STM32标准库通用定时器输入捕获
STM32标准库定时器输入捕获
1.输入捕获介绍
输入捕获为STM32定时器的一个功能,可以用来测量输入信号的频率和占空比。
具体原理:当输入信号经过比较捕获通道时,STM32会依据通道的极性设置决定是否触发捕获中断TIM_IT_CCx。此时定时器会将当前计数值TIMx->CNT的值保存在TIMx->CCRx中,通过计算两次捕获中断的时间差便可计算出捕获的电平时长,由此可计算出输入信号的频率、周期、占空比等信息。
在本文中,使用野火指南者开发板,配置TIM2定时器的通道4为输入通道,TIM3定时器的通道1为输出通道。
2. 输入捕获通道与定时器初始化
需要引用头文件
#include "stm32f10x_gpio.h"
#include "stm32f10x_rcc.h"
#include "stm32f10x_tim.h"
void TIM2_Init() // 定时器2初始化
{
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2,ENABLE); // 使能定时器2的时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE); // 使能GPIOA的时钟
GPIO_InitTypeDef GPIO_InitStructure; // 定义GPIO_InitTypeDef类型的结构体
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure; // 定义TIM_TimeBaseInitTypeDef类型的结构体
TIM_ICInitTypeDef TIM_IC_nitStructure; // 定义TIM_ICInitTypeDef类型的结构体
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_3 ; // 选择通道4的引脚
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; // 设置通道4为浮空输入
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; // 设置引脚速度为50MHz
GPIO_Init(GPIOA,&GPIO_InitStructure); // 初始化GPIOA
TIM_TimeBaseInitStructure.TIM_Period = 1000-1; // 设置定时器2的自动重装值,计数到1000-1
TIM_TimeBaseInitStructure.TIM_Prescaler = 720-1; // 设置定时器2的预分频值,分频720-1
TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1; // 设置时钟分割
TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up; // 设置计数器模式为向上计数
TIM_TimeBaseInit(TIM2,&TIM_TimeBaseInitStructure); // 初始化定时器2
TIM_IC_nitStructure.TIM_Channel = TIM_Channel_4; // 选择通道4
TIM_IC_nitStructure.TIM_ICPolarity = TIM_ICPolarity_Rising; // 设置通道4的上升沿触发
TIM_IC_nitStructure.TIM_ICPrescaler = TIM_ICPSC_DIV1; // 设置通道4的输入分频器
TIM_IC_nitStructure.TIM_ICSelection = TIM_ICSelection_DirectTI; // 设置通道4映射到TI4
TIM_IC_nitStructure.TIM_ICFilter = 0x00; // 设置通道4的滤波器
TIM_ICInit(TIM2,&TIM_IC_nitStructure); // 初始化定时器2的通道4
NVIC_InitTypeDef NVIC_InitStructure; // 定义NVIC_InitTypeDef结构体变量
NVIC_InitStructure.NVIC_IRQChannel = TIM2_IRQn; // 选择定时器2的中断通道
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1; // 设置中断优先级
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1; // 设置中断子优先级
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; // 使能中断通道
NVIC_Init(&NVIC_InitStructure); // 初始化NVIC_InitTypeDef结构体变量
TIM_ITConfig(TIM2,TIM_IT_CC4 | TIM_IT_Update ,ENABLE); // 使能定时器2的通道4的中断和更新中断
TIM_Cmd(TIM2,ENABLE); // 使能定时器2
}
需要注意输入通道引脚为GPIO_Mode_IN_FLOATING模式,TIM_Period为定时器溢出值。
