模式(Insertmode)和 底行模式(last line mode) 各模式的功能区分如下: 1 ...
- PL/SQL显示行号和高亮当前行
PL/SQL Developer 如何显示行号: PL/SQL Developer 高亮当前行: OK!
- mha的搭建步骤(一主一从架构)
所需脚本文件到这里下载:http://note.youdao.com/share/web/file.html?id=ae8b11a61f7a8aa7b52aac3fcf0c4b83&type= ...
- smb.conf
[home]comment = All Printerspath = /homevalid users = yorkwriteable=yespublic=yesbrowseable = yescre ...
- 【转】SVN服务器搭建--Subversio与TortoiseSVN的配置安装
转载地址:http://blog.csdn.net/xinxin19881112/article/details/6410263 1. Subversio和TortoiseSVN 简介 Subver ...
- oracle中的自动增长
create table test( id int not null primary key, name varchar2(20), sex int) ; create sequence t -> ...
- 《python核心编程》读书笔记--第16章 网络编程
在进行网络编程之前,先对网络以及互联网协议做一个了解. 推荐阮一峰的博客:(感谢) http://www.ruanyifeng.com/blog/2012/05/internet_protocol_s ...
- PowerShell调用jira rest api实现对个人提交bug数的统计
通过PowerShell的invoke-webrequest和net.client联合实现个人指定项目jira提交数的统计,其中涉及到了JSON对象的提交,代码如下: $content = @{use ...
- hdu 1205 从整体考虑
吃糖果 Time Limit: 6000/3000 MS (Java/Others) Memory Limit: 65535/32768 K (Java/Others)Total Submiss ...
- Mysql 升级到 5.6 后插入语句时间字段报错:Incorrect datetime value: '' for column 'createtime'
今天部署服务器项目运行,当遇见有时间数据对象的插入和更新操作的时候,就报错,如下: Caused by: com.mysql.jdbc.MysqlDataTruncation: Data trunca ...