TIM_ICInitTypeDef:输入捕获通道配置结构体。
TIM_Channel:输入通道,可选参数为TIM_Channel_x。
TIM_ICPolarity:输入通道极性设置,可选参数为TIM_ICSelection_DirectTI、TIM_ICSelection_IndirectTI、TIM_ICSelection_TRC。
TIM_ICSelection_DirectTI:将定时器输入通道1、2、3、4依次映射到IC1、IC2、IC3、IC4。
TIM_ICSelection_IndirectTI:将定时器输入通道1、2、3、4依次映射到IC2、IC1、IC4、IC3。
TIM_ICSelection_TRC:将定时器输入通道1、2、3、4连接至TRC我暂时也不知道这个TRC是啥。
TIM_ICFilter:输入通道滤波器设置,可选参数为0x0~0xF。决定了多少次边沿变换会触发一次输入捕获。
3. 中断函数编写
输入捕获中断与定时器中断共用一个中断NVIC。
uint16_t Up_Capture_Cnt,Down_Capture_Cnt,Up_Capture,Up_Capture_Cnt_Temp,Down_Capture;
uint16_t timer_cnt2,timer_cnt1 = 0;
uint16_t Get_State = 0,Get_State1 = 0;
void TIM2_IRQHandler() // 定时器2中断函数
{
if(TIM_GetITStatus(TIM2,TIM_IT_Update) == SET) // 定时器2更新中断
{
timer_cnt1++; // 定时器计数标志量1每溢出一次加一
timer_cnt2++; // 定时器计数标志量2每溢出一次加一
if(timer_cnt1 == 10000) // 定时器计数标志量1溢出时清零
{
timer_cnt1 = 0; // 定时器计数标志量1清零
}
if(timer_cnt2 == 10000) // 定时器计数标志量2溢出时清零
{
timer_cnt2 = 0; // 定时器计数标志量2清零
}
}
if(TIM_GetITStatus(TIM2,TIM_IT_CC4) == SET) // 定时器2输入捕获中断
{
switch(Get_State) // 判断输入捕获状态
{
case 0 :
Up_Capture_Cnt_Temp = Up_Capture_Cnt; // 保存上一次输入捕获通道的值
Down_Capture_Cnt = TIM_GetCapture4(TIM2); // 获取当前输入捕获通道的值
Down_Capture = Down_Capture_Cnt + (timer_cnt2 * 1000) - Up_Capture_Cnt_Temp; // 计算脉冲宽度
timer_cnt1 = 0; // 定时器计数标志量1清零
timer_cnt2 = 0; // 定时器计数标志量2清零
TIM_ClearITPendingBit(TIM2,TIM_IT_CC4); // 清除输入捕获通道的中断标志位
TIM_OC4PolarityConfig(TIM2,TIM_ICPolarity_Falling); // 设置输入捕获通道的极性为下降沿
Get_State = 1; // 设置输入捕获通道的状态为1
break; // 跳出switch语句
case 1:
Up_Capture_Cnt = TIM_GetCapture4(TIM2); // 获取当前输入捕获通道的值
Up_Capture = Up_Capture_Cnt + (timer_cnt1 * 1000) - Down_Capture_Cnt; // 计算脉冲宽度
timer_cnt1 = 0; // 定时器计数标志量1清零
timer_cnt2 = 0; // 定时器计数标志量2清零
TIM_ClearITPendingBit(TIM2,TIM_IT_CC4); // 清除输入捕获通道的中断标志位
TIM_OC4PolarityConfig(TIM2,TIM_ICPolarity_Rising); // 设置输入捕获通道的极性为上升沿
Get_State = 0; // 设置输入捕获通道的状态为0
break; // 跳出switch语句
}
}
TIM_ClearITPendingBit(TIM2,TIM_IT_Update); // 清除定时器溢出中断标志位
}
4. 中断函数代码具体逻辑解释
光看代码可能捋不清先后关系,来看下图就知道了,如图1所示:
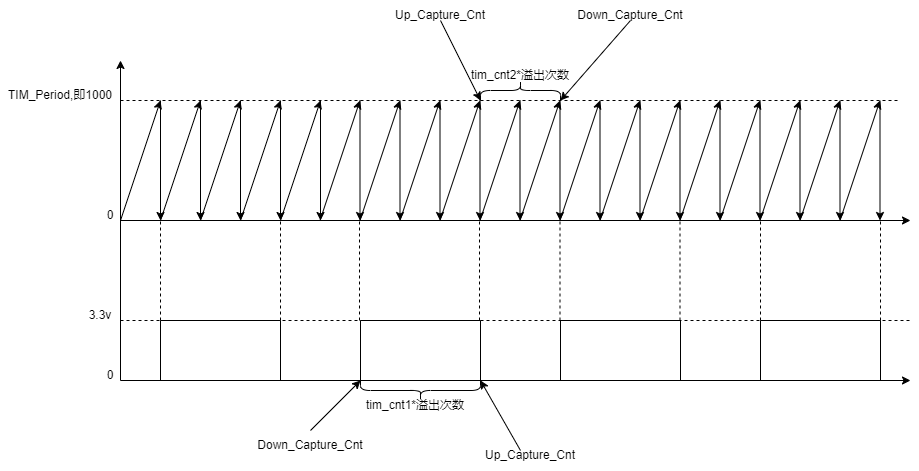
在图中可以看到,当输入捕获通道的信号周期要长于输入捕获的通道时钟周期时,会导致第二次读取的值比第一次读取的值小,如果不使用定时器溢出次数进行辅助运算会导致算出来的是负数。之后第一次读取的值+溢出时间-第二次读取的值,得到的结果就是脉冲宽度,第二次读取的值+溢出时间-第一次读取的值,得到的就是周期中另一部分的宽度。有了这些信息,就可以得到频率、周期和占空比了。
STM32标准库通用定时器输入捕获的更多相关文章
- 单片机stm32零基础入门之--初识STM32 标准库
CMSIS 标准及库层次关系 因为基于Cortex 系列芯片采用的内核都是相同的,区别主要为核外的片上外设的差异,这些差异却导致软件在同内核,不同外设的芯片上移植困难.为了解决不同的芯片厂商生产的Co ...
- STM32 标准库
CMSIS 标准及库层次关系 因为基于Cortex 系列芯片采用的内核都是相同的,区别主要为核外的片上外设的差异,这些差异却导致软件在同内核,不同外设的芯片上移植困难.为了解决不同的芯片厂商生产的Co ...
- stm32cube--通用定时器--输入捕获
用定时器输入捕获做红外线接收实验.(此次试验以通道2为例) ①stm32cube配置 ② ③ ④程序中主要用到的输入捕获相关寄存器 uint16_t tim_sr,tim_ccer,tim_ccr; ...
- STM32标准库GPIO操作
STM32标准库GPIO操作 STM32任何外围设备的使用都分为两部分:初始化和使用.体现在代码上就是:(1)有一个初始化函数(2)main函数中的使用 1.初始化GPIO 初始化GPIO函数代码: ...
- 初识STM32标准库
1.CMSIS 标准及库层次关系 CMSIS 标准中最主要的为 CMSIS 核心层,它包括了: STM32标准库可以从官网获得: 在使用库开发时,我们需要把 libraries 目录下的库函数文件添加 ...
- STM32之定时器输入捕获
1.输入捕获模式可以用来测量脉冲宽度或者测量频率.STM32的定时器,除了TIM6和TIM7,其他定时器都有输入捕获功能.STM32的输入捕获,简单的说就是通过检测TIMx_CHx上的边沿信号,在边沿 ...
- stm32f103_高级定时器——输入捕获/输出比较中断+pwm=spwm生成
****************************首选我们了解一下它们的功能吧********************************************************** ...
- STM32 标准库V3.5启动文件startup_stm32f10xxx.s分析
layout: post tags: [STM32] comments: true 文章目录 layout: post tags: [STM32] comments: true 前言 分析startu ...
- STM32 标准库3.5修改默认外部8M晶振为16M晶振
ST官方标准库V3.5默认的外部晶振频率为8M,实际使用中外部晶振需要修改为16M: 经过实验,修改有效,具体的patch如下: 修改 HSE_VALUE 值 diff --git "a/L ...
- STM32 HAL库的定时器中断回调函数跟串口中断回调函数
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim) { //添加回调后的程序逻辑 if (htim->Instance == ...
随机推荐
- 【Java】ArrayList线程不安全的坑
问题复现: 使用Java的steam().paralleStream(),foreach()方法向ArrayList添加数据,导致ArrayList中出现空值,代码如下: public static ...
- MySQL【一】基本使用----超详细教学
相关文章: win10下MySQL安装教程(MySql-8.0.26超级详细)_丨汀.的博客-CSDN博客 1.RDBMS(Relational Databases Management System ...
- 2.7 CE修改器:多级指针查找
在本步骤中,你需要使用多级指针的概念来查找健康值真正的地址并修改它.多级指针就是一个指针的指针,也就是第一个指针指向第二个指针,第二个指针指向第三个指针,以此类推,最终指向你想要访问的地址. 首先,你 ...
- 3.0 熟悉IDAPro静态反汇编器
IDA Pro 是一种功能强大且灵活的反汇编工具,可以在许多领域中发挥作用,例如漏洞研究.逆向工程.安全审计和软件开发等,被许多安全专家和软件开发者用于逆向工程和分析二进制代码.它支持大量的二进制文件 ...
- 19.5 Boost Asio 传输结构体
同步模式下的结构体传输与原生套接字实现方式完全一致,读者需要注意的是在接收参数是应该使用socket.read_some函数读取,发送参数则使用socket.write_some函数实现,对于套接字的 ...
- Asp .Net Core 系列:Asp .Net Core 配置 System.Text.Json
目录 简介 Asp .Net Core 如何配置 System.Text.Json 所有配置 全局配置 对比 Newtonsoft.Json 无实体类型下操作 Json 自定义转换器 处理 Dynam ...
- 遥感图像处理笔记之【Deep learning for Geospatial data applications — Multi-label Classification】
遥感图像处理学习(2) 前言 遥感图像处理方向的学习者可以参考或者复刻 本文初编辑于2023年12月14日 2024年1月24日搬运至本人博客园平台 文章标题:Deep learning for Ge ...
- PHP中GD库
PHP中GD库 一.GD库的介绍 1.GD库是什么? Graphic Device,图像工具库,gd库是php处理图形的扩展库,GD库提供了一系列用来处理图片的API,使用GD库可以处理图片,或者生成 ...
- Azure Data Factory(十二)传参调用 Azure Function
一,引言 在实际的项目中,Azure Data Factroy 中的 Data Flow 并不能彻底帮我们完成一系列复制逻辑计算, 比如我们需要针对数据集的每一行数据进行判断计算,Data Flow ...
- uni-uadmin后台管理系统|uniapp+uView跨端后台框架实例
基于uniapp+uview+uni-ui跨平台手机端后台管理系统UniappUAdmin. uniapp-uadmin 基于uni-app+uView+uniUI研发的跨端手机后台管理系统项目.全新 ...